Inter·American Tropical Tuna Commission
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Humanoid Robot
NAIN 1.0 – A HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Department of Electronics & Communication Engineering Meerut Institute of Engineering & Technology Meerut, U.P. (India)-250005 May, 2018 NAIN 1.0 – HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Submitted to the Department of Electronics & Communication Engineering in partial fulfillment of the requirements for the degree of Bachelor of Technology in Electronics & Communication Meerut Institute of Engineering & Technology, Meerut Dr. A.P.J. Abdul Kalam Technical University, Lucknow May, 2018 DECLARATION I hereby declare that this submission is my own work and that, to the best of my knowledge and belief, it contains no material previously published or written by another person nor material which to a substantial extent has been accepted for the award of any other degree or diploma of the university or other institute of higher learning except where due acknowledgment has been made in the text. Signature Signature Name: Mr. Shivam Shukla Name: Mr. Shashank Bhardwaj Roll No. 1406831124 Roll No. 1406831117 Date: Date: Signature Name: Mr. Shubham Kumar Roll No. 1406831131 Date: ii CERTIFICATE This is to certify that Project Report entitled “Humanoid Robot” which is submitted by Shivam Shukla (1406831124), Shashank Bhardwaj (1406831117), Shubahm Kumar (1406831131) in partial fulfillment of the requirement for the award of degree B.Tech in Department of Electronics & Communication Engineering of Gautam Buddh Technical University (Formerly U.P. Technical University), is record of the candidate own work carried out by him under my/our supervision. The matter embodied in this thesis is original and has not been submitted for the award of any other degree. -

Global Education Entry Points Into the Curriculum: a Guide for Teacher Librarians
DOCUMENT RESUME ED 415 155 SO 028 109 AUTHOR Blakey, Elaine; Maguire, Gerry; Steward, Kaye TITLE Global Education Entry Points into the Curriculum: A Guide for Teacher Librarians. INSTITUTION Alberta Teachers Association, Edmonton. Learning Resources Council.; Alberta Global Education Project, Edmonton. PUB DATE 1991-00-00 NOTE 74p. AVAILABLE FROM Alberta Global Education Project, 11010 142 Street, Edmonton, Alberta T5N 2R1 Canada. PUB TYPE Guides Non-Classroom (055) EDRS PRICE MF01/PC03 Plus Postage. DESCRIPTORS Elementary Secondary Education; Foreign Countries; *Global Approach; *Global Education; Interdisciplinary Approach; *Justice; *Peace; *Resource Materials; Social Studies; Sustainable Development IDENTIFIERS Alberta ABSTRACT This information packet is useful to teacher-librarians and teachers who would like to integrate global education concepts into existing curricula. The techniques outlined in this document provide strategies for implementing global education integration. The central ideas of the global education package include:(1) interrelatedness;(2) peace;(3) global community;(4) cooperation;(5) distribution and sustainable development; (6) multicultural understanding;(7) human rights;(8) stewardship; (9) empowerment; and (10) social justice. Throughout the packet, ideas are offered for inclusion of global perspectives in language arts, science, mathematics, and social studies. Recommendations are included for purchases of resource materials and cross reference charts for concepts across grades and curriculum areas. (EH) -
The Tip of a Hospitality Revolution (5:48 Mins) Listening Comprehension with Pre-Listening and Post-Listening Exercises Pre-List
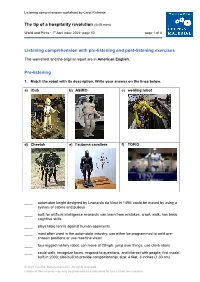
Listening comprehension worksheet by Carol Richards The tip of a hospitality revolution (5:48 mins) World and Press • 1st April issue 2021• page 10 page 1 of 8 Listening comprehension with pre-listening and post-listening exercises This worksheet and the original report are in American English. Pre-listening 1. Match the robot with its description. Write your answer on the lines below. a) iCub b) ASIMO c) welding robot d) Cheetah e) l’automa cavaliere f) TOPIO ____ automaton knight designed by Leonardo da Vinci in 1495; could be moved by using a system of cables and pulleys ____ built for artificial intelligence research; can learn from mistakes, crawl, walk; has basic cognitive skills ____ plays table tennis against human opponents ____ most often used in the automobile industry; can either be programmed to weld pre- chosen positions or use machine vision ____ four-legged military robot, can move at 28mph, jump over things, use climb stairs ____ could walk, recognize faces, respond to questions, and interact with people; first model built in 2000; also built to provide companionship; size: 4 feet, 3 inches (1.30 cm) © 2021 Carl Ed. Schünemann KG. All rights reserved. Copies of this material may only be produced by subscribers for use in their own lessons. The tip of a hospitality revolution World and Press • April 1 / 2021 • page 10 page 2 of 8 2. Vocabulary practice Match the terms on the left with their German meanings on the right. Write your answers in the grid below. a) billion A Abfindung b) competitive advantage B auf etw. -

AI, Robots, and Swarms: Issues, Questions, and Recommended Studies
AI, Robots, and Swarms Issues, Questions, and Recommended Studies Andrew Ilachinski January 2017 Approved for Public Release; Distribution Unlimited. This document contains the best opinion of CNA at the time of issue. It does not necessarily represent the opinion of the sponsor. Distribution Approved for Public Release; Distribution Unlimited. Specific authority: N00014-11-D-0323. Copies of this document can be obtained through the Defense Technical Information Center at www.dtic.mil or contact CNA Document Control and Distribution Section at 703-824-2123. Photography Credits: http://www.darpa.mil/DDM_Gallery/Small_Gremlins_Web.jpg; http://4810-presscdn-0-38.pagely.netdna-cdn.com/wp-content/uploads/2015/01/ Robotics.jpg; http://i.kinja-img.com/gawker-edia/image/upload/18kxb5jw3e01ujpg.jpg Approved by: January 2017 Dr. David A. Broyles Special Activities and Innovation Operations Evaluation Group Copyright © 2017 CNA Abstract The military is on the cusp of a major technological revolution, in which warfare is conducted by unmanned and increasingly autonomous weapon systems. However, unlike the last “sea change,” during the Cold War, when advanced technologies were developed primarily by the Department of Defense (DoD), the key technology enablers today are being developed mostly in the commercial world. This study looks at the state-of-the-art of AI, machine-learning, and robot technologies, and their potential future military implications for autonomous (and semi-autonomous) weapon systems. While no one can predict how AI will evolve or predict its impact on the development of military autonomous systems, it is possible to anticipate many of the conceptual, technical, and operational challenges that DoD will face as it increasingly turns to AI-based technologies. -

Design of a Drone with a Robotic End-Effector
Design of a Drone with a Robotic End-Effector Suhas Varadaramanujan, Sawan Sreenivasa, Praveen Pasupathy, Sukeerth Calastawad, Melissa Morris, Sabri Tosunoglu Department of Mechanical and Materials Engineering Florida International University Miami, Florida 33174 [email protected], [email protected] , [email protected], [email protected], [email protected], [email protected] ABSTRACT example, the widely-used predator drone for military purposes is the MQ-1 by General Atomics which is remote controlled, UAVs The concept presented involves a combination of a quadcopter typically fall into one of six functional categories (i.e. target and drone and an end-effector arm, which is designed with the decoy, reconnaissance, combat, logistics, R&D, civil and capability of lifting and picking fruits from an elevated position. commercial). The inspiration for this concept was obtained from the swarm robots which have an effector arm to pick small cubes, cans to even With the advent of aerial robotics technology, UAVs became more collecting experimental samples as in case of space exploration. sophisticated and led to development of quadcopters which gained The system as per preliminary analysis would contain two popularity as mini-helicopters. A quadcopter, also known as a physically separate components, but linked with a common quadrotor helicopter, is lifted by means of four rotors. In operation, algorithm which includes controlling of the drone’s positions along the quadcopters generally use two pairs of identical fixed pitched with the movement of the arm. propellers; two clockwise (CW) and two counterclockwise (CCW). They use independent variation of the speed of each rotor to achieve Keywords control. -

Surveillance Robot Controlled Using an Android App Project Report Submitted in Partial Fulfillment of the Requirements for the Degree Of
Surveillance Robot controlled using an Android app Project Report Submitted in partial fulfillment of the requirements for the degree of Bachelor of Engineering by Shaikh Shoeb Maroof Nasima (Roll No.12CO92) Ansari Asgar Ali Shamshul Haque Shakina (Roll No.12CO106) Khan Sufiyan Liyaqat Ali Kalimunnisa (Roll No.12CO81) Mir Ibrahim Salim Farzana (Roll No.12CO82) Supervisor Prof. Kalpana R. Bodke Co-Supervisor Prof. Amer Syed Department of Computer Engineering, School of Engineering and Technology Anjuman-I-Islam’s Kalsekar Technical Campus Plot No. 2 3, Sector -16, Near Thana Naka, Khanda Gaon, New Panvel, Navi Mumbai. 410206 Academic Year : 2014-2015 CERTIFICATE Department of Computer Engineering, School of Engineering and Technology, Anjuman-I-Islam’s Kalsekar Technical Campus Khanda Gaon,New Panvel, Navi Mumbai. 410206 This is to certify that the project entitled “Surveillance Robot controlled using an Android app” is a bonafide work of Shaikh Shoeb Maroof Nasima (12CO92), Ansari Asgar Ali Shamshul Haque Shakina (12CO106), Khan Sufiyan Liyaqat Ali Kalimunnisa (12CO81), Mir Ibrahim Salim Farzana (12CO82) submitted to the University of Mumbai in partial ful- fillment of the requirement for the award of the degree of “Bachelor of Engineering” in De- partment of Computer Engineering. Prof. Kalpana R. Bodke Prof. Amer Syed Supervisor/Guide Co-Supervisor/Guide Prof. Tabrez Khan Dr. Abdul Razak Honnutagi Head of Department Director Project Approval for Bachelor of Engineering This project I entitled Surveillance robot controlled using an android application by Shaikh Shoeb Maroof Nasima, Ansari Asgar Ali Shamshul Haque Shakina, Mir Ibrahim Salim Farzana,Khan Sufiyan Liyaqat Ali Kalimunnisa is approved for the degree of Bachelor of Engineering in Department of Computer Engineering. -

SLAM and Vision-Based Humanoid Navigation Olivier Stasse
SLAM and Vision-based Humanoid Navigation Olivier Stasse To cite this version: Olivier Stasse. SLAM and Vision-based Humanoid Navigation. Humanoid Robotics: A Reference, pp.1739-1761, 2018, 978-94-007-6047-9. 10.1007/978-94-007-6046-2_59. hal-01674512 HAL Id: hal-01674512 https://hal.archives-ouvertes.fr/hal-01674512 Submitted on 3 Jan 2018 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. SLAM and Vision-based Humanoid Navigation Olivier STASSE, LAAS-CNRS 1 Motivations In order for humanoid robots to evolve autonomously in a complex environment, they have to perceive it, build an appropriate representation, localize in it and decide which motion to realize. The relationship between the environment and the robot is rather complex as some parts are obstacles to avoid, other possi- ble support for locomotion, or objects to manipulate. The affordance with the objects and the environment may result in quite complex motions ranging from bi-manual manipulation to whole-body motion generation. In this chapter, we will introduce tools to realize vision-based humanoid navigation. The general structure of such a system is depicted in Fig. 1. -

Toward Dynamic and Stable Humanoid Walking That Optimizes Full-Body Motion
Work those Arms: Toward Dynamic and Stable Humanoid Walking that Optimizes Full-Body Motion Christian M. Hubicki1, Ayonga Hereid1, Michael X. Grey2, Andrea L. Thomaz3, and Aaron D. Ames4 Abstract— Humanoid robots are designed with dozens of actuated joints to suit a variety of tasks, but walking controllers rarely make the best use of all of this freedom. We present a framework for maximizing the use of the full humanoid body for the purpose of stable dynamic locomotion, which requires no restriction to a planning template (e.g. LIPM). Using a hybrid zero dynamics (HZD) framework, this approach optimizes a set of outputs which provides requirements for the motion for all actuated links, including arms. These output equations are then rapidly solved by a whole-body inverse-kinematic (IK) solver, providing a set of joint trajectories to the robot. We apply this procedure to a simulation of the humanoid robot, DRC-HUBO, which has over 27 actuators. As a consequence, the resulting gaits swing their arms, not by a user defining swinging motions a priori or superimposing them on gaits post hoc, but as an emergent behavior from optimizing the dynamic gait. We also present preliminary dynamic walking experiments with DRC- HUBO in hardware, thereby building a case that hybrid zero dynamics as augmented by inverse kinematics (HZD+IK) is becoming a viable approach for controlling the full complexity of humanoid locomotion. I. INTRODUCTION Fig. 1: DRC-HUBO, a humanoid robotic platform with 27 Achieving dynamic walking on humanoids is hard; their actuated degrees of freedom from its feet to its wrists. -

Art and Medicine: a Collaborative Project Between Virginia Commonwealth University in Qatar and Weill Cornell Medicine in Qatar Amy J
Virginia Commonwealth University VCU Scholars Compass VCU Libraries Faculty and Staff ubP lications VCU Libraries 2016 Art and Medicine: A Collaborative Project Between Virginia Commonwealth University in Qatar and Weill Cornell Medicine in Qatar Amy J. Andres Virginia Commonwealth University in Qatar, [email protected] Thomas R. Himsworth Virginia Commonwealth University, [email protected] Alan Weber Weill Cornell Medicine, Qatar, [email protected] Stephen Scott Weill Cornell Medicine, Qatar, [email protected] Follow this and additional works at: http://scholarscompass.vcu.edu/libraries_pubs Part of the Interdisciplinary Arts and Media Commons, Medical Education Commons, and the Medical Humanities Commons Recommended Citation Himsworth, R., Andres, A., Weber, A., & Scott, S. (2016). Art and medicine: A collaborative project between Virginia Commonwealth University in Qatar and Weill Cornell Medicine, Qatar. Doha: Virginia Commonwealth University in Qatar. This Book is brought to you for free and open access by the VCU Libraries at VCU Scholars Compass. It has been accepted for inclusion in VCU Libraries Faculty and Staff ubP lications by an authorized administrator of VCU Scholars Compass. For more information, please contact [email protected]. Rhys Himsworth Dr Alan Weber Amy Andres Dr Stephen Scott Noor Al-Thani Habeeb Abu-Futtaim Abdul Rahman Amelie Beicken Art & Mohammad Jawad MEDICINE Emelina Soares A COLLABORATIVE PROJECT BETWEEN Virginia Commonwealth University–Qatar & Weill Cornell Medicine–Qatar Farah -

Robust Door Operation with the Toyota Human Support Robot
! ! ! ! ! ! ! ! ! ! Bachelor Thesis Robust Door Operation with the Toyota Human Support Robot Robotic Perception, Manipulation and Learning Miguel Arduengo García February 2019 Degrees: Grau en Enginyeria en Tecnologies Industrials Grau en Enginyeria Física Advisors: Dr. Luis Sentis Álvarez Dra. Carme Torras Genís Robots are progressively spreading to urban, social and assistive domains. Service robots operating in domestic environments typically face a variety of objects they have to deal with to fulfill their tasks. Some of these objects are articulated such as cabinet doors and drawers. The ability to deal with such objects is relevant, as for example navigate between rooms or assist humans in their mobility. The exploration of this task rises interesting questions in some of the main robotic threads such as perception, manipulation and learning. In this work a general framework to robustly operate different types of doors with a mobile manipulator robot is proposed. To push the state-of-the- art, a novel algorithm, that fuses a Convolutional Neural Network with point cloud processing for estimating the end-effector grasping pose in real-time for multiple handles simultaneously from single RGB-D images, is proposed. Also, a Bayesian framework that embodies the robot with the ability to learn the kinematic model of the door from observations of its motion, as well as from previous experiences or human demonstrations. Combining this probabilistic approach with state-of-the-art motion planning frameworks, such as the Task Space Region, a reliable door and handle detection and subsequent door operation independently of its kinematic model is achieved with the Toyota Human Support Robot (HSR). -
Modeling and Control of Legged Robots
Chapter 48 Modeling and Control of Legged Robots Summary Introduction The promise of legged robots over standard wheeled robots is to provide im- proved mobility over rough terrain. This promise builds on the decoupling between the environment and the main body of the robot that the presence of articulated legs allows, with two consequences. First, the motion of the main body of the robot can be made largely independent from the roughness of the terrain, within the kinematic limits of the legs: legs provide an active suspen- sion system. Indeed, one of the most advanced hexapod robots of the 1980s was aptly called the Adaptive Suspension Vehicle [1]. Second, this decoupling al- lows legs to temporarily leave their contact with the ground: isolated footholds on a discontinuous terrain can be overcome, allowing to visit places absolutely out of reach otherwise. Note that having feet firmly planted on the ground is not mandatory here: skating is an equally interesting option, although rarely approached so far in robotics. Unfortunately, this promise comes at the cost of a hindering increase in complexity. It is only with the unveiling of the Honda P2 humanoid robot in 1996 [2], and later of the Boston Dynamics BigDog quadruped robot in 2005 that legged robots finally began to deliver real-life capabilities that are just beginning to match the long sought animal-like mobility over rough terrain. Not matching yet the capabilities of humans and animals, legged robots do contribute however already to understanding their locomotion, as evidenced by the many fruitful collaborations between robotics and biomechanics researchers. -

Communicating Simulated Emotional States of Robots by Expressive Movements
Middlesex University Research Repository An open access repository of Middlesex University research http://eprints.mdx.ac.uk Sial, Sara Baber (2013) Communicating simulated emotional states of robots by expressive movements. Masters thesis, Middlesex University. [Thesis] Final accepted version (with author’s formatting) This version is available at: https://eprints.mdx.ac.uk/12312/ Copyright: Middlesex University Research Repository makes the University’s research available electronically. Copyright and moral rights to this work are retained by the author and/or other copyright owners unless otherwise stated. The work is supplied on the understanding that any use for commercial gain is strictly forbidden. A copy may be downloaded for personal, non-commercial, research or study without prior permission and without charge. Works, including theses and research projects, may not be reproduced in any format or medium, or extensive quotations taken from them, or their content changed in any way, without first obtaining permission in writing from the copyright holder(s). They may not be sold or exploited commercially in any format or medium without the prior written permission of the copyright holder(s). Full bibliographic details must be given when referring to, or quoting from full items including the author’s name, the title of the work, publication details where relevant (place, publisher, date), pag- ination, and for theses or dissertations the awarding institution, the degree type awarded, and the date of the award. If you believe that any material held in the repository infringes copyright law, please contact the Repository Team at Middlesex University via the following email address: [email protected] The item will be removed from the repository while any claim is being investigated.