Extrinsic and Intrinsic Index Finger Muscle Attachments in an Opensim Upper- Extremity Model Jong Hwa Lee, Deanna S. Asakawa, J
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Signs to Help the Deaf Included in This Packet
Signs to help the Deaf Included in this packet: Medical Signs Color Signs People Signs This is made by: Deanna Zander, I am a parent of a deaf son. Here is my email address: [email protected], if you have any questions, please email your question, Please put in the Subject box- RE: Medical Signs. For more information, or to obtain a hospital kit for Deaf or Hard of Hearing, please contact Pam Smith, Adult Outreach Coordinator @ 701-665-4401 Medical Signs (Medicine) Medical Medicine- Tip of bent middle finger rubs circle on left palm Sign- Palm-out indexes circle Signs alternately Made By: Deanna Zander Hi, Hello, Howdy Good-Bye, Yes, Yep Bye Right “S” hand & head nods (both head & hand nod) No, Nope Flat hand, Touch forehead, Just wave First two fingers close onto move forward slightly right thumb, & shake your head Appointment Schedule Fingertips of the right palm- out “5” draws down left palm; then turn palm-in & draws across palm The right “S” hand palm down, is postitioned above the left “S” hand, also palm- down. The right hand circels above the left in a clockwise manner & is brought on the back of left hand. Your Name, My Name Birthday My, Mine- Your- The right middle finger touches the chin, Palm of flat Vertical flat palm moves then moves down to touch the chest hand on chest toward person Fingerspell- The right hand, palm- out, is move left to right, fingers wiggling up & Name- Right “H” touches left “H” at right angles MM/DD/YYYY down Call, phone Left “Y” hand, thumb near ear, little finger near mouth The upturned thumbs -

Birth Cont R Ol Fact Sheet
VAGINAL RING FACT SHEET What is the Vaginal Ring (Nuvaring®)? The Vaginal Ring is a clear, flexible, thin, plastic ring that you place in the vagina where it stays for one cycle providing a continuous low dose of 2 hormones (estrogen and progestin). It prevents pregnancy by stopping the release of an egg (ovulation), thickening the cervical fluid, and changing the lining of the uterus. How effective is the Vaginal Ring? The ring is a very effective method of birth control. The ring is about 93% effective at preventing pregnancy in typical use, which means that around 7 out of 100 people who use it as their only form of birth control will get pregnant in one year. With consistent and correct use as described in this fact sheet, it can be over 99% effective. How can I get the Vaginal Ring? You can visit a clinic to get the ring or a prescription for it and talk with a healthcare provider about whether the ring is right for you. Advantages of the Vaginal Ring Disadvantages of the Vaginal Ring Periods may be more predictable/regular and lighter Must remember to remove and replace the ring once a Less period cramping month Decreased symptoms of Premenstrual Syndrome Some users may experience mild side effects such as: (PMS) and perimenopause spotting, nausea, breast tenderness, headaches, or Can be used to skip or shorten your periods dizziness (usually these improve in the first few months Less anemia/iron deficiency caused by heavy periods of use) Does not affect your ability to get pregnant in the Possibility of high blood pressure -

Hand Gestures
L2/16-308 More hand gestures To: UTC From: Peter Edberg, Emoji Subcommittee Date: 2016-10-31 Proposed characters Tier 1: Two often-requested signs (ILY, Shaka, ILY), and three to complete the finger-counting sets for 1-3 (North American and European system). None of these are known to have offensive connotations. HAND SIGN SHAKA ● Shaka sign ● ASL sign for letter ‘Y’ ● Can signify “Aloha spirit”, surfing, “hang loose” ● On Emojipedia top requests list, but requests have dropped off ● 90°-rotated version of CALL ME HAND, but EmojiXpress has received requests for SHAKA specifically, noting that CALL ME HAND does not fulfill need HAND SIGN ILY ● ASL sign for “I love you” (combines signs for I, L, Y), has moved into mainstream use ● On Emojipedia top requests list HAND WITH THUMB AND INDEX FINGER EXTENDED ● Finger-counting 2, European style ● ASL sign for letter ‘L’ ● Sign for “loser” ● In Montenegro, sign for the Liberal party ● In Philippines, sign used by supporters of Corazon Aquino ● See Wikipedia entry HAND WITH THUMB AND FIRST TWO FINGERS EXTENDED ● Finger-counting 3, European style ● UAE: Win, victory, love = work ethic, success, love of nation (see separate proposal L2/16-071, which is the source of the information below about this gesture, and also the source of the images at left) ● Representation for Ctrl-Alt-Del on Windows systems ● Serbian “три прста” (tri prsta), symbol of Serbian identity ● Germanic “Schwurhand”, sign for swearing an oath ● Indication in sports of successful 3-point shot (basketball), 3 successive goals (soccer), etc. HAND WITH FIRST THREE FINGERS EXTENDED ● Finger-counting 3, North American style ● ASL sign for letter ‘W’ ● Scout sign (Boy/Girl Scouts) is similar, has fingers together Tier 2: Complete the finger-counting sets for 4-5, plus some less-requested hand signs. -

Consonants Name of Sound Verbal Cue Other Cues
CONSONANTS NAME OF SOUND VERBAL CUE OTHER CUES “p” sound Popping sound “Where’s your pop?” Fill cheeks up with air “You forgot your and blow out with the pop.” sound, feeling wind on hand “b” sound Popping sound “Where’s your pop?” Fill cheeks up with air “You forgot your and blow out with the pop.” sound “m” sound Humming sound “Close you mouth and Lips together and hum hummmm.:” Touch to feel vibration “n “ sound Buzzing teeth or “Teeth together and Finger on clenched buzzing tongue sound buzz.” teeth to feel vibration “t” sound Tippy sound “Use your tippy.” Index finger to center of spot above upper lip “d” sound Tippy sound “Use your tippy.” Index finger to center of spot above upper lip “h” sound Open mouth windy “Where’s your wind?” Open palm of hand up sound “I didn’t feel your just in front of your wind.” mouth to feel wind “k” sound Throaty sound “Where’s your Index finger pointed throaty?” to throat “g” sound Throaty sound “Where’s your Index finger pointed throaty?” to throat “f” sound Biting lip windy “You forgot to bite Bite lower lip with sound your lip.” “You upper teeth and blow forgot your wind.” wind “v” sound Biting lip windy “You forgot to bite Bite lower lip with sound your lip.” “You upper teeth and blow forgot your wind.” wind Initial “s” sound Smiley windy sound “Smile and make Smile with teeth some wind.” “Keep together and blow those teeth together.” wind Final sounds Sticky sounds “Where’s your Same as above for sticky?” most but for “s” move forearm form left to right starting with an open hand and moving to a closed hand “z” sound Buzzing windy sound “Use your buzz.” Teeth together and blow wind “sh”sound Fat and fluffy sound “Make it fat and Lips out and puckered fluffy.” while blowing out Copyright David W Hammer, MA CCC-SLP Special thanks to Mary Ann Migitsch for her contribution to this chart. -

Palm Reading
Palm Reading Also known as palmistry or chiromancy, palm reading is practiced all over the world with roots in Indian astrology and gypsy fortune-telling. The objective is to evaluate a person’s character and aspects of their life by studying the palm of their hand. There is no substantiate evidence of correlation between palm features and psychological traits; palm reading is for entertainment purposes. Getting Started Which hand to read? There are two main practices: For males, the left hand is what you’re born with, and the right is what you’ve accumulated throughout your life. For females, it’s the opposite. Your dominant hand (the hand you use most often) determines your future and your other, non-dominant hand, is used to determine the past or hidden traits Take these into consideration when choosing which hand to read. Reading the Primary Lines of your Hand 1. Interpret the Heart Line This line is believed to indicate emotional stability, romantic perspectives, depression, and cardiac health. Begins below the index finger = content with love life Begins below the middle finger = selfish when it comes to love Begins in-between the middle and index fingers = caring and understanding Is straight and short = less interest in romance Touches life line = heart is broken easily Is long and curvy = freely expresses emotions and feelings Is straight and parallel to the head line = good handle on emotions Is wavy = many relationships, absence of serious relationships Circle on the line = sad or depressed Broken line = emotional trauma 2. Examine the Head Line This line represents learning style, communication style, intellectualism, and thirst for knowledge. -
ASL) Visual Reference Library
American Sign Language (ASL) Visual Reference Library Important, everyday Swagelok terms and phrases, and how to sign them. Swagelok Visual Reference Library 2 About the Swagelok American Sign Language (ASL) Visual Reference Library At Swagelok, we believe in providing a work environment rooted in the values of continuous improvement and mutual respect among every supervisor and associate. We believe that clear communication and teamwork are critical to meeting those goals. And we are committed to ensuring that all associates, across our sites, have the tools they need to converse and work together successfully. The Swagelok American Sign Language (ASL) Visual Reference Library is one of those tools. Swagelok employs associates with hearing loss or who are hearing impaired whose primary means of communication is through American Sign Language. This document exists to record signs of a variety of important, Swagelok-specific terms and phrases that have been identified by the associates and team members who use them the most: our hearing impaired associates, their peers, and supervisors. Each definition includes written and visual signing instructions, as well as a link to a video of the sign being performed by our own associate, Alvin Waggy. We hope you will use this tool to foster clear, consistent communication among all Swagelok associates, now and in the future. Table of Contents Click to view entry. Actuator ______________ 3 First Aid ______________ 12 Moving Negative ______ 20 Staking ______________ 29 Assembly _____________ 3 First -
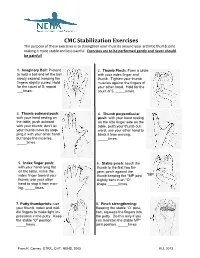
CMC Stabilization Exercises the Purpose of These Exercises Is to Strengthen Your Muscles Around Your Arthritic Thumb Joint Making It More Stable and Less Painful
CMC Stabilization Exercises The purpose of these exercises is to strengthen your muscles around your arthritic thumb joint making it more stable and less painful. Exercises are to be performed gently and never should be painful! 1. Imaginary Ball: Pretend 2. Thumb Pinch: Form a circle to hold a ball and let the ball with your index finger and slowly expand, keeping the thumb. Tighten your thumb fingers slightly curled. Hold muscles against the fingers of for the count of 5, repeat your other hand. Hold for the ___times. count of 5, _____times. 3. Thumb outward push: 4. Thumb perpendicular with your hand resting on push: with your hand resting the table, push outward on the little finger side on the with your thumb; don’t let table, push your thumb out- your thumb move by stop- ward; use your other hand to ping it with your other hand block it from moving. but tense the muscles. _____times. _____times. 5. Index finger push: 6. Stable pinch: touch the with your hand lying flat thumb to the first two fin- on the table, move the gers; pinch against the index finger toward your thumb keeping the *MP joint *MP thumb; use your other slightly bent in an “O” hand to stop it from mov- shape. _____times. ing. _____times. 7. Putty thumbprints: use 8. Pinch strengthening: your thumb, index and mid- Keeping the stable “O” posi- dle fingers to make light im- tion, squeeze the fingers into pressions in the putty. Keep the putty. Do this only if you the stable “O” position. -
The Pelvic Floor Muscles - a Guide for Women This Booklet Is Supported by Wellbeing of Women Registered Charity No
The Pelvic Floor Muscles - a Guide for Women This booklet is supported by Wellbeing of Women Registered Charity No. 239281 www.wellbeingofwomen.org.uk Introduction Up to a third of all women experience a problem with their pelvic floor muscles at some time during their life. The most common problems are leaking with activity, sneezing or coughing (stress urinary incontinence) and pelvic organ prolapse (a feeling of something coming down in the vagina). All the bladder, bowel and sexual functions require good pelvic floor muscles. Effective pelvic floor muscles in pregnancy will reduce the risk of postnatal stress urinary incontinence (SUI). Bowel Uterus Bladder Pubic Bone Tailbone Pelvic floor muscles Vagina Urethra The pelvic floor muscles lie across the base of your pelvis to help keep the pelvic organs - bladder, uterus and bowel - in the correct position. The muscles are held in place by ligaments that support the organs especially when there is an increase of pressure in the abdomen that occurs with lifting, bending, carrying and straining. This is called intra-abdominal pressure and when it increases the pelvic floor and abdominal muscles brace so that the internal organs such as the uterus and bladder are not pushed downwards. The pelvic floor muscles work to help keep the bladder and bowel openings closed to prevent unwanted leakage (incontinence) and they relax to 1 allow easy bladder and bowel emptying. Good pelvic floor muscles can help with sex by improving the vaginal sensation and your ability to grip. Your pelvic floor muscles are important in posture and with the abdominal muscles help to support your spine. -

Self Range of Motion Exercises for Arm and Hand
Self-Range of Motion Exercises for the Arm and Hand After a stroke, it is important to do the exercises in this handout for your affected arm and hand. You can do them on your own by using your unaffected arm and hand. These gentle movements are called “self-range of motion” exercises, and they help to maintain your movement, prevent stiffness, improve blood flow, and increase awareness of your affected arm and hand. Complete the exercises slowly and do not force movements. Stop if you feel pain. If you have any questions or concerns, please contact your Occupational Therapist: _______________________________ Do the exercises in this handout _____ times each day. Page - 1 Self-range of motion exercises for the arm and hand 1. Shoulder: Forward Arm Lift Interlock your fingers, or hold your wrist. With your elbows straight and thumbs facing the ceiling, lift your arms to shoulder height. Slowly lower your arms to starting position. Hold for ____ seconds. Repeat ____ times. Page - 2 Self-range of motion exercises for the arm and hand 2. Shoulder: “Rock the Baby” Stretch Hold your affected arm by supporting the elbow, forearm and wrist (as if cradling a baby). Slowly move your arms to the side, away from your body, lifting to shoulder height. Repeat this motion in the other direction. Slowly rock your arms side-to-side, and keep your body from turning. Repeat ____ times. Page - 3 Self-range of motion exercises for the arm and hand 3. Shoulder: Rotation Stretch Interlock your fingers, or hold your wrist. With your elbows bent at 90 degrees, keep your affected arm at your side. -
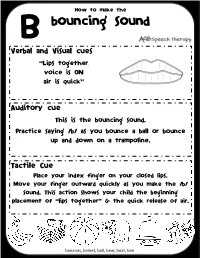
Bouncing Sound
How to make the B bouncing sound Verbal and Visual cues “Lips together, voice is ON air is quick” Auditory cue This is the bouncing sound. Practice saying /b/ as you bounce a ball or bounce up and down on a trampoline. Tactile Cue Place your index finger on your closed lips. Move your finger outward quickly as you make the /b/ sound. This action shows your child the beginning placement of “lips together” & the quick release of air. bananas, basket, ball, bear, boat, bee How to make the CH choo-choo sound Verbal and Visual cues “Lips are apart but close, and may be rounded tongue is behind front teeth, voice is OFF, air is quick” Auditory cue This is the choo-choo sound. Practice saying CH as you push a train on the tracks. Tactile Cue Place your hands on either side of your mouth and expand your fingers as you make the CH sound. This action shows your child the beginning placement of lips close and the & the quick release of air. chair, chart, cheese, chilly, peach, beach How to make the d drumming sound Verbal and Visual cues “Lips apart, tongue is up, front Voice is ON sound is quick” Auditory cue This is the drumming sound. Practice saying /d/ as you pound out a rhythm on a drum. Tactile Cue Place your index finger in the center of your lips, just under your nose. Move your finger outward quickly as you make the /d/ sound. This action shows your child the tongue placement & the quick release of sound. -

Finger Size Does Matter… in Sports Grant Tomkinson University of North Dakota, [email protected]
University of North Dakota UND Scholarly Commons Education, Health & Behavior Studies Faculty Department of Education, Health & Behavior Publications Studies 9-4-2017 Finger size does matter… in sports Grant Tomkinson University of North Dakota, [email protected] Makailah Dyer Follow this and additional works at: https://commons.und.edu/ehb-fac Part of the Health and Physical Education Commons Recommended Citation Tomkinson, Grant and Dyer, Makailah, "Finger size does matter… in sports" (2017). Education, Health & Behavior Studies Faculty Publications. 23. https://commons.und.edu/ehb-fac/23 This News Article is brought to you for free and open access by the Department of Education, Health & Behavior Studies at UND Scholarly Commons. It has been accepted for inclusion in Education, Health & Behavior Studies Faculty Publications by an authorized administrator of UND Scholarly Commons. For more information, please contact [email protected]. Finger size does matter… in sports Grant Tomkinson, Makailah Dyer Examine your fingers. Which is longer? Is it the index finger (the finger you use to point with – technically the second digit, or 2D, counting the thumb), or the ring finger (the fourth digit, or 4D)? The relative length of the index and ring fingers is known as the digit ratio or the 2D:4D. For example, if your index finger is 2.9 inches (or 7.4 cm) long, and your ring finger is 3.1 inches (or 7.9 cm) long, your digit ratio is 0.935 (i.e., 2.9/3.1 or 7.4/7.9). Males typically have lower digit ratios (the ring finger in males is typically longer than the index finger) than females (the fingers are about the same length in females). -

Appendix F – Supplementary Materials
APPENDIX F PATHWAYS TO HIGH ADHERENCE Supplementary Materials PATHWAYS TO HIGH ADHERENCE • AN ADHERENCE SUPPORT MANUAL FOR VAGINAL RING TRIALS APPENDIX F: SUPPLEMENTARY MATERIALS 157157157 PATHWAYS TO HIGH ADHERENCE • AN ADHERENCE SUPPORT MANUAL FOR VAGINAL RING TRIALS PATHWAYS TO HIGH ADHERENCE • AN ADHERENCE SUPPORT MANUAL FOR VAGINAL RING TRIALS 158 APPENDIX F: SUPPLEMENTARY MATERIALS APPENDIX F: SUPPLEMENTARY MATERIALS 159 WHAT YOU WILL FIND IN THIS APPENDIX Appendix F contains an instructional sheet provided to IPM-027/The Ring Study participants to help them know how to insert the ring and what to do if a ring came out of the vagina between visits. WHO SHOULD USE IT Study team members, especially counselors, who will be working one-on-one with participants to help them learn about how to properly insert the ring and manage removals or expulsions. HOW TO USE IT Provide this sheet as a handout for participants to refer to between study visits. PATHWAYS TO HIGH ADHERENCE • AN ADHERENCE SUPPORT MANUAL FOR VAGINAL RING TRIALS PATHWAYS TO HIGH ADHERENCE • AN ADHERENCE SUPPORT MANUAL FOR VAGINAL RING TRIALS 158 APPENDIX F: SUPPLEMENTARY MATERIALS APPENDIX F: SUPPLEMENTARY MATERIALS 159 Vaginal Ring • Ring Use Instructions Vaginal ring should be worn all day and all night What to do if the ring comes out How to insert the ring If the ring comes out in a place If the ring comes out and that is NOT DIRTY, such as touches something that is Use your thumb and index the bed, or in your clothes, you DIRTY, such as the toilet or finger to press the sides of may wash it and put it back into the ground you should not put the ring together.