Design of a Drone with a Robotic End-Effector
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Humanoid Robot
NAIN 1.0 – A HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Department of Electronics & Communication Engineering Meerut Institute of Engineering & Technology Meerut, U.P. (India)-250005 May, 2018 NAIN 1.0 – HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Submitted to the Department of Electronics & Communication Engineering in partial fulfillment of the requirements for the degree of Bachelor of Technology in Electronics & Communication Meerut Institute of Engineering & Technology, Meerut Dr. A.P.J. Abdul Kalam Technical University, Lucknow May, 2018 DECLARATION I hereby declare that this submission is my own work and that, to the best of my knowledge and belief, it contains no material previously published or written by another person nor material which to a substantial extent has been accepted for the award of any other degree or diploma of the university or other institute of higher learning except where due acknowledgment has been made in the text. Signature Signature Name: Mr. Shivam Shukla Name: Mr. Shashank Bhardwaj Roll No. 1406831124 Roll No. 1406831117 Date: Date: Signature Name: Mr. Shubham Kumar Roll No. 1406831131 Date: ii CERTIFICATE This is to certify that Project Report entitled “Humanoid Robot” which is submitted by Shivam Shukla (1406831124), Shashank Bhardwaj (1406831117), Shubahm Kumar (1406831131) in partial fulfillment of the requirement for the award of degree B.Tech in Department of Electronics & Communication Engineering of Gautam Buddh Technical University (Formerly U.P. Technical University), is record of the candidate own work carried out by him under my/our supervision. The matter embodied in this thesis is original and has not been submitted for the award of any other degree. -
The Tip of a Hospitality Revolution (5:48 Mins) Listening Comprehension with Pre-Listening and Post-Listening Exercises Pre-List
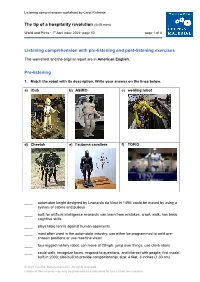
Listening comprehension worksheet by Carol Richards The tip of a hospitality revolution (5:48 mins) World and Press • 1st April issue 2021• page 10 page 1 of 8 Listening comprehension with pre-listening and post-listening exercises This worksheet and the original report are in American English. Pre-listening 1. Match the robot with its description. Write your answer on the lines below. a) iCub b) ASIMO c) welding robot d) Cheetah e) l’automa cavaliere f) TOPIO ____ automaton knight designed by Leonardo da Vinci in 1495; could be moved by using a system of cables and pulleys ____ built for artificial intelligence research; can learn from mistakes, crawl, walk; has basic cognitive skills ____ plays table tennis against human opponents ____ most often used in the automobile industry; can either be programmed to weld pre- chosen positions or use machine vision ____ four-legged military robot, can move at 28mph, jump over things, use climb stairs ____ could walk, recognize faces, respond to questions, and interact with people; first model built in 2000; also built to provide companionship; size: 4 feet, 3 inches (1.30 cm) © 2021 Carl Ed. Schünemann KG. All rights reserved. Copies of this material may only be produced by subscribers for use in their own lessons. The tip of a hospitality revolution World and Press • April 1 / 2021 • page 10 page 2 of 8 2. Vocabulary practice Match the terms on the left with their German meanings on the right. Write your answers in the grid below. a) billion A Abfindung b) competitive advantage B auf etw. -

Inverse Kinematics at the Anthropomorphic Robots, by a Trigonometric Method
American Journal of Engineering and Applied Sciences Original Research Paper Inverse Kinematics at the Anthropomorphic Robots, by a Trigonometric Method 1Relly Victoria V. Petrescu, 2Raffaella Aversa, 3Bilal Akash, 4Ronald B. Bucinell, 5Juan M. Corchado, 2Antonio Apicella and 1Florian Ion T. Petrescu 1ARoTMM-IFToMM, Bucharest Polytechnic University, Bucharest, (CE), Romania 2Advanced Material Lab, Department of Architecture and Industrial Design, Second University of Naples, 81031 Aversa (CE), Italy 3Dean of School of Graduate Studies and Research, American University of Ras Al Khaimah, UAE 4Union College, USA 5University of Salamanca, Spain Article history Abstract: A robot is a machine especially programmable one through a Received: 03-01-2017 computer capable of performing a complex series of actions in the Revised: 05-01-2017 automatic mode. Robots may be guided by a control device or external Accepted: 27-04-2017 control may be incorporated in the inside. Robots can be built to take human form, but most robots are machines designed to perform a task Corresponding Author: Florian Ion T. Petrescu without taking into account the manner in which it looks. The branch of ARoTMM-IFToMM, the technology which is concerned with the design, construction, Bucharest Polytechnic operation and application of robots, as well as other information systems University, Bucharest, (CE) for their control, the feedback of the touch screen and processing Romania information is quite robotic. These technologies do with automatic Email: [email protected] machine, which may take the place of the people in hazardous environments or manufacturing processes, or looks like people in appearance, behavior and/or cognitive. Many of the robots of today are inspired by nature which contributes to the field of robotics bio-inspired by it. -

Surveillance Robot Controlled Using an Android App Project Report Submitted in Partial Fulfillment of the Requirements for the Degree Of
Surveillance Robot controlled using an Android app Project Report Submitted in partial fulfillment of the requirements for the degree of Bachelor of Engineering by Shaikh Shoeb Maroof Nasima (Roll No.12CO92) Ansari Asgar Ali Shamshul Haque Shakina (Roll No.12CO106) Khan Sufiyan Liyaqat Ali Kalimunnisa (Roll No.12CO81) Mir Ibrahim Salim Farzana (Roll No.12CO82) Supervisor Prof. Kalpana R. Bodke Co-Supervisor Prof. Amer Syed Department of Computer Engineering, School of Engineering and Technology Anjuman-I-Islam’s Kalsekar Technical Campus Plot No. 2 3, Sector -16, Near Thana Naka, Khanda Gaon, New Panvel, Navi Mumbai. 410206 Academic Year : 2014-2015 CERTIFICATE Department of Computer Engineering, School of Engineering and Technology, Anjuman-I-Islam’s Kalsekar Technical Campus Khanda Gaon,New Panvel, Navi Mumbai. 410206 This is to certify that the project entitled “Surveillance Robot controlled using an Android app” is a bonafide work of Shaikh Shoeb Maroof Nasima (12CO92), Ansari Asgar Ali Shamshul Haque Shakina (12CO106), Khan Sufiyan Liyaqat Ali Kalimunnisa (12CO81), Mir Ibrahim Salim Farzana (12CO82) submitted to the University of Mumbai in partial ful- fillment of the requirement for the award of the degree of “Bachelor of Engineering” in De- partment of Computer Engineering. Prof. Kalpana R. Bodke Prof. Amer Syed Supervisor/Guide Co-Supervisor/Guide Prof. Tabrez Khan Dr. Abdul Razak Honnutagi Head of Department Director Project Approval for Bachelor of Engineering This project I entitled Surveillance robot controlled using an android application by Shaikh Shoeb Maroof Nasima, Ansari Asgar Ali Shamshul Haque Shakina, Mir Ibrahim Salim Farzana,Khan Sufiyan Liyaqat Ali Kalimunnisa is approved for the degree of Bachelor of Engineering in Department of Computer Engineering. -

Critical Review of Robots and Humans Interaction
http://www.inosr.net/inosr-applied-sciences/ Henry et al INOSR APPLIED SCIENCES 4(1): 22-29, 2018 ©INOSR PUBLICATIONS International Network Organization for Scientific Research ISSN: 2705-165X Critical Review of Robots and Humans Interaction Henry Anthony, Maddison Luna and Joseph Penelope Computer science Colombia University New York, USA ABSTRACT This article shows the critical review of advantage of the many benefits it offers. robots and human interaction. A robot is a Manufacturers in the UK are starting machine especially one programmable by invest more in the technology in a computer capable of carrying out a preparation for our departure from the complex series of actions automatically EU, allowing them to maintain their The idea of automata originates in the competitive edge in the market. Naturally, mythologies of many cultures around the not everyone has been convinced of the world. Engineers and inventors from advantages robotic automation can ancient civilizations, including Ancient deliver. There is still some cautiousness China,[16] Ancient Greece, and Ptolemaic about adapting an existing production Egypt, attempted to build self-operating line, with some reasonable objections machines, some resembling animals and posed by those yet to try the technology. humans. The growing popularity of robotic To address both sides of the discussion, we automation across a wide range of sectors have put together a few brief advantages looks set to continue over the next few and disadvantages of using robotic years, as businesses look to take automation. Keywords: Critical, review, Robots, Humans, interaction. INTRODUCTION A robot is a machine especially one robots, UAV drones such as General programmable by a computer capable of Atomics MQ-1 Predator, and even carrying out a complex series of actions microscopic nano robots. -

Communicating Simulated Emotional States of Robots by Expressive Movements
Middlesex University Research Repository An open access repository of Middlesex University research http://eprints.mdx.ac.uk Sial, Sara Baber (2013) Communicating simulated emotional states of robots by expressive movements. Masters thesis, Middlesex University. [Thesis] Final accepted version (with author’s formatting) This version is available at: https://eprints.mdx.ac.uk/12312/ Copyright: Middlesex University Research Repository makes the University’s research available electronically. Copyright and moral rights to this work are retained by the author and/or other copyright owners unless otherwise stated. The work is supplied on the understanding that any use for commercial gain is strictly forbidden. A copy may be downloaded for personal, non-commercial, research or study without prior permission and without charge. Works, including theses and research projects, may not be reproduced in any format or medium, or extensive quotations taken from them, or their content changed in any way, without first obtaining permission in writing from the copyright holder(s). They may not be sold or exploited commercially in any format or medium without the prior written permission of the copyright holder(s). Full bibliographic details must be given when referring to, or quoting from full items including the author’s name, the title of the work, publication details where relevant (place, publisher, date), pag- ination, and for theses or dissertations the awarding institution, the degree type awarded, and the date of the award. If you believe that any material held in the repository infringes copyright law, please contact the Repository Team at Middlesex University via the following email address: [email protected] The item will be removed from the repository while any claim is being investigated. -

PRE-HISPANIC CENTRAL MEXICAN HISTORIOGRAPHY One of Tlie
www.senado2010.gob.mx PRE-HISPANIC CENTRAL MEXICAN HISTORIOGRAPHY H. B. NICIIOLSON Los indígenas no sólo de MCnico, sino de toda Mesoamhica, poseían una ver- dadera vocación histórica y relataban y esnibían historia . No me parece justo, después de quemarles a los indios sus historias, declarar que no las escribían. INTRODUCTION One of tlie leading diagnostics of the Mesoamerican Area Co-Tradition was the detailed recording of past events over relatively long time spans. 'í'his "cliroiiiclc conciousness", as 1 have elsewliere (Nicholson 1955b) refcrred to it, was much more fully developed here than in any other aboriginal New World region. Even many Old World cultures assigned to a substantially higlier rung on the ladder of cultural complexity cannot offer historical records nearly as rich or extending over such long periods. Students interested in the historical aspect of WIesoamerican studies Iiave always intensively utilized these native chronicles, but less attention has been directed to the native concepts of history and to transinission media and techniques. In a preliminary paper, deliver- cd orally 9 years ago an published only in brief abstract form (Ni- cholson 1963), 1 hriefly discussed the former aspect. Mesoamerican concepts of history -which would include consideration of why such a strong interest in history fluorished in this are- deserve much more analysis tlian they have yet re~eived.~However: this paper will iiot be concerned with concepts but rather will focus on the methods employed to transmit knowledge of the past aud the kinds of events recorded -its historiography, if you wili- in one Meso- amcrican subarea, Central Mexico. -

Inter·American Tropical Tuna Commission
INTER·AMERICAN TROPICAL TUNA COMMISSION Special Report No.5 ORGANIZATION, FUNCTIONS, AND ACHIEVEMENTS OF THE t INTER-AMERICAN TROPICAL TUNA COMMISSION I ~. t I, ! by i ~ Clifford L. Peterson and William H. Bayliff Ii f I I t La Jolla, California 1985 TABLE OF CONTENTS INTRODUCTION. • 1 AREA COVERED BY THE CONVENTION. 1 SPECIES COVERED BY THE CONVENTION AND SUBSEQUENT INSTRUCTIONS 3 Yellowtin tuna • 3 Skipjack tuna. 3 Northern bluetin tuna. 4 Other tunas. 5 Billtishes 6 Baittishes 6 Dolphins • 7 ORGANIZATION. 7 Membership • 7 Languages. 8 Commissioners. 8 Meetings 8 Chairman and secretary 9 Voting • 9 Director of investigations and statf • 9 Headquarters and field laboratories. 10 Finance. 10 RESEARCH PROGRAM. 11 Fish • 11 Fishery statistics. 12 Biology of tunas and billtishes • 14 Biology ot baittishes • 16 Oceanography and meteorology. 16 Stock assessment. 17 Dolphins • • • 19 Data collection • 19 Population assessment • • 20 Attempts to reduce dolphin mortality. • 21 Interactions between dolphins and tunas • 22 REGULATIONS • 22 INTERGOVERNMENTAL MEETINGS. 26 RELATIONS WITH OTHER ORGANIZATIONS. • 27 International. • 27 National • 27 Intranational • • 28 PUBLICATIONS. • • 29 LITERATURE CITED. • 30 FIGURE. • 31 TABLES. • • • 32 APPENDIX 1. • • 35 APPENDIX 2. • 43 INTRODUCTION The Inter-American Tropical Tuna Commission (IATTC) operates under the authority and direction of a Convention originally entered into by the governments of Costa Rica and the United states. The Convention, which came into force in 1950, is open to the adherence by other governments whose nationals participate in the fisheries for tropical tunas in the eastern Pacific Ocean. The member nations of the Commission now are France. Japan, Nicaragua. Panama, and the United States. -

The Perception and Measurement of Human-Robot Trust
University of Central Florida STARS Electronic Theses and Dissertations, 2004-2019 2013 The Perception And Measurement Of Human-robot Trust Kristin Schaefer University of Central Florida Part of the Psychology Commons Find similar works at: https://stars.library.ucf.edu/etd University of Central Florida Libraries http://library.ucf.edu This Doctoral Dissertation (Open Access) is brought to you for free and open access by STARS. It has been accepted for inclusion in Electronic Theses and Dissertations, 2004-2019 by an authorized administrator of STARS. For more information, please contact [email protected]. STARS Citation Schaefer, Kristin, "The Perception And Measurement Of Human-robot Trust" (2013). Electronic Theses and Dissertations, 2004-2019. 2688. https://stars.library.ucf.edu/etd/2688 THE PERCEPTION AND MEASUREMENT OF HUMAN-ROBOT TRUST by KRISTIN E. SCHAEFER B. A. Susquehanna University, 2003 M. S. University of Central Florida, 2009 A dissertation submitted in fulfillment of the requirements for the degree of Doctor of Philosophy in the Department of Modeling and Simulation in the College of Sciences at the University of Central Florida Orlando, Florida Summer Term 2013 Major Professor: Peter A. Hancock © 2013 Kristin E. Schaefer ii ABSTRACT As robots penetrate further into the everyday environments, trust in these robots becomes a crucial issue. The purpose of this work was to create and validate a reliable scale that could measure changes in an individual’s trust in a robot. Assessment of current trust theory identified measurable antecedents specific to the human, the robot, and the environment. Six experiments subsumed the development of the 40 item trust scale. -

Erika Girdauskaitė ŢMONIŲ REAKCIJA Į ROBOTUS
VYTAUTO DIDŢIOJO UNIVERSITETAS INFORMATIKOS FAKULTETAS TAIKOMOSIOS INFORMATIKOS KATEDRA Erika Girdauskaitė ŢMONIŲ REAKCIJA Į ROBOTUS NAUDOJANT BIO-SIGNALUS IR APKLAUSAS Magistro baigiamasis darbas Taikomosios informatikos studijų programa, valstybinis kodas 621I13003 Informatikos studijų kryptis Vadovas Prof. Tomas Krilavičius _________ __________ (Moksl. laipsnis, vardas, pavardė) (Parašas) (Data) Apginta Doc. Dr. Daiva Vitkutė-Adţgauskienė _________ __________ (Fakulteto dekanas) (Parašas) (Data) Kaunas, 2015 TURINYS SANTRUMPŲ IR TERMINŲ ŢODYNAS .............................................................................................. 3 SANTRAUKA .......................................................................................................................................... 4 ABSTRACT .............................................................................................................................................. 5 1. ĮVADAS............................................................................................................................................ 6 2. ROBOTŲ ANALIZĖS TEORINIAI ASPEKTAI ............................................................................ 8 2.1. Robotų evoliucija ir ateities perspektyvos.................................................................................. 8 2.2. Roboto paţinimo literatūros analizė ........................................................................................... 9 2.3. Robotų sąveikos su ţmonėmis tyrimai .................................................................................... -

A Hybrid Path Tracking Algorithm for Autonomous Navigation in Mobile Industrial Robots
A Low Cost Vision Based Hybrid Fiducial Mark Tracking Technique for Mobile Industrial Robots Mohammed Y Aalsalem1, Wazir Zada Khan 2 and Quratul Ain Arshad3 1 School of Computer Science, University of Jazan Jazan, PoBox # 114, Kingdom of Saudi Arabia [email protected] 2 School of Computer Science, University of Jazan Jazan, PoBox # 114, Kingdom of Saudi Arabia [email protected] 3 School of Computer Science, University of Jazan Jazan, PoBox # 114, Kingdom of Saudi Arabia [email protected] Abstract robots. Robots offer specific benefits to workers, industries and The field of robotic vision is developing rapidly. Robots can react countries. Robots can be used for a wide range of industrial intelligently and provide assistance to user activities through sentient applications as industrial robots are the effective application of computing. Since industrial applications pose complex requirements the modern robotics. If introduced correctly, industrial robots that cannot be handled by humans, an efficient low cost and robust can improve the quality of life by freeing workers from dirty, technique is required for the tracking of mobile industrial robots. The existing sensor based techniques for mobile robot tracking are boring, dangerous and heavy labor. It is true that robots can expensive and complex to deploy, configure and maintain. Also some cause unemployment by replacing human workers, but robots of them demand dedicated and often expensive hardware. This paper also create jobs for robot technicians, salesmen, engineers, presents a low cost vision based technique called “Hybrid Fiducial programmers, and supervisors. Mark Tracking” (HFMT) technique for tracking mobile industrial robot. HFMT technique requires off-the-shelf hardware (CCD An industrial robot is defined by ISO [4] as “an automatically cameras) and printable 2-D circular marks used as fiducials for controlled, reprogrammable, multipurpose manipulator tracking a mobile industrial robot on a pre-defined path. -
Mobile Robotics
Cyber Security Technology ––––––– MOBILE ROBOTICS InNOVATIVE SKILLS AND KNOWLEDGE DEVELOPMENT ISKD Mobile:8979066357,9027669947INNOVATIVE WEB:www.iskd.in SKILLS AND KNOWLEDGE www.facebook.com/iskddoon DEVELOPMENT 7 MOBILE ROBOTICS INDEX Sr Topic Page No No 1 Introduction 2 Classification 3 Mobile Robot Navigation 4 Autonomous Robot 5 Ant Robot 6 Autonomous under water vehicle 7 DARPA LAGR Robot 8 Domestic Robot 9 Humanoid Robot 10 Hexapod Robotics 11 Industrial Robot 12 Mobile Industrial Robot 13 Justin Robot 14 Mobile Manipulator 15 Mobile Wireless Sensor Network 16 Personal Robot 17 Robot 18 Robot Kit and Robot Arm 19 Robotic Mapping 20 Robot Kinematics 21 Robot Jacobian 22 Rover(Space Exploratioin) 23 Ubiquitous Robot 24 Unmanned Aerial Vehicle 25 Wi-Fi INNOVATIVE SKILLS AND KNOWLEDGE DEVELOPMENT 1 MOBILE ROBOTICS Mobile robotics Introduction: "Mobot" redirects here. For the victory pose of distance runner Mo Farah, see Mo Farah § Trademark. A mobile robot is a robot that is capable of locomotion. Mobile robotics is usually considered to be a subfield of robotics and information engineering. A spying robot is an example of a mobile robot capable of movement in a given environment. Mobile robots have the capability to move around in their environment and are not fixed to one physical location. Mobile robots can be "autonomous" (AMR - autonomous mobile robot) which means they are capable of navigating an uncontrolled environment without the need for physical or electro-mechanical guidance devices. Alternatively, mobile robots can rely on guidance devices that allow them to travel a pre-defined navigation route in relatively controlled space (AGV - INNOVATIVE SKILLS AND KNOWLEDGE DEVELOPMENT 2 MOBILE ROBOTICS autonomous guided vehicle).