ROBOX-Automated Bipedal Humanoid Robot
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-

A Humanoid Robot
NAIN 1.0 – A HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Department of Electronics & Communication Engineering Meerut Institute of Engineering & Technology Meerut, U.P. (India)-250005 May, 2018 NAIN 1.0 – HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Submitted to the Department of Electronics & Communication Engineering in partial fulfillment of the requirements for the degree of Bachelor of Technology in Electronics & Communication Meerut Institute of Engineering & Technology, Meerut Dr. A.P.J. Abdul Kalam Technical University, Lucknow May, 2018 DECLARATION I hereby declare that this submission is my own work and that, to the best of my knowledge and belief, it contains no material previously published or written by another person nor material which to a substantial extent has been accepted for the award of any other degree or diploma of the university or other institute of higher learning except where due acknowledgment has been made in the text. Signature Signature Name: Mr. Shivam Shukla Name: Mr. Shashank Bhardwaj Roll No. 1406831124 Roll No. 1406831117 Date: Date: Signature Name: Mr. Shubham Kumar Roll No. 1406831131 Date: ii CERTIFICATE This is to certify that Project Report entitled “Humanoid Robot” which is submitted by Shivam Shukla (1406831124), Shashank Bhardwaj (1406831117), Shubahm Kumar (1406831131) in partial fulfillment of the requirement for the award of degree B.Tech in Department of Electronics & Communication Engineering of Gautam Buddh Technical University (Formerly U.P. Technical University), is record of the candidate own work carried out by him under my/our supervision. The matter embodied in this thesis is original and has not been submitted for the award of any other degree. -
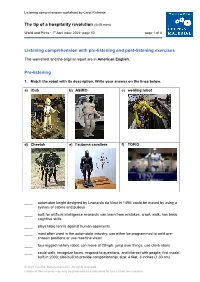
The Tip of a Hospitality Revolution (5:48 Mins) Listening Comprehension with Pre-Listening and Post-Listening Exercises Pre-List
Listening comprehension worksheet by Carol Richards The tip of a hospitality revolution (5:48 mins) World and Press • 1st April issue 2021• page 10 page 1 of 8 Listening comprehension with pre-listening and post-listening exercises This worksheet and the original report are in American English. Pre-listening 1. Match the robot with its description. Write your answer on the lines below. a) iCub b) ASIMO c) welding robot d) Cheetah e) l’automa cavaliere f) TOPIO ____ automaton knight designed by Leonardo da Vinci in 1495; could be moved by using a system of cables and pulleys ____ built for artificial intelligence research; can learn from mistakes, crawl, walk; has basic cognitive skills ____ plays table tennis against human opponents ____ most often used in the automobile industry; can either be programmed to weld pre- chosen positions or use machine vision ____ four-legged military robot, can move at 28mph, jump over things, use climb stairs ____ could walk, recognize faces, respond to questions, and interact with people; first model built in 2000; also built to provide companionship; size: 4 feet, 3 inches (1.30 cm) © 2021 Carl Ed. Schünemann KG. All rights reserved. Copies of this material may only be produced by subscribers for use in their own lessons. The tip of a hospitality revolution World and Press • April 1 / 2021 • page 10 page 2 of 8 2. Vocabulary practice Match the terms on the left with their German meanings on the right. Write your answers in the grid below. a) billion A Abfindung b) competitive advantage B auf etw. -

Design of a Drone with a Robotic End-Effector
Design of a Drone with a Robotic End-Effector Suhas Varadaramanujan, Sawan Sreenivasa, Praveen Pasupathy, Sukeerth Calastawad, Melissa Morris, Sabri Tosunoglu Department of Mechanical and Materials Engineering Florida International University Miami, Florida 33174 [email protected], [email protected] , [email protected], [email protected], [email protected], [email protected] ABSTRACT example, the widely-used predator drone for military purposes is the MQ-1 by General Atomics which is remote controlled, UAVs The concept presented involves a combination of a quadcopter typically fall into one of six functional categories (i.e. target and drone and an end-effector arm, which is designed with the decoy, reconnaissance, combat, logistics, R&D, civil and capability of lifting and picking fruits from an elevated position. commercial). The inspiration for this concept was obtained from the swarm robots which have an effector arm to pick small cubes, cans to even With the advent of aerial robotics technology, UAVs became more collecting experimental samples as in case of space exploration. sophisticated and led to development of quadcopters which gained The system as per preliminary analysis would contain two popularity as mini-helicopters. A quadcopter, also known as a physically separate components, but linked with a common quadrotor helicopter, is lifted by means of four rotors. In operation, algorithm which includes controlling of the drone’s positions along the quadcopters generally use two pairs of identical fixed pitched with the movement of the arm. propellers; two clockwise (CW) and two counterclockwise (CCW). They use independent variation of the speed of each rotor to achieve Keywords control. -

Surveillance Robot Controlled Using an Android App Project Report Submitted in Partial Fulfillment of the Requirements for the Degree Of
Surveillance Robot controlled using an Android app Project Report Submitted in partial fulfillment of the requirements for the degree of Bachelor of Engineering by Shaikh Shoeb Maroof Nasima (Roll No.12CO92) Ansari Asgar Ali Shamshul Haque Shakina (Roll No.12CO106) Khan Sufiyan Liyaqat Ali Kalimunnisa (Roll No.12CO81) Mir Ibrahim Salim Farzana (Roll No.12CO82) Supervisor Prof. Kalpana R. Bodke Co-Supervisor Prof. Amer Syed Department of Computer Engineering, School of Engineering and Technology Anjuman-I-Islam’s Kalsekar Technical Campus Plot No. 2 3, Sector -16, Near Thana Naka, Khanda Gaon, New Panvel, Navi Mumbai. 410206 Academic Year : 2014-2015 CERTIFICATE Department of Computer Engineering, School of Engineering and Technology, Anjuman-I-Islam’s Kalsekar Technical Campus Khanda Gaon,New Panvel, Navi Mumbai. 410206 This is to certify that the project entitled “Surveillance Robot controlled using an Android app” is a bonafide work of Shaikh Shoeb Maroof Nasima (12CO92), Ansari Asgar Ali Shamshul Haque Shakina (12CO106), Khan Sufiyan Liyaqat Ali Kalimunnisa (12CO81), Mir Ibrahim Salim Farzana (12CO82) submitted to the University of Mumbai in partial ful- fillment of the requirement for the award of the degree of “Bachelor of Engineering” in De- partment of Computer Engineering. Prof. Kalpana R. Bodke Prof. Amer Syed Supervisor/Guide Co-Supervisor/Guide Prof. Tabrez Khan Dr. Abdul Razak Honnutagi Head of Department Director Project Approval for Bachelor of Engineering This project I entitled Surveillance robot controlled using an android application by Shaikh Shoeb Maroof Nasima, Ansari Asgar Ali Shamshul Haque Shakina, Mir Ibrahim Salim Farzana,Khan Sufiyan Liyaqat Ali Kalimunnisa is approved for the degree of Bachelor of Engineering in Department of Computer Engineering. -

Communicating Simulated Emotional States of Robots by Expressive Movements
Middlesex University Research Repository An open access repository of Middlesex University research http://eprints.mdx.ac.uk Sial, Sara Baber (2013) Communicating simulated emotional states of robots by expressive movements. Masters thesis, Middlesex University. [Thesis] Final accepted version (with author’s formatting) This version is available at: https://eprints.mdx.ac.uk/12312/ Copyright: Middlesex University Research Repository makes the University’s research available electronically. Copyright and moral rights to this work are retained by the author and/or other copyright owners unless otherwise stated. The work is supplied on the understanding that any use for commercial gain is strictly forbidden. A copy may be downloaded for personal, non-commercial, research or study without prior permission and without charge. Works, including theses and research projects, may not be reproduced in any format or medium, or extensive quotations taken from them, or their content changed in any way, without first obtaining permission in writing from the copyright holder(s). They may not be sold or exploited commercially in any format or medium without the prior written permission of the copyright holder(s). Full bibliographic details must be given when referring to, or quoting from full items including the author’s name, the title of the work, publication details where relevant (place, publisher, date), pag- ination, and for theses or dissertations the awarding institution, the degree type awarded, and the date of the award. If you believe that any material held in the repository infringes copyright law, please contact the Repository Team at Middlesex University via the following email address: [email protected] The item will be removed from the repository while any claim is being investigated. -

PRE-HISPANIC CENTRAL MEXICAN HISTORIOGRAPHY One of Tlie
www.senado2010.gob.mx PRE-HISPANIC CENTRAL MEXICAN HISTORIOGRAPHY H. B. NICIIOLSON Los indígenas no sólo de MCnico, sino de toda Mesoamhica, poseían una ver- dadera vocación histórica y relataban y esnibían historia . No me parece justo, después de quemarles a los indios sus historias, declarar que no las escribían. INTRODUCTION One of tlie leading diagnostics of the Mesoamerican Area Co-Tradition was the detailed recording of past events over relatively long time spans. 'í'his "cliroiiiclc conciousness", as 1 have elsewliere (Nicholson 1955b) refcrred to it, was much more fully developed here than in any other aboriginal New World region. Even many Old World cultures assigned to a substantially higlier rung on the ladder of cultural complexity cannot offer historical records nearly as rich or extending over such long periods. Students interested in the historical aspect of WIesoamerican studies Iiave always intensively utilized these native chronicles, but less attention has been directed to the native concepts of history and to transinission media and techniques. In a preliminary paper, deliver- cd orally 9 years ago an published only in brief abstract form (Ni- cholson 1963), 1 hriefly discussed the former aspect. Mesoamerican concepts of history -which would include consideration of why such a strong interest in history fluorished in this are- deserve much more analysis tlian they have yet re~eived.~However: this paper will iiot be concerned with concepts but rather will focus on the methods employed to transmit knowledge of the past aud the kinds of events recorded -its historiography, if you wili- in one Meso- amcrican subarea, Central Mexico. -

Inter·American Tropical Tuna Commission
INTER·AMERICAN TROPICAL TUNA COMMISSION Special Report No.5 ORGANIZATION, FUNCTIONS, AND ACHIEVEMENTS OF THE t INTER-AMERICAN TROPICAL TUNA COMMISSION I ~. t I, ! by i ~ Clifford L. Peterson and William H. Bayliff Ii f I I t La Jolla, California 1985 TABLE OF CONTENTS INTRODUCTION. • 1 AREA COVERED BY THE CONVENTION. 1 SPECIES COVERED BY THE CONVENTION AND SUBSEQUENT INSTRUCTIONS 3 Yellowtin tuna • 3 Skipjack tuna. 3 Northern bluetin tuna. 4 Other tunas. 5 Billtishes 6 Baittishes 6 Dolphins • 7 ORGANIZATION. 7 Membership • 7 Languages. 8 Commissioners. 8 Meetings 8 Chairman and secretary 9 Voting • 9 Director of investigations and statf • 9 Headquarters and field laboratories. 10 Finance. 10 RESEARCH PROGRAM. 11 Fish • 11 Fishery statistics. 12 Biology of tunas and billtishes • 14 Biology ot baittishes • 16 Oceanography and meteorology. 16 Stock assessment. 17 Dolphins • • • 19 Data collection • 19 Population assessment • • 20 Attempts to reduce dolphin mortality. • 21 Interactions between dolphins and tunas • 22 REGULATIONS • 22 INTERGOVERNMENTAL MEETINGS. 26 RELATIONS WITH OTHER ORGANIZATIONS. • 27 International. • 27 National • 27 Intranational • • 28 PUBLICATIONS. • • 29 LITERATURE CITED. • 30 FIGURE. • 31 TABLES. • • • 32 APPENDIX 1. • • 35 APPENDIX 2. • 43 INTRODUCTION The Inter-American Tropical Tuna Commission (IATTC) operates under the authority and direction of a Convention originally entered into by the governments of Costa Rica and the United states. The Convention, which came into force in 1950, is open to the adherence by other governments whose nationals participate in the fisheries for tropical tunas in the eastern Pacific Ocean. The member nations of the Commission now are France. Japan, Nicaragua. Panama, and the United States. -

The Perception and Measurement of Human-Robot Trust
University of Central Florida STARS Electronic Theses and Dissertations, 2004-2019 2013 The Perception And Measurement Of Human-robot Trust Kristin Schaefer University of Central Florida Part of the Psychology Commons Find similar works at: https://stars.library.ucf.edu/etd University of Central Florida Libraries http://library.ucf.edu This Doctoral Dissertation (Open Access) is brought to you for free and open access by STARS. It has been accepted for inclusion in Electronic Theses and Dissertations, 2004-2019 by an authorized administrator of STARS. For more information, please contact [email protected]. STARS Citation Schaefer, Kristin, "The Perception And Measurement Of Human-robot Trust" (2013). Electronic Theses and Dissertations, 2004-2019. 2688. https://stars.library.ucf.edu/etd/2688 THE PERCEPTION AND MEASUREMENT OF HUMAN-ROBOT TRUST by KRISTIN E. SCHAEFER B. A. Susquehanna University, 2003 M. S. University of Central Florida, 2009 A dissertation submitted in fulfillment of the requirements for the degree of Doctor of Philosophy in the Department of Modeling and Simulation in the College of Sciences at the University of Central Florida Orlando, Florida Summer Term 2013 Major Professor: Peter A. Hancock © 2013 Kristin E. Schaefer ii ABSTRACT As robots penetrate further into the everyday environments, trust in these robots becomes a crucial issue. The purpose of this work was to create and validate a reliable scale that could measure changes in an individual’s trust in a robot. Assessment of current trust theory identified measurable antecedents specific to the human, the robot, and the environment. Six experiments subsumed the development of the 40 item trust scale. -

Erika Girdauskaitė ŢMONIŲ REAKCIJA Į ROBOTUS
VYTAUTO DIDŢIOJO UNIVERSITETAS INFORMATIKOS FAKULTETAS TAIKOMOSIOS INFORMATIKOS KATEDRA Erika Girdauskaitė ŢMONIŲ REAKCIJA Į ROBOTUS NAUDOJANT BIO-SIGNALUS IR APKLAUSAS Magistro baigiamasis darbas Taikomosios informatikos studijų programa, valstybinis kodas 621I13003 Informatikos studijų kryptis Vadovas Prof. Tomas Krilavičius _________ __________ (Moksl. laipsnis, vardas, pavardė) (Parašas) (Data) Apginta Doc. Dr. Daiva Vitkutė-Adţgauskienė _________ __________ (Fakulteto dekanas) (Parašas) (Data) Kaunas, 2015 TURINYS SANTRUMPŲ IR TERMINŲ ŢODYNAS .............................................................................................. 3 SANTRAUKA .......................................................................................................................................... 4 ABSTRACT .............................................................................................................................................. 5 1. ĮVADAS............................................................................................................................................ 6 2. ROBOTŲ ANALIZĖS TEORINIAI ASPEKTAI ............................................................................ 8 2.1. Robotų evoliucija ir ateities perspektyvos.................................................................................. 8 2.2. Roboto paţinimo literatūros analizė ........................................................................................... 9 2.3. Robotų sąveikos su ţmonėmis tyrimai .................................................................................... -

A Hybrid Path Tracking Algorithm for Autonomous Navigation in Mobile Industrial Robots
A Low Cost Vision Based Hybrid Fiducial Mark Tracking Technique for Mobile Industrial Robots Mohammed Y Aalsalem1, Wazir Zada Khan 2 and Quratul Ain Arshad3 1 School of Computer Science, University of Jazan Jazan, PoBox # 114, Kingdom of Saudi Arabia [email protected] 2 School of Computer Science, University of Jazan Jazan, PoBox # 114, Kingdom of Saudi Arabia [email protected] 3 School of Computer Science, University of Jazan Jazan, PoBox # 114, Kingdom of Saudi Arabia [email protected] Abstract robots. Robots offer specific benefits to workers, industries and The field of robotic vision is developing rapidly. Robots can react countries. Robots can be used for a wide range of industrial intelligently and provide assistance to user activities through sentient applications as industrial robots are the effective application of computing. Since industrial applications pose complex requirements the modern robotics. If introduced correctly, industrial robots that cannot be handled by humans, an efficient low cost and robust can improve the quality of life by freeing workers from dirty, technique is required for the tracking of mobile industrial robots. The existing sensor based techniques for mobile robot tracking are boring, dangerous and heavy labor. It is true that robots can expensive and complex to deploy, configure and maintain. Also some cause unemployment by replacing human workers, but robots of them demand dedicated and often expensive hardware. This paper also create jobs for robot technicians, salesmen, engineers, presents a low cost vision based technique called “Hybrid Fiducial programmers, and supervisors. Mark Tracking” (HFMT) technique for tracking mobile industrial robot. HFMT technique requires off-the-shelf hardware (CCD An industrial robot is defined by ISO [4] as “an automatically cameras) and printable 2-D circular marks used as fiducials for controlled, reprogrammable, multipurpose manipulator tracking a mobile industrial robot on a pre-defined path. -
Humanoid Robot NAO: Developing Behaviors for Soccer Humanoid Robots
FACULDADE DE ENGENHARIA DA UNIVERSIDADE DO PORTO Humanoid Robot NAO: Developing Behaviors for Soccer Humanoid Robots Luís Miranda Cruz State of the Art Review Master in Informatics and Computing Engineering Supervisor: Luis Paulo Reis (PhD.) Supervisor: Armando Sousa (PhD.) 12th February, 2011 Abstract The topic of humanoid robot control has driven many research in areas such as robotics, artifi- cial intelligence, computer vision, among others. More and better technologies have been de- veloped, providing a wide range of humanoid robots and simulators which is very useful in this task. Nowadays, humanoids are equipped with several degrees of freedom leading to very versatile movements but also more complexity to the inherent problems. Robocup is a robotic soccer international competition that promotes the research in these areas, including humanoid leagues, both on simulated and real environments. The FCPortugal team has already a good record of wins in RoboCup. The team intends to study these problems due to its participation in these humanoid leagues. In this context, this dissertation proposes the development of automated processes for optimizing behaviours and generate sequences of behaviours for a given task with regard to the environment. This document presents the state of the art of the dissertation, describing different optimiza- tion methods, such as Hill Climbing, Simulated Annealing, Tabu Search and Genetic Algorithms. It also describes the topic of Machine Learning, the planning problems, and AI search methods, such as the greedy best-first search and the A* search algorithms. Humanoid control is introduced, explaining the behaviours at motor, skill and task level, and presenting the work already developed by FCPortugal in behaviours generation, namely the Step-Behaviours, Slot-Behaviours and Cen- tral Pattern Generators. -

Issues and Prospects of Robotization in the Social Field
Advances in Social Science, Education and Humanities Research, volume 240 2nd International Scientific Conference on New Industrialization: Global, National, Regional Dimension (SICNI 2018) Issues and Prospects of Robotization in the Social Field Svetlana Evgenievna Gasumova Lisa Porter Department of Social Work and Conflict Studies and School of Allied Health and Community Department of Information Technologies University of Worcester Perm State National Research University Worcester, UK Perm, Russia [email protected] [email protected] Abstract—The article presents a sociological analysis of Scientists agree that service robots designed to help the first trends in the robotization of the social field. It describes people organize life in various fields, contribute to the the emergence and the beginning of mass distribution of the so- autonomy (that is, increase independence) of individual. This called “service robots” which are intended for use by various is a very important achievement in the history of human social groups in daily activities for the purpose of meeting human civilization and is thought to be a kind of scientific and needs. The article lists their characteristics and raises some ethical issues of the use of robotics in the social area. We also technological revolution. Such robots have the following analyze a threat to life and health due to robotization using the characteristics: first case of the man killed by an unmanned taxi as an example (2018). The first predictive calculations of unemployment rates in mobility, the UK, caused by the use of service robots in the future, are programmability, given. It also characterizes the social significance of the sensors’ availability, functionality of several samples of service robots invented over mechanical abilities, the past 20 years, and the most popular ones in the world.