Nadine Humanoid Social Robotics Platform.Pdf
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Humanoid Robot
NAIN 1.0 – A HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Department of Electronics & Communication Engineering Meerut Institute of Engineering & Technology Meerut, U.P. (India)-250005 May, 2018 NAIN 1.0 – HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Submitted to the Department of Electronics & Communication Engineering in partial fulfillment of the requirements for the degree of Bachelor of Technology in Electronics & Communication Meerut Institute of Engineering & Technology, Meerut Dr. A.P.J. Abdul Kalam Technical University, Lucknow May, 2018 DECLARATION I hereby declare that this submission is my own work and that, to the best of my knowledge and belief, it contains no material previously published or written by another person nor material which to a substantial extent has been accepted for the award of any other degree or diploma of the university or other institute of higher learning except where due acknowledgment has been made in the text. Signature Signature Name: Mr. Shivam Shukla Name: Mr. Shashank Bhardwaj Roll No. 1406831124 Roll No. 1406831117 Date: Date: Signature Name: Mr. Shubham Kumar Roll No. 1406831131 Date: ii CERTIFICATE This is to certify that Project Report entitled “Humanoid Robot” which is submitted by Shivam Shukla (1406831124), Shashank Bhardwaj (1406831117), Shubahm Kumar (1406831131) in partial fulfillment of the requirement for the award of degree B.Tech in Department of Electronics & Communication Engineering of Gautam Buddh Technical University (Formerly U.P. Technical University), is record of the candidate own work carried out by him under my/our supervision. The matter embodied in this thesis is original and has not been submitted for the award of any other degree. -

A Whole-Body Model Predictive Control Scheme Including External Contact Forces and Com Height Variations
A Whole-Body Model Predictive Control Scheme Including External Contact Forces and CoM Height Variations Reihaneh Mirjalili1, Aghil Yousefi-koma1, Farzad A. Shirazi2, Arman Nikkhah1, Fatemeh Nazemi1 and Majid Khadiv3 Abstract— In this paper, we present an approach for gener- contacts, these optimization problems in general boil down ating a variety of whole-body motions for a humanoid robot. to a high dimensional non-convex optimization with combi- We extend the available Model Predictive Control (MPC) natorial complexity. As a result, based on the state of the approaches for walking on flat terrain to plan for both vertical motion of the Center of Mass (CoM) and external contact art computational power, these approaches cannot reactively forces consistent with a given task. The optimization problem regenerate motion in a Model Predictive Control (MPC) is comprised of three stages, i. e. the CoM vertical motion, setting. Furthermore, the non-convexity of the problem arises joint angles and contact forces planning. The choice of external the concern of getting stuck in local minima and also the contact (e. g. hand contact with the object or environment) solutions are very sensitive to the initial guess. among all available locations and the appropriate time to reach and maintain a contact are all computed automatically On the contrary to these general approaches, there is a within the algorithm. The presented algorithm benefits from massive amount of effort in the literature to employ model the simplicity of the Linear Inverted Pendulum Model (LIPM), abstraction to regenerate plans fast in face of disturbances while it overcomes the common limitations of this model and [9], [10], [11], [12]. -
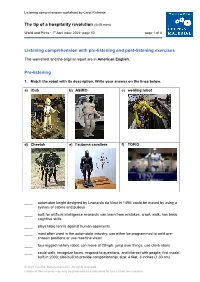
The Tip of a Hospitality Revolution (5:48 Mins) Listening Comprehension with Pre-Listening and Post-Listening Exercises Pre-List
Listening comprehension worksheet by Carol Richards The tip of a hospitality revolution (5:48 mins) World and Press • 1st April issue 2021• page 10 page 1 of 8 Listening comprehension with pre-listening and post-listening exercises This worksheet and the original report are in American English. Pre-listening 1. Match the robot with its description. Write your answer on the lines below. a) iCub b) ASIMO c) welding robot d) Cheetah e) l’automa cavaliere f) TOPIO ____ automaton knight designed by Leonardo da Vinci in 1495; could be moved by using a system of cables and pulleys ____ built for artificial intelligence research; can learn from mistakes, crawl, walk; has basic cognitive skills ____ plays table tennis against human opponents ____ most often used in the automobile industry; can either be programmed to weld pre- chosen positions or use machine vision ____ four-legged military robot, can move at 28mph, jump over things, use climb stairs ____ could walk, recognize faces, respond to questions, and interact with people; first model built in 2000; also built to provide companionship; size: 4 feet, 3 inches (1.30 cm) © 2021 Carl Ed. Schünemann KG. All rights reserved. Copies of this material may only be produced by subscribers for use in their own lessons. The tip of a hospitality revolution World and Press • April 1 / 2021 • page 10 page 2 of 8 2. Vocabulary practice Match the terms on the left with their German meanings on the right. Write your answers in the grid below. a) billion A Abfindung b) competitive advantage B auf etw. -

Desarrollo De Un Objeto Virtual De Aprendizaje Para Los Robots Bioloid Con Finalidad De Aplicaciones En Robótica
DESARROLLO DE UN OBJETO VIRTUAL DE APRENDIZAJE PARA LOS ROBOTS BIOLOID CON FINALIDAD DE APLICACIONES EN ROBÓTICA. INGRID NATALIA RODRIGUEZ OVALLE BRIAN ALEXANDER CHACÓN HERNÁNDEZ UNIVERSIDAD PILOTO DE COLOMBIA PROGRAMA DE INGENIERÍA MECATRÓNICA BOGOTA D.C., COLOMBIA 2017 DESARROLLO DE UN OBJETO VIRTUAL DE APRENDIZAJE PARA LOS ROBOTS BIOLOID CON FINALIDAD DE APLICACIONES EN ROBÓTICA. INGRID NATALIA RODRIGUEZ OVALLE BRIAN ALEXANDER CHACÓN HERNÁNDEZ PROYECTO DE GRADO DIRECTOR: NESTOR FERNANDO PENAGOS QUINTERO UNIVERSIDAD PILOTO DE COLOMBIA PROGRAMA DE INGENIERÍA MECATRÓNICA BOGOTA D.C., COLOMBIA 2017 Nota de aceptación El trabajo de grado, titulado “DESARROLLO DE UN OBJETO VIRTUAL DE APRENDIZAJE PARA LOS ROBOTS BIOLOID CON FINALIDAD DE APLICACIONES EN ROBÓTICA.” elaborado y presentado por los estudiantes Ingrid Natalia Rodriguez Ovalle y Brian Alexander Chacon Hernandez, como requisito parcial para optar al título de Ingeniero/a Mecatrónico/a, cumple el objetivo general y los específicos. Firma del tutor Bogotá, 13 de Febrero de 2017 3 CONTENIDO 1.INTRODUCCIÓN ................................................................................................ 11 1.1 RESUMEN ................................................................................................ 11 1.2 ABSTRACT .................................................................................................. 12 1.1 PLANTEAMIENTO DEL PROBLEMA ..................................................... 12 1.2.1 Antecedentes del problema ................................................................ -

Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion
TECHNISCHE UNIVERSITÄT MÜNCHEN Lehrstuhl für Angewandte Mechanik Design and Realization of a Humanoid Robot for Fast and Autonomous Bipedal Locomotion Entwurf und Realisierung eines Humanoiden Roboters für Schnelles und Autonomes Laufen Dipl.-Ing. Univ. Sebastian Lohmeier Vollständiger Abdruck der von der Fakultät für Maschinenwesen der Technischen Universität München zur Erlangung des akademischen Grades eines Doktor-Ingenieurs (Dr.-Ing.) genehmigten Dissertation. Vorsitzender: Univ.-Prof. Dr.-Ing. Udo Lindemann Prüfer der Dissertation: 1. Univ.-Prof. Dr.-Ing. habil. Heinz Ulbrich 2. Univ.-Prof. Dr.-Ing. Horst Baier Die Dissertation wurde am 2. Juni 2010 bei der Technischen Universität München eingereicht und durch die Fakultät für Maschinenwesen am 21. Oktober 2010 angenommen. Colophon The original source for this thesis was edited in GNU Emacs and aucTEX, typeset using pdfLATEX in an automated process using GNU make, and output as PDF. The document was compiled with the LATEX 2" class AMdiss (based on the KOMA-Script class scrreprt). AMdiss is part of the AMclasses bundle that was developed by the author for writing term papers, Diploma theses and dissertations at the Institute of Applied Mechanics, Technische Universität München. Photographs and CAD screenshots were processed and enhanced with THE GIMP. Most vector graphics were drawn with CorelDraw X3, exported as Encapsulated PostScript, and edited with psfrag to obtain high-quality labeling. Some smaller and text-heavy graphics (flowcharts, etc.), as well as diagrams were created using PSTricks. The plot raw data were preprocessed with Matlab. In order to use the PostScript- based LATEX packages with pdfLATEX, a toolchain based on pst-pdf and Ghostscript was used. -

Design of a Drone with a Robotic End-Effector
Design of a Drone with a Robotic End-Effector Suhas Varadaramanujan, Sawan Sreenivasa, Praveen Pasupathy, Sukeerth Calastawad, Melissa Morris, Sabri Tosunoglu Department of Mechanical and Materials Engineering Florida International University Miami, Florida 33174 [email protected], [email protected] , [email protected], [email protected], [email protected], [email protected] ABSTRACT example, the widely-used predator drone for military purposes is the MQ-1 by General Atomics which is remote controlled, UAVs The concept presented involves a combination of a quadcopter typically fall into one of six functional categories (i.e. target and drone and an end-effector arm, which is designed with the decoy, reconnaissance, combat, logistics, R&D, civil and capability of lifting and picking fruits from an elevated position. commercial). The inspiration for this concept was obtained from the swarm robots which have an effector arm to pick small cubes, cans to even With the advent of aerial robotics technology, UAVs became more collecting experimental samples as in case of space exploration. sophisticated and led to development of quadcopters which gained The system as per preliminary analysis would contain two popularity as mini-helicopters. A quadcopter, also known as a physically separate components, but linked with a common quadrotor helicopter, is lifted by means of four rotors. In operation, algorithm which includes controlling of the drone’s positions along the quadcopters generally use two pairs of identical fixed pitched with the movement of the arm. propellers; two clockwise (CW) and two counterclockwise (CCW). They use independent variation of the speed of each rotor to achieve Keywords control. -
Proceedings of the 20Th IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS 2020)
Proceedings of the 20th IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS 2020) Table of Contents 1. Welcome Message 2. Conference Committees 2.1 Organizing Committee 2.2 Conference Editorial Board 2.3 RA-Letters Editorial Board 3. Conference Information 3.1 Plenaries 3.2 Workshops 3.3 Worldwide Virtual Lab Tour 3.4 Awards 3.5 Sponsors 4. Technical Program 4.1 Program at a Glance 4.2 Oral Sessions 4.3 Interactive Sessions 1. Welcome Message Dear Attendees! Welcome to Humanoids 2020, the 20th IEEE-RAS International Conference on Humanoid Robots! Originally, we planned to welcome you all in December 2020 in Munich to celebrate with you the 20th anniversary of the Humanoids conference. We had hoped to host all of you in our beautiful city and show you around in our labs and experience our research first hand. The rise of the Corona pandemic required a change of plan. When the Corona pandemic spread across the globe in early 2020, it also had significant effects on the Humanoid robotics research community. Around the time of the original paper deadlines, many humanoids’ researchers worldwide had no or only severely restricted access to their labs. After intensive consultations between the Organizing Committee and the Steering Committee of the IEEE Conference on Humanoid Robots, it was finally decided to postpone the Humanoids 2020 conference for half a year until July 2021. Our main priority in this decision was the safety of our community. By postponing the conference, we were also hoping to be able to conduct Humanoids 2020 as an in-person event. -

SBIR Program Document
Topic Index and Description A20-101 Continuous Flow Recrystallization of Energetic Nitramines A20-102 Deep Neural Network Learning Based Tools for Embedded Systems Under Side Channel Attacks A20-103 Beyond Li-Ion Batteries in Electric Vehicles (EV) A20-104 Wireless Power transfer A20-105 Direct Wall Shear Stress Measurement for Rotor Blades A20-106 Electronically-Tunable, Low Loss Microwave Thin-film Ferroelectric Phase-Shifter A20-107 Automated Imagery Annotation and Segmentation for Military Tactical Objects A20-108 Multi-Solution Precision Location Determination System to be Operational in a Global Positioning System (GPS) Denied Environment for Static, Dynamic and Autonomous Systems under Test A20-109 Environmentally Adaptive Free-Space Optical Communication A20-110 Localized High Bandwidth Wireless Secure Mesh Network A20-111 Non-Destructive Evaluation of Bonded Interface of Cold Spray Additive Repair A20-112 Compact, High Performance Engines for Air Launched Effects UAS A20-113 Optical Based Health Usage and Monitoring System (HUMS) A20-114 3-D Microfabrication for In-Plane Optical MEMS Inertial Sensors A20-115 Using Artificial Intelligence to Optimize Missile Sustainment Trade-offs A20-116 Distributed Beamforming for Non-Developmental Waveforms A20-117 Lens Antennas for Resilient Satellite Communications (SATCOM) on Ground Tactical Vehicles A20-118 Novel, Low SWaP-C Unattended Ground Sensors for Relevant SA in A2AD Environments A20-119 Efficient Near Field Charge Transfer Mediated Infrared Detectors A20-120 Very Small Pixel Uncooled -

Surveillance Robot Controlled Using an Android App Project Report Submitted in Partial Fulfillment of the Requirements for the Degree Of
Surveillance Robot controlled using an Android app Project Report Submitted in partial fulfillment of the requirements for the degree of Bachelor of Engineering by Shaikh Shoeb Maroof Nasima (Roll No.12CO92) Ansari Asgar Ali Shamshul Haque Shakina (Roll No.12CO106) Khan Sufiyan Liyaqat Ali Kalimunnisa (Roll No.12CO81) Mir Ibrahim Salim Farzana (Roll No.12CO82) Supervisor Prof. Kalpana R. Bodke Co-Supervisor Prof. Amer Syed Department of Computer Engineering, School of Engineering and Technology Anjuman-I-Islam’s Kalsekar Technical Campus Plot No. 2 3, Sector -16, Near Thana Naka, Khanda Gaon, New Panvel, Navi Mumbai. 410206 Academic Year : 2014-2015 CERTIFICATE Department of Computer Engineering, School of Engineering and Technology, Anjuman-I-Islam’s Kalsekar Technical Campus Khanda Gaon,New Panvel, Navi Mumbai. 410206 This is to certify that the project entitled “Surveillance Robot controlled using an Android app” is a bonafide work of Shaikh Shoeb Maroof Nasima (12CO92), Ansari Asgar Ali Shamshul Haque Shakina (12CO106), Khan Sufiyan Liyaqat Ali Kalimunnisa (12CO81), Mir Ibrahim Salim Farzana (12CO82) submitted to the University of Mumbai in partial ful- fillment of the requirement for the award of the degree of “Bachelor of Engineering” in De- partment of Computer Engineering. Prof. Kalpana R. Bodke Prof. Amer Syed Supervisor/Guide Co-Supervisor/Guide Prof. Tabrez Khan Dr. Abdul Razak Honnutagi Head of Department Director Project Approval for Bachelor of Engineering This project I entitled Surveillance robot controlled using an android application by Shaikh Shoeb Maroof Nasima, Ansari Asgar Ali Shamshul Haque Shakina, Mir Ibrahim Salim Farzana,Khan Sufiyan Liyaqat Ali Kalimunnisa is approved for the degree of Bachelor of Engineering in Department of Computer Engineering. -

Biomimetic Bi-Pedal Humanoid: Design, Actuation, and Control Implementation with Focus on Robotic Legs
Biomimetic Bi-Pedal Humanoid: Design, Actuation, and Control Implementation with Focus on Robotic Legs MICHAEL LOUIS OKYEN Thesis submitted to the faculty of the Virginia Polytechnic Institute and State University in partial fulfillment of the requirements for the degree of Master of Science In Mechanical Engineering Shashank Priya, Chair Steve Southward Alfred Wicks April 5, 2013 Blacksburg, VA Keywords: humanoid, biomimetic, legs, mechatronics, hydraulics Biomimetic Bi-Pedal Humanoid: Design, Actuation, and Control Implementation with Focus on Robotic Legs Michael Louis Okyen ABSTRACT The advancements made in technology over the past several decades have brought the field of humanoid robotics closer to integration into the everyday lives of humans. Despite these advances, the cost of these systems consistently remains high, thus limiting the environments in which these robots can be deployed. In this thesis, a pair of low-cost, bio-mimetic legs for a humanoid robot was developed with 12 degrees of freedom: three at the hip, one at the knee, and two at the ankle. Prior to developing the robot, a survey of the human-sized robotic legs released from 2006-2012 was conducted. The analysis included a summary of the key performance metrics and trends in series of human-sized robots. Recommendations were developed for future data reporting that will allow improved comparison of different prototypes. The design of the new robotic legs in this thesis utilized human anatomy data to devise performance parameters and select actuators. The developed system was able to achieve comparable ROM, size, weight, and torque to a six-foot tall human. Position and zero-moment point sensors were integrated for use in balancing, and a control architecture was developed. -

State of the Art: Bipedal Robots for Lower Limb Rehabilitation
applied sciences Review State of the Art: Bipedal Robots for Lower Limb Rehabilitation Xiong Yang 1,†, Haotian She 2,†, Haojian Lu 1, Toshio Fukuda 2 and Yajing Shen 1,3,* 1 Department of Mechanical and Biomedical Engineering, University of Hong Kong, Tat Chee Avenue, Kowloon, Hong Kong 999077, China; [email protected] (X.Y.); [email protected] (H.L.) 2 Beijing Institute of Technology, No.5 Yard, Zhong Guan Cun South Street, Haidian District, Beijing 100000, China; [email protected] (H.S.); [email protected] (T.F.) 3 Centre for Robotics and Automation, CityU Shenzhen Research Institute, Shenzhen 518000, China * Correspondence: [email protected]; Tel.: +852-3442-2045 † These authors contributed equally to this work. Received: 5 October 2017; Accepted: 3 November 2017; Published: 16 November 2017 Abstract: The bipedal robot is one of the most attractive robots types given its similarity to the locomotion of human beings and its ability to assist people to walk during rehabilitation. This review summarizes the chronological historical development of bipedal robots and introduces some current popular bipedal robots age. Then, the basic theory-stability control and key technology-motion planning of bipedal robots are introduced and analyzed. Bipedal robots have a wide range of applications in the service, education, entertainment, and other industries. After that, we specifically discuss the applications of bipedal robots in lower limb rehabilitation, including wearable exoskeleton robots, rehabilitation equipment, soft exoskeleton robots, and unpowered exoskeleton robots, and their control methods. Lastly, the future development and the challenges in this field are discussed. -

Navigation of Humanoids by a Hybridized Regression-Adaptive Particle Swarm Optimization Approach
10.24425/acs.2018.124707 Archives of Control Sciences Volume 28(LXIV), 2018 No. 3, pages 349–378 Navigation of humanoids by a hybridized regression-adaptive particle swarm optimization approach PRIYADARSHI BIPLAB KUMAR, CHINMAYA SAHU and DAYAL R. PARHI In the era of humanoid robotics, navigation and path planning of humanoids in complex en- vironments have always remained as one of the most promising area of research. In this paper, a novel hybridized navigational controller is proposed using the logic of both classical technique and computational intelligence for path planning of humanoids. The proposed navigational con- troller is a hybridization of regression analysis with adaptive particle swarm optimization. The inputs given to the regression controller are in the forms of obstacle distances, and the output of the regression controller is interim turning angle. The output interim turning angle is again fed to the adaptive particle swarm optimization controller along with other inputs. The output of the adaptive particle swarm optimization controller termed as final turning angle acts as the directing factor for smooth navigation of humanoids in a complex environment. The proposed navigational controller is tested for single as well as multiple humanoids in both simulation and experimental environments. The results obtained from both the environments are compared against each other, and a good agreement between them is observed. Finally, the proposed hy- bridization technique is also tested against other existing navigational approaches for validation of better efficiency. Key words: navigation, humanoid NAO, RA, APSO, Petri-Net, V-REP 1. Introduction With the development of science and technology, robots are becoming an integral part of human life.