Pattern Generation and Control of Humanoid Robots: Towards Human-Like Walking Ahmed Chemori
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Humanoid Robot
NAIN 1.0 – A HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Department of Electronics & Communication Engineering Meerut Institute of Engineering & Technology Meerut, U.P. (India)-250005 May, 2018 NAIN 1.0 – HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Submitted to the Department of Electronics & Communication Engineering in partial fulfillment of the requirements for the degree of Bachelor of Technology in Electronics & Communication Meerut Institute of Engineering & Technology, Meerut Dr. A.P.J. Abdul Kalam Technical University, Lucknow May, 2018 DECLARATION I hereby declare that this submission is my own work and that, to the best of my knowledge and belief, it contains no material previously published or written by another person nor material which to a substantial extent has been accepted for the award of any other degree or diploma of the university or other institute of higher learning except where due acknowledgment has been made in the text. Signature Signature Name: Mr. Shivam Shukla Name: Mr. Shashank Bhardwaj Roll No. 1406831124 Roll No. 1406831117 Date: Date: Signature Name: Mr. Shubham Kumar Roll No. 1406831131 Date: ii CERTIFICATE This is to certify that Project Report entitled “Humanoid Robot” which is submitted by Shivam Shukla (1406831124), Shashank Bhardwaj (1406831117), Shubahm Kumar (1406831131) in partial fulfillment of the requirement for the award of degree B.Tech in Department of Electronics & Communication Engineering of Gautam Buddh Technical University (Formerly U.P. Technical University), is record of the candidate own work carried out by him under my/our supervision. The matter embodied in this thesis is original and has not been submitted for the award of any other degree. -

A Whole-Body Model Predictive Control Scheme Including External Contact Forces and Com Height Variations
A Whole-Body Model Predictive Control Scheme Including External Contact Forces and CoM Height Variations Reihaneh Mirjalili1, Aghil Yousefi-koma1, Farzad A. Shirazi2, Arman Nikkhah1, Fatemeh Nazemi1 and Majid Khadiv3 Abstract— In this paper, we present an approach for gener- contacts, these optimization problems in general boil down ating a variety of whole-body motions for a humanoid robot. to a high dimensional non-convex optimization with combi- We extend the available Model Predictive Control (MPC) natorial complexity. As a result, based on the state of the approaches for walking on flat terrain to plan for both vertical motion of the Center of Mass (CoM) and external contact art computational power, these approaches cannot reactively forces consistent with a given task. The optimization problem regenerate motion in a Model Predictive Control (MPC) is comprised of three stages, i. e. the CoM vertical motion, setting. Furthermore, the non-convexity of the problem arises joint angles and contact forces planning. The choice of external the concern of getting stuck in local minima and also the contact (e. g. hand contact with the object or environment) solutions are very sensitive to the initial guess. among all available locations and the appropriate time to reach and maintain a contact are all computed automatically On the contrary to these general approaches, there is a within the algorithm. The presented algorithm benefits from massive amount of effort in the literature to employ model the simplicity of the Linear Inverted Pendulum Model (LIPM), abstraction to regenerate plans fast in face of disturbances while it overcomes the common limitations of this model and [9], [10], [11], [12]. -
The Tip of a Hospitality Revolution (5:48 Mins) Listening Comprehension with Pre-Listening and Post-Listening Exercises Pre-List
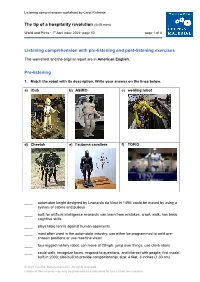
Listening comprehension worksheet by Carol Richards The tip of a hospitality revolution (5:48 mins) World and Press • 1st April issue 2021• page 10 page 1 of 8 Listening comprehension with pre-listening and post-listening exercises This worksheet and the original report are in American English. Pre-listening 1. Match the robot with its description. Write your answer on the lines below. a) iCub b) ASIMO c) welding robot d) Cheetah e) l’automa cavaliere f) TOPIO ____ automaton knight designed by Leonardo da Vinci in 1495; could be moved by using a system of cables and pulleys ____ built for artificial intelligence research; can learn from mistakes, crawl, walk; has basic cognitive skills ____ plays table tennis against human opponents ____ most often used in the automobile industry; can either be programmed to weld pre- chosen positions or use machine vision ____ four-legged military robot, can move at 28mph, jump over things, use climb stairs ____ could walk, recognize faces, respond to questions, and interact with people; first model built in 2000; also built to provide companionship; size: 4 feet, 3 inches (1.30 cm) © 2021 Carl Ed. Schünemann KG. All rights reserved. Copies of this material may only be produced by subscribers for use in their own lessons. The tip of a hospitality revolution World and Press • April 1 / 2021 • page 10 page 2 of 8 2. Vocabulary practice Match the terms on the left with their German meanings on the right. Write your answers in the grid below. a) billion A Abfindung b) competitive advantage B auf etw. -

From Prometheus to Pistorius: a Genaelogy of Physical Ability
FROM PROMETHEUS TO PISTORIUS: A GENAELOGY OF PHYSICAL ABILITY by Stephanie J. Cork A thesis submitted to the Department of Sociology In conformity with the requirements for the degree of Masters of Arts Queen’s University Kingston, Ontario, Canada (September, 2011) Copyright ©Stephanie J. Cork, 2011 Abstract (Fragile Frames + Monstrosities)ModernWar + (Flagged Bodies + Cyborgs)PostmodernWar = dis-AbilityCyborged ii Acknowledgements A huge thank you goes out to: my friends, colleagues, office neighbours, mentors, family, defence committee, readers, editors and Steve. Thank you, also, to the Canadian and American troops as well as Paralympic athletes, Oscar Pistorius and Aimee Mullins for their inspiration, sorry, I have borrowed your stories to perpetuate my own academic success. Thanks also to Louise Bark for her endless patience and kindness, as well as a pint (or three!) at Ben’s Pub. Anne and Wendy and especially Michelle: you are lifesavers! Finally, my eternal gratitude to the: “greatest man alive,” Dr. Rob Beamish (Scott Mason 2011). iii Table of Contents Abstract............................................................................................................................................. i Acknowledgements......................................................................................................................... iii Table of Contents............................................................................................................................ iv Chapter 1: Introduction.....................................................................................................................1 -

Development of Open Platform Humanoid Robot Darwin-OP Inyong Ha*, Yusuke Tamura and Hajime Asama
Advanced Robotics, 2013 http://dx.doi.org/10.1080/01691864.2012.754079 SHORT PAPER Development of open platform humanoid robot DARwIn-OP Inyong Ha*, Yusuke Tamura and Hajime Asama Department of Precision Engineering, The University of Tokyo, 7-3-1, Hongo, Bunkyo-ku, Tokyo 113-8656, Japan (Received 24 January 2012; accepted 27 March 2012) To develop an appropriate research platform, this paper presents the design method for a humanoid which has a net- work-based modular structure and a standard PC architecture. Based on the proposed method, we developed DARwIn- OP which meets the requirements for an open humanoid platform. DARwIn-OP has an expandable system structure, high performance, simple maintenance, familiar development environment and affordable prices. Not only hardware but also software aspects of open humanoid platform are discussed in this paper. Keywords: open platform; humanoid; DARwIn-OP 1. Introduction lution from E series [3]. Then, they opened the first ver- A humanoid robot is a robot that has a general structure sion of ASIMO which walked stably at 1.6 km/h to the of the human body, such as two legs, two arms, a torso, public in 2000 [4]. A new ASIMO was introduced in and a head. Although, some shapes of a humanoid robot 2005 and it could run and walk up and down stairs. Sup- may not be exactly the same as that of a human, a ported by the Ministry of Economics, Commerce and humanoid robot has a basic similar appearance and func- Industry, Japan, the HRP-2 was developed by National tions of a human. -

Desarrollo De Un Objeto Virtual De Aprendizaje Para Los Robots Bioloid Con Finalidad De Aplicaciones En Robótica
DESARROLLO DE UN OBJETO VIRTUAL DE APRENDIZAJE PARA LOS ROBOTS BIOLOID CON FINALIDAD DE APLICACIONES EN ROBÓTICA. INGRID NATALIA RODRIGUEZ OVALLE BRIAN ALEXANDER CHACÓN HERNÁNDEZ UNIVERSIDAD PILOTO DE COLOMBIA PROGRAMA DE INGENIERÍA MECATRÓNICA BOGOTA D.C., COLOMBIA 2017 DESARROLLO DE UN OBJETO VIRTUAL DE APRENDIZAJE PARA LOS ROBOTS BIOLOID CON FINALIDAD DE APLICACIONES EN ROBÓTICA. INGRID NATALIA RODRIGUEZ OVALLE BRIAN ALEXANDER CHACÓN HERNÁNDEZ PROYECTO DE GRADO DIRECTOR: NESTOR FERNANDO PENAGOS QUINTERO UNIVERSIDAD PILOTO DE COLOMBIA PROGRAMA DE INGENIERÍA MECATRÓNICA BOGOTA D.C., COLOMBIA 2017 Nota de aceptación El trabajo de grado, titulado “DESARROLLO DE UN OBJETO VIRTUAL DE APRENDIZAJE PARA LOS ROBOTS BIOLOID CON FINALIDAD DE APLICACIONES EN ROBÓTICA.” elaborado y presentado por los estudiantes Ingrid Natalia Rodriguez Ovalle y Brian Alexander Chacon Hernandez, como requisito parcial para optar al título de Ingeniero/a Mecatrónico/a, cumple el objetivo general y los específicos. Firma del tutor Bogotá, 13 de Febrero de 2017 3 CONTENIDO 1.INTRODUCCIÓN ................................................................................................ 11 1.1 RESUMEN ................................................................................................ 11 1.2 ABSTRACT .................................................................................................. 12 1.1 PLANTEAMIENTO DEL PROBLEMA ..................................................... 12 1.2.1 Antecedentes del problema ................................................................ -

Pdf • Cynthia Breazeal
© copyright by Christoph Bartneck, Tony Belpaeime, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, and Selma Sabanovic 2019. https://www.human-robot-interaction.org Human{Robot Interaction An Introduction Christoph Bartneck, Tony Belpaeme, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, Selma Sabanovi´cˇ This material has been published by Cambridge University Press as Human Robot Interaction by Christoph Bartneck, Tony Belpaeime, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, and Selma Sabanovic. ISBN: 9781108735407 (http://www.cambridge.org/9781108735407). This pre-publication version is free to view and download for personal use only. Not for re-distribution, re-sale or use in derivative works. © copyright by Christoph Bartneck, Tony Belpaeime, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, and Selma Sabanovic 2019. https://www.human-robot-interaction.org This material has been published by Cambridge University Press as Human Robot Interaction by Christoph Bartneck, Tony Belpaeime, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, and Selma Sabanovic. ISBN: 9781108735407 (http://www.cambridge.org/9781108735407). This pre-publication version is free to view and download for personal use only. Not for re-distribution, re-sale or use in derivative works. © copyright by Christoph Bartneck, Tony Belpaeime, Friederike Eyssel, Takayuki Kanda, Merel Keijsers, and Selma Sabanovic 2019. https://www.human-robot-interaction.org Contents List of illustrations viii List of tables xi 1 Introduction 1 1.1 About this book 1 1.2 Christoph -

Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion
TECHNISCHE UNIVERSITÄT MÜNCHEN Lehrstuhl für Angewandte Mechanik Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion Entwurf und Realisierung eines Humanoiden Roboters für Schnelles und Autonomes Laufen Dipl.-Ing. Univ. Sebastian Lohmeier Vollständiger Abdruck der von der Fakultät für Maschinenwesen der Technischen Universität München zur Erlangung des akademischen Grades eines Doktor-Ingenieurs (Dr.-Ing.) genehmigten Dissertation. Vorsitzender: Univ.-Prof. Dr.-Ing. Udo Lindemann Prüfer der Dissertation: 1. Univ.-Prof. Dr.-Ing. habil. Heinz Ulbrich 2. Univ.-Prof. Dr.-Ing. Horst Baier Die Dissertation wurde am 2. Juni 2010 bei der Technischen Universität München eingereicht und durch die Fakultät für Maschinenwesen am 21. Oktober 2010 angenommen. Colophon The original source for this thesis was edited in GNU Emacs and aucTEX, typeset using pdfLATEX in an automated process using GNU make, and output as PDF. The document was compiled with the LATEX 2" class AMdiss (based on the KOMA-Script class scrreprt). AMdiss is part of the AMclasses bundle that was developed by the author for writing term papers, Diploma theses and dissertations at the Institute of Applied Mechanics, Technische Universität München. Photographs and CAD screenshots were processed and enhanced with THE GIMP. Most vector graphics were drawn with CorelDraw X3, exported as Encapsulated PostScript, and edited with psfrag to obtain high-quality labeling. Some smaller and text-heavy graphics (flowcharts, etc.), as well as diagrams were created using PSTricks. The plot raw data were preprocessed with Matlab. In order to use the PostScript- based LATEX packages with pdfLATEX, a toolchain based on pst-pdf and Ghostscript was used. -

Design of a Drone with a Robotic End-Effector
Design of a Drone with a Robotic End-Effector Suhas Varadaramanujan, Sawan Sreenivasa, Praveen Pasupathy, Sukeerth Calastawad, Melissa Morris, Sabri Tosunoglu Department of Mechanical and Materials Engineering Florida International University Miami, Florida 33174 [email protected], [email protected] , [email protected], [email protected], [email protected], [email protected] ABSTRACT example, the widely-used predator drone for military purposes is the MQ-1 by General Atomics which is remote controlled, UAVs The concept presented involves a combination of a quadcopter typically fall into one of six functional categories (i.e. target and drone and an end-effector arm, which is designed with the decoy, reconnaissance, combat, logistics, R&D, civil and capability of lifting and picking fruits from an elevated position. commercial). The inspiration for this concept was obtained from the swarm robots which have an effector arm to pick small cubes, cans to even With the advent of aerial robotics technology, UAVs became more collecting experimental samples as in case of space exploration. sophisticated and led to development of quadcopters which gained The system as per preliminary analysis would contain two popularity as mini-helicopters. A quadcopter, also known as a physically separate components, but linked with a common quadrotor helicopter, is lifted by means of four rotors. In operation, algorithm which includes controlling of the drone’s positions along the quadcopters generally use two pairs of identical fixed pitched with the movement of the arm. propellers; two clockwise (CW) and two counterclockwise (CCW). They use independent variation of the speed of each rotor to achieve Keywords control. -

Ph. D. Thesis Stable Locomotion of Humanoid Robots Based
Ph. D. Thesis Stable locomotion of humanoid robots based on mass concentrated model Author: Mario Ricardo Arbul´uSaavedra Director: Carlos Balaguer Bernaldo de Quiros, Ph. D. Department of System and Automation Engineering Legan´es, October 2008 i Ph. D. Thesis Stable locomotion of humanoid robots based on mass concentrated model Author: Mario Ricardo Arbul´uSaavedra Director: Carlos Balaguer Bernaldo de Quiros, Ph. D. Signature of the board: Signature President Vocal Vocal Vocal Secretary Rating: Legan´es, de de Contents 1 Introduction 1 1.1 HistoryofRobots........................... 2 1.1.1 Industrialrobotsstory. 2 1.1.2 Servicerobots......................... 4 1.1.3 Science fiction and robots currently . 10 1.2 Walkingrobots ............................ 10 1.2.1 Outline ............................ 10 1.2.2 Themes of legged robots . 13 1.2.3 Alternative mechanisms of locomotion: Wheeled robots, tracked robots, active cords . 15 1.3 Why study legged machines? . 20 1.4 What control mechanisms do humans and animals use? . 25 1.5 What are problems of biped control? . 27 1.6 Features and applications of humanoid robots with biped loco- motion................................. 29 1.7 Objectives............................... 30 1.8 Thesiscontents ............................ 33 2 Humanoid robots 35 2.1 Human evolution to biped locomotion, intelligence and bipedalism 36 2.2 Types of researches on humanoid robots . 37 2.3 Main humanoid robot research projects . 38 2.3.1 The Humanoid Robot at Waseda University . 38 2.3.2 Hondarobots......................... 47 2.3.3 TheHRPproject....................... 51 2.4 Other humanoids . 54 2.4.1 The Johnnie project . 54 2.4.2 The Robonaut project . 55 2.4.3 The COG project . -
Proceedings of the 20Th IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS 2020)
Proceedings of the 20th IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS 2020) Table of Contents 1. Welcome Message 2. Conference Committees 2.1 Organizing Committee 2.2 Conference Editorial Board 2.3 RA-Letters Editorial Board 3. Conference Information 3.1 Plenaries 3.2 Workshops 3.3 Worldwide Virtual Lab Tour 3.4 Awards 3.5 Sponsors 4. Technical Program 4.1 Program at a Glance 4.2 Oral Sessions 4.3 Interactive Sessions 1. Welcome Message Dear Attendees! Welcome to Humanoids 2020, the 20th IEEE-RAS International Conference on Humanoid Robots! Originally, we planned to welcome you all in December 2020 in Munich to celebrate with you the 20th anniversary of the Humanoids conference. We had hoped to host all of you in our beautiful city and show you around in our labs and experience our research first hand. The rise of the Corona pandemic required a change of plan. When the Corona pandemic spread across the globe in early 2020, it also had significant effects on the Humanoid robotics research community. Around the time of the original paper deadlines, many humanoids’ researchers worldwide had no or only severely restricted access to their labs. After intensive consultations between the Organizing Committee and the Steering Committee of the IEEE Conference on Humanoid Robots, it was finally decided to postpone the Humanoids 2020 conference for half a year until July 2021. Our main priority in this decision was the safety of our community. By postponing the conference, we were also hoping to be able to conduct Humanoids 2020 as an in-person event. -

Examining the Use of Robots As Teacher Assistants in UAE
Volume 20, 2021 EXAMINING THE USE OF ROBOTS AS TEACHER ASSISTANTS IN UAE CLASSROOMS: TEACHER AND STUDENT PERSPECTIVES Mariam Alhashmi* College of Education, Zayed University, [email protected] Abu Dhabi, UAE Omar Mubin Senior Lecturer in Human Computer [email protected] Interaction, Sydney, Australia Rama Baroud Part-Time Research Assistant [email protected] * Corresponding author ABSTRACT Aim/Purpose This study sought to understand the views of both teachers and students on the usage of humanoid robots as teaching assistants in a specifically Arab context. Background Social robots have in recent times penetrated the educational space. Although prevalent in Asia and some Western regions, the uptake, perception and ac- ceptance of educational robots in the Arab or Emirati region is not known. Methodology A total of 20 children and 5 teachers were randomly selected to comprise the sample for this study, which was a qualitative exploration executed using fo- cus groups after an NAO robot (pronounced now) was deployed in their school for a day of revision sessions. Contribution Where other papers on this topic have largely been based in other countries, this paper, to our knowledge, is the first to examine the potential for the inte- gration of educational robots in the Arab context. Findings The students were generally appreciative of the incorporation of humanoid robots as co-teachers, whereas the teachers were more circumspect, express- ing some concerns and noting a desire to better streamline the process of bringing robots to the classroom. Recommendations We found that the malleability of the robot’s voice played a pivotal role in the for Practitioners acceptability of the robot, and that generally students did well in smaller Accepting Editor Minh Q.