VLSI – Design of Integrated Circuits Prof. Dr. Dr. H.C. Mult. M. Glesner
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
ECE 546 Lecture -20 Power Distribution Networks
ECE 546 Lecture ‐20 Power Distribution Networks Spring 2020 Jose E. Schutt-Aine Electrical & Computer Engineering University of Illinois [email protected] ECE 546 – Jose Schutt‐Aine 1 IC on Package ECE 546 – Jose Schutt‐Aine 2 IC on Package ECE 546 – Jose Schutt‐Aine 3 Power-Supply Noise - Power-supply-level fluctuations - Delta-I noise - Simultaneous switching noise (SSN) - Ground bounce VOH Ideal Actual VOL Vout Vout Time 4 ECE 546 – Jose Schutt‐Aine 4 Voltage Fluctuations • Voltage fluctuations can cause the following Reduction in voltage across power supply terminals. May prevent devices from switching Increase in voltage across power supply terminalsreliability problems Leakage of the voltage fluctuation into transistors Timing errors, power supply noise, delta‐I noise, simultaneous switching noise (SSN) ECE 546 – Jose Schutt‐Aine 5 Power-Supply-Level Fluctuations • Total capacitive load associated with an IC increases as minimum feature size shrinks • Average current needed to charge capacitance increases • Rate of change of current (dI/dt) also increases • Total chip current may change by large amounts within short periods of time • Fluctuation at the power supply level due to self inductance in distribution lines ECE 546 – Jose Schutt‐Aine 6 Reducing Power-Supply-Level Fluctuations Minimize dI/dt noise • Decoupling capacitors • Multiple power & ground pins • Taylored driver turn-on characteristics Decoupling capacitors • Large capacitor charges up during steady state • Assumes role of power supply during current switching • Leads -
Introduction to ASIC Design
’14EC770 : ASIC DESIGN’ An Introduction Application - Specific Integrated Circuit Dr.K.Kalyani AP, ECE, TCE. 1 VLSI COMPANIES IN INDIA • Motorola India – IC design center • Texas Instruments – IC design center in Bangalore • VLSI India – ASIC design and FPGA services • VLSI Software – Design of electronic design automation tools • Microchip Technology – Offers VLSI CMOS semiconductor components for embedded systems • Delsoft – Electronic design automation, digital video technology and VLSI design services • Horizon Semiconductors – ASIC, VLSI and IC design training • Bit Mapper – Design, development & training • Calorex Institute of Technology – Courses in VLSI chip design, DSP and Verilog HDL • ControlNet India – VLSI design, network monitoring products and services • E Infochips – ASIC chip design, embedded systems and software development • EDAIndia – Resource on VLSI design centres and tutorials • Cypress Semiconductor – US semiconductor major Cypress has set up a VLSI development center in Bangalore • VDAT 2000 – Info on VLSI design and test workshops 2 VLSI COMPANIES IN INDIA • Sandeepani – VLSI design training courses • Sanyo LSI Technology – Semiconductor design centre of Sanyo Electronics • Semiconductor Complex – Manufacturer of microelectronics equipment like VLSIs & VLSI based systems & sub systems • Sequence Design – Provider of electronic design automation tools • Trident Techlabs – Power systems analysis software and electrical machine design services • VEDA IIT – Offers courses & training in VLSI design & development • Zensonet Technologies – VLSI IC design firm eg3.com – Useful links for the design engineer • Analog Devices India Product Development Center – Designs DSPs in Bangalore • CG-CoreEl Programmable Solutions – Design services in telecommunications, networking and DSP 3 Physical Design, CAD Tools. • SiCore Systems Pvt. Ltd. 161, Greams Road, ... • Silicon Automation Systems (India) Pvt. Ltd. ( SASI) ... • Tata Elxsi Ltd. -

SRAM Read/Write Margin Enhancements Using Finfets
IEEE TRANSACTIONS ON VERY LARGE SCALE INTEGRATION (VLSI) SYSTEMS, VOL. 18, NO. 6, JUNE 2010 887 SRAM Read/Write Margin Enhancements Using FinFETs Andrew Carlson, Member, IEEE, Zheng Guo, Student Member, IEEE, Sriram Balasubramanian, Member, IEEE, Radu Zlatanovici, Member, IEEE, Tsu-Jae King Liu, Fellow, IEEE, and Borivoje Nikolic´, Senior Member, IEEE Abstract—Process-induced variations and sub-threshold [1]. Accurate control is essential for high read stability. Sim- leakage in bulk-Si technology limit the scaling of SRAM into ilarly, variability and device leakage affect the writeability of the sub-32 nm nodes. New device architectures are being considered cell. To maintain both desired writeability and read stability of to improve control and reduce short channel effects. Among the SRAM arrays, several radical departures from the conven- the likely candidates, FinFETs are the most attractive option be- cause of their good scalability and possibilities for further SRAM tional design have been considered as follows. performance and yield enhancement through independent gating. 1) Scaling of the traditional six-transistor (6-T) SRAM cell The enhancements to read/write margins and yield are investi- at a slower pace, since a transistor with a larger area is gated in detail for two cell designs employing independently gated more immune to variations. This is a common approach FinFETs. It is shown that FinFET-based 6-T SRAM cells designed in 65- and 45-nm technology nodes; while it still might with pass-gate feedback (PGFB) achieve significant improvements in the cell read stability without area penalty. The write-ability of be applicable to small arrays in future, it fundamentally the cell can be improved through the use of pull-up write gating undermines the objective of technology scaling. -
Stuck-At Fault As a Logic Fault
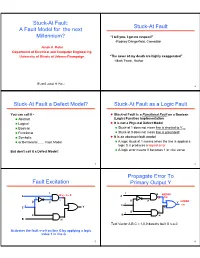
Stuck-At Fault: Stuck-At Fault A Fault Model for the next Millennium? “I tell you, I get no respect!” -Rodney Dangerfield, Comedian Janak H. Patel Department of Electrical and Computer Engineering University of Illinois at Urbana-Champaign “The news of my death are highly exaggerated” -Mark Twain, Author © 2005 Janak H. Patel 2 Stuck-At Fault a Defect Model? Stuck-At Fault as a Logic Fault You can call it - z Stuck-at Fault is a Functional Fault on a Boolean Abstract (Logic) Function Implementation Logical z It is not a Physical Defect Model Boolean Stuck-at 1 does not mean line is shorted to VDD Functional Stuck-at 0 does not mean line is grounded! Symbolic z It is an abstract fault model or Behavioral …... Fault Model A logic stuck-at 1 means when the line is applied a logic 0, it produces a logical error But don’t call it a Defect Model! A logic error means 0 becomes 1 or vice versa 3 4 Propagate Error To Fault Excitation Primary Output Y 1 1 G ERROR A G s - a - 0 A 0 1 x X 1/0 D 1 D F ERROR F 0 Y 0 C 1/0 C Y 0 0 0 E E B H B H Test Vector A,B,C = 1,0,0 detects fault G s-a-0 Activates the fault s-a-0 on line G by applying a logic value 1 in line G 5 6 Unmodeled Defect Detection Defect Sites z Internal to a Logic Gate or Cell Other Logic Transistor Defects – Stuck-On, Stuck-Open, Leakage, Shorts between treminals ERROR Defect G ERROR z External to a Gate or Cell Interconnect Defects – Shorts and Opens D 1 F 0 Y ERROR C 0 0 0 E B H G I 7 8 Defects in Physical Cells Fault Modeling z Physical z Electrical Physical Cells such as NAND, NOR, XNOR, AOI, OAI, MUX2, etc. -

Design and Implementation of 4 Bit Carry Skip Adder Using Nmos and Pmos Transmission Gate
EasyChair Preprint № 2561 Design and Implementation of 4 Bit Carry Skip Adder Using Nmos and Pmos Transmission Gate Ashutosh Pandey, Harshit Singh, Vivek Kumar Chaubey and Utkarsh Jaiswal EasyChair preprints are intended for rapid dissemination of research results and are integrated with the rest of EasyChair. February 5, 2020 CHAPTER-1 INTRODUCTION In the field of electronics, a digital circuit that performs addition of numbers is called an adder or summer. In various kinds of processors like computers, adders have many applications in the arithmetic logic units, as well as in other parts, where these are used to compute table indices, addresses and similar operations. Mostly, the common adders operate on binary numbers, but they can also be constructed for many other numerical representations, such as excess-3 or binary coded decimal (BCD). It is insignificant to customize the adder into an adder-subtractor unit in situations where negative numbers are represented by one's or two's complement. The usage of power efficient VLSI circuits is required to satiate the perennial need for mobile electronic devices. The calculations in these devices ought to be performed using area efficient and low power circuits working at higher speed. The most elementary arithmetic operation is addition; and the most basic arithmetic component of the processor is the adder. Depending upon the delay, area and power consumption requirements; certain adder implementations such as ripple carry, carry-skip, carry select and carry look ahead are available. When large bit numbers are used, the ripple carry adder (RCA) is not very efficient. With the bit length, there is a linear increase in delay. -

High Performance Ripple Carry Adder Using Domino
International Research Journal of Engineering and Technology (IRJET) e-ISSN: 2395 -0056 Volume: 02 Issue: 08 | Nov-2015 www.irjet.net p-ISSN: 2395-0072 HIGH PERFORMANCE RIPPLE CARRY ADDER USING DOMINO LOGIC Dr.J.Karpagam1 , A.Arunadevi2 1 Professor, Department of ECE, KPRIET, Coimbatore, Tamilnadu, India 2 PG Scholar, Department of ECE, KPRIET, Coimbatore, Tamilnadu, India ---------------------------------------------------------------------***--------------------------------------------------------------------- ABSTRACT excessively with a mixer of dynamic and static circuit styles, use of dual supply voltages and dual threshold The demand and popularity of portable electronics is voltages. driving designers to strive for small silicon area, higher speeds, low power dissipation and reliability. Domino logic Domino logic is a clocked logic family which means that circuits are important as it provides better speed and has every single logic gate has a clock signal present. When the lesser transistor requirement when compared to static clock signal turns low, node N0 goes high, causing the CMOS logic circuits. This project presents the design and output of the gate to go low. This represents the only performance of 8-bit Ripple Carry Adder using CMOS mechanism for the gate output to go low once it has been Domino logic targeting at full-custom high speed driven high. The operating period of the cell when its input applications. The constant delay characteristic of this logic clock and output are low is called the recharge phase or style regardless of the logic expression makes it suitable for cycle. The next phase, when the clock is high, is called the implementing complicated logic expression such as addition. evaluate phase or cycle. -

Advanced MOSFET Designs and Implications for SRAM Scaling
Advanced MOSFET Designs and Implications for SRAM Scaling By Changhwan Shin A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Engineering - Electrical Engineering and Computer Sciences in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Tsu-Jae King Liu, Chair Professor Borivoje Nikolić Professor Eugene E. Haller Spring 2011 Advanced MOSFET Designs and Implications for SRAM Scaling Copyright © 2011 by Changhwan Shin Abstract Advanced MOSFET Designs and Implications for SRAM Scaling by Changhwan Shin Doctor of Philosophy in Engineering – Electrical Engineering and Computer Sciences University of California, Berkeley Professor Tsu-Jae King Liu, Chair Continued planar bulk MOSFET scaling is becoming increasingly difficult due to increased random variation in transistor performance with decreasing gate length, and thereby scaling of SRAM using minimum-size transistors is further challenging. This dissertation will discuss various advanced MOSFET designs and their benefits for extending density and voltage scaling of static memory (SRAM) arrays. Using three- dimensional (3-D) process and design simulations, transistor designs are optimized. Then, using an analytical compact model calibrated to the simulated transistor current-vs.-voltage characteristics, the performance and yield of six-transistor (6-T) SRAM cells are estimated. For a given cell area, fully depleted silicon-on-insulator (FD-SOI) MOSFET technology is projected to provide for significantly improved yield across a wide range of operating voltages, as compared with conventional planar bulk CMOS technology. Quasi-Planar (QP) bulk silicon MOSFETs are a lower-cost alternative and also can provide for improved SRAM yield. A more printable "notchless" QP bulk SRAM cell layout is proposed to reduce lithographic variations, and is projected to achieve six-sigma yield (required for terabit-scale SRAM arrays) with a minimum operating voltage below 1 Volt. -

A Study on High-Frequency Performance in Mosfets Scaling
Doctorial Thesis A Study on High-Frequency Performance in MOSFETs Scaling Hiroshi Shimomura March, 2011 Supervisor: Prof. Hiroshi Iwai A Study on High-Frequency Performance in MOSFETs Scaling Contents Contents Ⅰ List of Figures Ⅵ List of Tables ⅩⅤ Chapter.1 Introduction – Background and Motivation of This Study 1.1 Field Effect Transistor Technology 2 1.2 Performance Trends of RF Transistors 5 1.3 Objective and Organization of This Study 11 References 15 Chapter.2 RF Measurement and Characterization 2.1 Introduction 31 2.2 AC S-parameter Measurements 2.2.1 De-embedding Techniques using The OPEN 31 and The SHORT Dummy Device I A Study on High-Frequency Performance in MOSFETs Scaling 2.2.2 Cutoff Frequency, fT 35 2.2.3 Maximum Oscillation Frequency, fmax 36 2.3 Noise Characterization 2.3.1 Noise De-embedding Procedure 39 2.3.2 Noise Parameter Extraction Theory 44 2.4 Large-Signal Measurements 49 2.5 Distortion 50 References 52 Chapter.3 A Mesh-Arrayed MOSFET (MA-MOS) for High-Frequency Analog Applications 3.1 Introduction 55 3.2 Device Configuration and Parasitic Components 55 3.3 AC Characteristics 62 3.4 Conclusion 65 References 66 II A Study on High-Frequency Performance in MOSFETs Scaling Chapter.4 Analysis of RF Characteristics as Scaling MOSFETs from 150 nm to 65 nm Nodes 4.1 Introduction 69 4.2 Methodology and Experimental Procedures 70 4.3 Small Signal and Noise Characteristics 4.3.1 Cut-off frequency :fT and Maximum Oscillation Frequency: fmax 74 4.3.2 Noise Figure: NFmin 79 4.3.3 Intrinsic Gain: gm/gds 84 4.4 Large Signal and Distortion Characteristics 4.4.1 Power-Added Efficiency: PAE and Associated Gain: Ga 86 4.4.2 1dB Compression Point: P1dB 89 4.4.3 Third Order Intercept Point: IP3 91 4.5 Conclusion 95 References 97 Chapter.5 Effect of High Frequency Noise Current Sources on Noise Figure for Sub-50 nm node MOSFETs 5.1 Introduction 103 III A Study on High-Frequency Performance in MOSFETs Scaling 5.2 Noise Theory 5.2.1. -

Chapter 6 - Combinational Logic Systems GCSE Electronics – Component 1: Discovering Electronics
Chapter 6 - Combinational logic systems GCSE Electronics – Component 1: Discovering Electronics Combinational logic systems Learners should be able to: (a) recognise 1/0 as two-state logic levels (b) identify and use NOT gates and 2-input AND, OR, NAND and NOR gates, singly and in combination (c) produce a suitable truth table from a given system specification and for a given logic circuit (d) use truth tables to analyse a system of gates (e) use Boolean algebra to represent the output of truth tables or logic gates and use the basic Boolean identities A.B = A+B and A+B = A.B (f) design processing systems consisting of logic gates to solve problems (g) simplify logic circuits using NAND gate redundancy (h) analyse and design systems from a given truth table to solve a given problem (i) use data sheets to select a logic IC for given applications and to identify pin connections (j) design and use switches and pull-up or pull-down resistors to provide correct logic level/edge-triggered signals for logic gates and timing circuits 180 © WJEC 2017 Chapter 6 - Combinational logic systems GCSE Electronics – Component 1: Discovering Electronics Introduction In this chapter we will be concentrating on the basics of digital logic circuits which will then be extended in Component 2. We should start by ensuring that you understand the difference between a digital signal and an analogue signal. An analogue signal Voltage (V) Max This is a signal that can have any value between the zero and maximum of the power supply. Changes between values can occur slowly or rapidly depending on the system involved. -

(12) United States Patent (1O) Patent No.: US 7,489,538 B2 Mari Et Al
mu uuuu ui iiui iiui mu mil uui uui lull uui uuii uu uii mi (12) United States Patent (1o) Patent No.: US 7,489,538 B2 Mari et al. (45) Date of Patent: Feb. 10, 2009 (54) RADIATION TOLERANT COMBINATIONAL 5,406,513 A * 4/1995 Canafis et al . .............. 365/181 LOGIC CELL (Continued) (75) Inventors: Gary R. Maki, Post Falls, ID (US); OTHER PUBLICATIONS Jody W. Gambles, Post Falls, ID (US); Sterling Whitaker, Albuquerque, NM "Ionizing Radiation Effects in MOS Devices and Circuits", Edited by (US) T.P. Ma., Department of Electrical Engineering, Yale University, New Haven Connecticut and Paul V. Dressendorfer, Sandia National (73) Assignee: University of Idaho, Moscow, ID (US) Laboratories, Albuquerque, NM, A Wiley-Interscience Publication, John Wiley & Sons, pp. 484-589. (*) Notice: Subject to any disclaimer, the term of this (Continued) patent is extended or adjusted under 35 U.S.C. 154(b) by 263 days. Primary Examiner Vu A Le (74) Attorney, Agent, or Firm Haverstock & Owens LLP (21) Appl. No.: 11/527,375 (57) ABSTRACT (22) Filed: Sep. 25, 2006 A system has a reduced sensitivity to Single Event Upset (65) Prior Publication Data and/or Single Event Transient(s) compared to traditional logic devices. In a particular embodiment, the system US 2007/0109865 Al May 17, 2007 includes an input, a logic block, a bias stage, a state machine, and an output. The logic block is coupled to the input. The Related U.S. Application Data logic block is for implementing a logic function, receiving a (60) Provisional application No. 60/736,979, filed on Nov. -

A Constant Delay Logic Style - an Alternative Way of Logic Design
A Constant Delay Logic Style - An Alternative Way of Logic Design by Pierce I-Jen Chuang A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree of Master of Applied Science in Electrical and Computer Engineering Waterloo, Ontario, Canada, 2010 c Pierce I-Jen Chuang 2010 I hereby declare that I am the sole author of this thesis. This is a true copy of the thesis, including any required final revisions, as accepted by my examiners. I understand that my thesis may be made electronically available to the public. ii Abstract High performance, energy efficient logic style has always been a popular research topic in the field of very large scale integrated (VLSI) circuits because of the continuous demands of ever increasing circuit operating frequency. The invention of the dynamic logic in the 80s is one of the answers to this request as it allows designers to implement high per- formance circuit block, i.e., arithmetic logic unit (ALU), at an operating frequency that traditional static and pass transistor CMOS logic styles are difficult to achieve. However, the performance enhancement comes with several costs, including reduced noise margin, charge-sharing noise, and higher power dissipation due to higher data activity. Further- more, dynamic logic has gradually lost its performance advantage over static logic due to the increased self-loading ratio in deep-submicron technology (65nm and below) because of the additional NMOS CLK footer transistor. Because of dynamic logic's limitations and diminished speed reward, a slowly rising need has emerged in the past decade to explore new logic style that goes beyond dynamic logic. -

Logic Families
Logic Families PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Mon, 11 Aug 2014 22:42:35 UTC Contents Articles Logic family 1 Resistor–transistor logic 7 Diode–transistor logic 10 Emitter-coupled logic 11 Gunning transceiver logic 16 Transistor–transistor logic 16 PMOS logic 23 NMOS logic 24 CMOS 25 BiCMOS 33 Integrated injection logic 34 7400 series 35 List of 7400 series integrated circuits 41 4000 series 62 List of 4000 series integrated circuits 69 References Article Sources and Contributors 75 Image Sources, Licenses and Contributors 76 Article Licenses License 77 Logic family 1 Logic family In computer engineering, a logic family may refer to one of two related concepts. A logic family of monolithic digital integrated circuit devices is a group of electronic logic gates constructed using one of several different designs, usually with compatible logic levels and power supply characteristics within a family. Many logic families were produced as individual components, each containing one or a few related basic logical functions, which could be used as "building-blocks" to create systems or as so-called "glue" to interconnect more complex integrated circuits. A "logic family" may also refer to a set of techniques used to implement logic within VLSI integrated circuits such as central processors, memories, or other complex functions. Some such logic families use static techniques to minimize design complexity. Other such logic families, such as domino logic, use clocked dynamic techniques to minimize size, power consumption, and delay. Before the widespread use of integrated circuits, various solid-state and vacuum-tube logic systems were used but these were never as standardized and interoperable as the integrated-circuit devices.