Humanoid Robot NAO: Developing Behaviors for Soccer Humanoid Robots
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Humanoid Robot
NAIN 1.0 – A HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Department of Electronics & Communication Engineering Meerut Institute of Engineering & Technology Meerut, U.P. (India)-250005 May, 2018 NAIN 1.0 – HUMANOID ROBOT by Shivam Shukla (1406831124) Shubham Kumar (1406831131) Shashank Bhardwaj (1406831117) Submitted to the Department of Electronics & Communication Engineering in partial fulfillment of the requirements for the degree of Bachelor of Technology in Electronics & Communication Meerut Institute of Engineering & Technology, Meerut Dr. A.P.J. Abdul Kalam Technical University, Lucknow May, 2018 DECLARATION I hereby declare that this submission is my own work and that, to the best of my knowledge and belief, it contains no material previously published or written by another person nor material which to a substantial extent has been accepted for the award of any other degree or diploma of the university or other institute of higher learning except where due acknowledgment has been made in the text. Signature Signature Name: Mr. Shivam Shukla Name: Mr. Shashank Bhardwaj Roll No. 1406831124 Roll No. 1406831117 Date: Date: Signature Name: Mr. Shubham Kumar Roll No. 1406831131 Date: ii CERTIFICATE This is to certify that Project Report entitled “Humanoid Robot” which is submitted by Shivam Shukla (1406831124), Shashank Bhardwaj (1406831117), Shubahm Kumar (1406831131) in partial fulfillment of the requirement for the award of degree B.Tech in Department of Electronics & Communication Engineering of Gautam Buddh Technical University (Formerly U.P. Technical University), is record of the candidate own work carried out by him under my/our supervision. The matter embodied in this thesis is original and has not been submitted for the award of any other degree. -

Task-Space Control Interface for Softbank Humanoid Robots and Its
Task-Space Control Interface for SoftBank Humanoid Robots and its Human-Robot Interaction Applications Anastasia Bolotnikova, Pierre Gergondet, Arnaud Tanguy, Sébastien Courtois, Abderrahmane Kheddar To cite this version: Anastasia Bolotnikova, Pierre Gergondet, Arnaud Tanguy, Sébastien Courtois, Abderrahmane Kheddar. Task-Space Control Interface for SoftBank Humanoid Robots and its Human-Robot Interaction Applications. IEEE/SICE 13th International Symposium on System Integration (SII 2021), Jan 2021, Online conference (originally: Iwaki, Fukushima), Japan. pp.560-565, 10.1109/IEEECONF49454.2021.9382685. hal-02919367v3 HAL Id: hal-02919367 https://hal.archives-ouvertes.fr/hal-02919367v3 Submitted on 8 Oct 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Task-Space Control Interface for SoftBank Humanoid Robots and its Human-Robot Interaction Applications Anastasia Bolotnikova1;2, Pierre Gergondet4, Arnaud Tanguy3,Sebastien´ Courtois1, Abderrahmane Kheddar3;2;4 Abstract— We present an open-source software interface, Real robot called mc naoqi, that allows to perform whole-body task-space Quadratic Programming based control, implemented in mc rtc Fixed frame rate low-level actuator commands Robot sensors readings from framework, on the SoftBank Robotics Europe humanoid robots. Other robot device commands low-level memory fast access We describe the control interface, associated robot description mc_naoqi_dcm packages, robot modules and sample whole-body controllers. -
The Tip of a Hospitality Revolution (5:48 Mins) Listening Comprehension with Pre-Listening and Post-Listening Exercises Pre-List
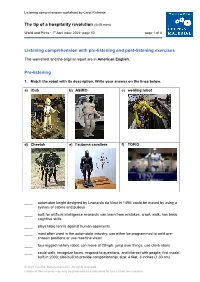
Listening comprehension worksheet by Carol Richards The tip of a hospitality revolution (5:48 mins) World and Press • 1st April issue 2021• page 10 page 1 of 8 Listening comprehension with pre-listening and post-listening exercises This worksheet and the original report are in American English. Pre-listening 1. Match the robot with its description. Write your answer on the lines below. a) iCub b) ASIMO c) welding robot d) Cheetah e) l’automa cavaliere f) TOPIO ____ automaton knight designed by Leonardo da Vinci in 1495; could be moved by using a system of cables and pulleys ____ built for artificial intelligence research; can learn from mistakes, crawl, walk; has basic cognitive skills ____ plays table tennis against human opponents ____ most often used in the automobile industry; can either be programmed to weld pre- chosen positions or use machine vision ____ four-legged military robot, can move at 28mph, jump over things, use climb stairs ____ could walk, recognize faces, respond to questions, and interact with people; first model built in 2000; also built to provide companionship; size: 4 feet, 3 inches (1.30 cm) © 2021 Carl Ed. Schünemann KG. All rights reserved. Copies of this material may only be produced by subscribers for use in their own lessons. The tip of a hospitality revolution World and Press • April 1 / 2021 • page 10 page 2 of 8 2. Vocabulary practice Match the terms on the left with their German meanings on the right. Write your answers in the grid below. a) billion A Abfindung b) competitive advantage B auf etw. -

The Sphingidae (Lepidoptera) of the Philippines
©Entomologischer Verein Apollo e.V. Frankfurt am Main; download unter www.zobodat.at Nachr. entomol. Ver. Apollo, Suppl. 17: 17-132 (1998) 17 The Sphingidae (Lepidoptera) of the Philippines Willem H o g e n e s and Colin G. T r e a d a w a y Willem Hogenes, Zoologisch Museum Amsterdam, Afd. Entomologie, Plantage Middenlaan 64, NL-1018 DH Amsterdam, The Netherlands Colin G. T readaway, Entomologie II, Forschungsinstitut Senckenberg, Senckenberganlage 25, D-60325 Frankfurt am Main, Germany Abstract: This publication covers all Sphingidae known from the Philippines at this time in the form of an annotated checklist. (A concise checklist of the species can be found in Table 4, page 120.) Distribution maps are included as well as 18 colour plates covering all but one species. Where no specimens of a particular spe cies from the Philippines were available to us, illustrations are given of specimens from outside the Philippines. In total we have listed 117 species (with 5 additional subspecies where more than one subspecies of a species exists in the Philippines). Four tables are provided: 1) a breakdown of the number of species and endemic species/subspecies for each subfamily, tribe and genus of Philippine Sphingidae; 2) an evaluation of the number of species as well as endemic species/subspecies per island for the nine largest islands of the Philippines plus one small island group for comparison; 3) an evaluation of the Sphingidae endemicity for each of Vane-Wright’s (1990) faunal regions. From these tables it can be readily deduced that the highest species counts can be encountered on the islands of Palawan (73 species), Luzon (72), Mindanao, Leyte and Negros (62 each). -

Inverse Kinematics at the Anthropomorphic Robots, by a Trigonometric Method
American Journal of Engineering and Applied Sciences Original Research Paper Inverse Kinematics at the Anthropomorphic Robots, by a Trigonometric Method 1Relly Victoria V. Petrescu, 2Raffaella Aversa, 3Bilal Akash, 4Ronald B. Bucinell, 5Juan M. Corchado, 2Antonio Apicella and 1Florian Ion T. Petrescu 1ARoTMM-IFToMM, Bucharest Polytechnic University, Bucharest, (CE), Romania 2Advanced Material Lab, Department of Architecture and Industrial Design, Second University of Naples, 81031 Aversa (CE), Italy 3Dean of School of Graduate Studies and Research, American University of Ras Al Khaimah, UAE 4Union College, USA 5University of Salamanca, Spain Article history Abstract: A robot is a machine especially programmable one through a Received: 03-01-2017 computer capable of performing a complex series of actions in the Revised: 05-01-2017 automatic mode. Robots may be guided by a control device or external Accepted: 27-04-2017 control may be incorporated in the inside. Robots can be built to take human form, but most robots are machines designed to perform a task Corresponding Author: Florian Ion T. Petrescu without taking into account the manner in which it looks. The branch of ARoTMM-IFToMM, the technology which is concerned with the design, construction, Bucharest Polytechnic operation and application of robots, as well as other information systems University, Bucharest, (CE) for their control, the feedback of the touch screen and processing Romania information is quite robotic. These technologies do with automatic Email: [email protected] machine, which may take the place of the people in hazardous environments or manufacturing processes, or looks like people in appearance, behavior and/or cognitive. Many of the robots of today are inspired by nature which contributes to the field of robotics bio-inspired by it. -

AUTONOMOUS NAVIGATION with NAO David Lavy
AUTONOMOUS NAVIGATION WITH NAO David Lavy and Travis Marshall Boston University Department of Electrical and Computer Engineering 8 Saint Mary's Street Boston, MA 02215 www.bu.edu/ece December 9, 2015 Technical Report No. ECE-2015-06 Summary We introduce a navigation system for the humanoid robot NAO that seeks to find a ball, navigate to it, and kick it. The proposed method uses data acquired using the 2 cameras mounted on the robot to estimate the position of the ball with respect to the robot and then to navigate towards it. Our method is also capable of searching for the ball if is not within the robots immediate range of view or if at some point, NAO loses track of it. Variations of this method are currently used by different universities around the world in the international robotic soccer competition called Robocup. This project was completed within EC720 graduate course entitled \Digital Video Processing" at Boston University in the fall of 2015. i Contents 1 Introduction 1 2 Literature Review 1 3 Problem Solution 2 3.1 Find position of the ball . .3 3.2 Positioning the robot facing the ball . 10 3.3 Walking to the ball . 11 3.4 Kicking the ball . 12 4 Implementation 12 4.1 Image Acquisition . 13 4.2 Finding Contours and Circles . 13 4.3 Navigation and kicking for NAO . 13 5 Experimental Results 14 5.1 Ball identification results by method . 14 5.2 Confusion matrices . 14 5.3 Centering NAO to face the ball . 15 6 Conclusion and Future Work 16 7 Appendix 17 7.1 NAO features . -

Design of a Drone with a Robotic End-Effector
Design of a Drone with a Robotic End-Effector Suhas Varadaramanujan, Sawan Sreenivasa, Praveen Pasupathy, Sukeerth Calastawad, Melissa Morris, Sabri Tosunoglu Department of Mechanical and Materials Engineering Florida International University Miami, Florida 33174 [email protected], [email protected] , [email protected], [email protected], [email protected], [email protected] ABSTRACT example, the widely-used predator drone for military purposes is the MQ-1 by General Atomics which is remote controlled, UAVs The concept presented involves a combination of a quadcopter typically fall into one of six functional categories (i.e. target and drone and an end-effector arm, which is designed with the decoy, reconnaissance, combat, logistics, R&D, civil and capability of lifting and picking fruits from an elevated position. commercial). The inspiration for this concept was obtained from the swarm robots which have an effector arm to pick small cubes, cans to even With the advent of aerial robotics technology, UAVs became more collecting experimental samples as in case of space exploration. sophisticated and led to development of quadcopters which gained The system as per preliminary analysis would contain two popularity as mini-helicopters. A quadcopter, also known as a physically separate components, but linked with a common quadrotor helicopter, is lifted by means of four rotors. In operation, algorithm which includes controlling of the drone’s positions along the quadcopters generally use two pairs of identical fixed pitched with the movement of the arm. propellers; two clockwise (CW) and two counterclockwise (CCW). They use independent variation of the speed of each rotor to achieve Keywords control. -

Evaluating the Nao Robot in the Role of Personal Assistant: the Effect of Gender in Robot Performance Evaluation †
Proceedings Evaluating the Nao Robot in the Role of Personal Assistant: The Effect of Gender in Robot Performance Evaluation † Adrian Vega *, Kryscia Ramírez-Benavides, Luis A. Guerrero and Gustavo López Centro de Investigaciones en Tecnologías de la Información y Comunicación, Universidad de Costa Rica, 2060 San José, Costa Rica; [email protected] (K.R.-B.); [email protected] (L.A.G.); [email protected] (G.L.) * Correspondence: [email protected] † Presented at the 13th International Conference on Ubiquitous Computing and Ambient Intelligence UCAmI 2019, Toledo, Spain, 2–5 December 2019. Published: 20 November 2019 Abstract: By using techniques such as the Wizard of Oz (WoZ) and video capture, this paper evaluated the performance of the Nao Robot in the role of a personal assistant, which was valuated alongside the impact of the assigned gender (male/female) in the perceived performance of the robot assistant. Within a sample size of 39 computer sciences students, this study assessed criteria such as: perceived enjoyment, intention to use, perceived sociability, trust, intelligence, animacy, anthropomorphism, and sympathy, utilizing testing tools such as Unified Theory of Acceptance and Use of Technology (UTAUT) and Godspeed Questionnaire (GSQ). These methods identified a significant effect of the gender assigned to the robot in variables such as intelligence and sympathy. Keywords: human–robot interaction; HRI; HCI; UTAUT; GSQ; WoZ; gender 1. Introduction Starting as manufacturing machines, robots have opened to a wider application of areas such as education [1–3], personal assistance [4], health [5,6], and many others. Multiple research studies have described different elements to consider in the design of interactions with socially intelligent robots [6–9]. -

Examining the Use of Robots As Teacher Assistants in UAE
Volume 20, 2021 EXAMINING THE USE OF ROBOTS AS TEACHER ASSISTANTS IN UAE CLASSROOMS: TEACHER AND STUDENT PERSPECTIVES Mariam Alhashmi* College of Education, Zayed University, [email protected] Abu Dhabi, UAE Omar Mubin Senior Lecturer in Human Computer [email protected] Interaction, Sydney, Australia Rama Baroud Part-Time Research Assistant [email protected] * Corresponding author ABSTRACT Aim/Purpose This study sought to understand the views of both teachers and students on the usage of humanoid robots as teaching assistants in a specifically Arab context. Background Social robots have in recent times penetrated the educational space. Although prevalent in Asia and some Western regions, the uptake, perception and ac- ceptance of educational robots in the Arab or Emirati region is not known. Methodology A total of 20 children and 5 teachers were randomly selected to comprise the sample for this study, which was a qualitative exploration executed using fo- cus groups after an NAO robot (pronounced now) was deployed in their school for a day of revision sessions. Contribution Where other papers on this topic have largely been based in other countries, this paper, to our knowledge, is the first to examine the potential for the inte- gration of educational robots in the Arab context. Findings The students were generally appreciative of the incorporation of humanoid robots as co-teachers, whereas the teachers were more circumspect, express- ing some concerns and noting a desire to better streamline the process of bringing robots to the classroom. Recommendations We found that the malleability of the robot’s voice played a pivotal role in the for Practitioners acceptability of the robot, and that generally students did well in smaller Accepting Editor Minh Q. -

Advance Your Students Into the Future Secondary Education
ADVANCE YOUR STUDENTS INTO THE FUTURE SECONDARY EDUCATION www.active-robots.com/aldebaran STEP INTO THE FUTURE CLASSROOM Robotics is the fastest growing industry and most advanced technology used in education and research. The NAO humanoid robot is the ideal platform for MOTIVATE STUDENTS teaching or researching in Science and Technology. — IMPROVE LEARNING By using our NAO robotics platform, instructors and researchers EFFECTIVENESS stay current with major technical and commercial breakthroughs in — TEACH A JOB-CREATING FIELD programming and applied research. WHY STUDY A HUMANOID ROBOT? MAJOR INNOVATION MULTIDISCIPLINARY PLATFORM ROBOT & JOB-CREATING FIELD FOR TEACHING & RESEARCH FASCINATION — — — After Computer and Internet, Robotics is the new Computer sciences, mechanics, electronics, Humanoid robots have always fascinated people technological revolution. With ageing population and control are already at the core of the NAO especially students with new applications and and labour shortage, humanoid robots will be platform. Our curriculum used in conjunction incredible inventions. Now technology has made one of the solutions for people assistance thanks with NAO allows students to develop a structured a huge leap forward. Stemming from 6 years to their humanoid shape adapted to a world approach to finding solutions and adapting a wide of research, NAO is one of the most advanced made for humans. Educate students today using range of cross-sectional educational content. One humanoid robots ever created. He is fully the NAO platform for opportunities in robotics, example is for the instructor to assign students programmable, open and autonomous. engineering, computer science and technology. In to program NAO to grasp an object and lift it. -

Surveillance Robot Controlled Using an Android App Project Report Submitted in Partial Fulfillment of the Requirements for the Degree Of
Surveillance Robot controlled using an Android app Project Report Submitted in partial fulfillment of the requirements for the degree of Bachelor of Engineering by Shaikh Shoeb Maroof Nasima (Roll No.12CO92) Ansari Asgar Ali Shamshul Haque Shakina (Roll No.12CO106) Khan Sufiyan Liyaqat Ali Kalimunnisa (Roll No.12CO81) Mir Ibrahim Salim Farzana (Roll No.12CO82) Supervisor Prof. Kalpana R. Bodke Co-Supervisor Prof. Amer Syed Department of Computer Engineering, School of Engineering and Technology Anjuman-I-Islam’s Kalsekar Technical Campus Plot No. 2 3, Sector -16, Near Thana Naka, Khanda Gaon, New Panvel, Navi Mumbai. 410206 Academic Year : 2014-2015 CERTIFICATE Department of Computer Engineering, School of Engineering and Technology, Anjuman-I-Islam’s Kalsekar Technical Campus Khanda Gaon,New Panvel, Navi Mumbai. 410206 This is to certify that the project entitled “Surveillance Robot controlled using an Android app” is a bonafide work of Shaikh Shoeb Maroof Nasima (12CO92), Ansari Asgar Ali Shamshul Haque Shakina (12CO106), Khan Sufiyan Liyaqat Ali Kalimunnisa (12CO81), Mir Ibrahim Salim Farzana (12CO82) submitted to the University of Mumbai in partial ful- fillment of the requirement for the award of the degree of “Bachelor of Engineering” in De- partment of Computer Engineering. Prof. Kalpana R. Bodke Prof. Amer Syed Supervisor/Guide Co-Supervisor/Guide Prof. Tabrez Khan Dr. Abdul Razak Honnutagi Head of Department Director Project Approval for Bachelor of Engineering This project I entitled Surveillance robot controlled using an android application by Shaikh Shoeb Maroof Nasima, Ansari Asgar Ali Shamshul Haque Shakina, Mir Ibrahim Salim Farzana,Khan Sufiyan Liyaqat Ali Kalimunnisa is approved for the degree of Bachelor of Engineering in Department of Computer Engineering. -

Humanoid Navigation and Heavy Load Transportation in a Cluttered Environment Antoine Rioux, Wael Suleiman
Humanoid navigation and heavy load transportation in a cluttered environment Antoine Rioux, Wael Suleiman To cite this version: Antoine Rioux, Wael Suleiman. Humanoid navigation and heavy load transportation in a cluttered environment. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Sep 2015, Hambourg, Germany. pp.2180-2186, 10.1109/IROS.2015.7353669. hal-01521584 HAL Id: hal-01521584 https://hal.archives-ouvertes.fr/hal-01521584 Submitted on 12 May 2017 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Humanoid Navigation and Heavy Load Transportation in a Cluttered Environment Antoine Rioux and Wael Suleiman Abstract— Although in recent years several studies aimed at the navigation of robots in cluttered environments, just a few have addressed the problem of robots navigating while moving a large or heavy object. This is especially useful when transporting loads with variable weights and shapes without having to change the robot hardware. On one hand, a major advantage of using a humanoid robot to move an object is that it has arms to firmly grasp it and control it. On the other hand, humanoid robots tend to have higher drift than their wheeled counterparts as well as having significant lateral swing while walking, which propagates to anything they carry.