A Layered Approach to Automatic Construction of Large Scale Petri Nets Modelling Railway Systems
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-
Mt-2018-2-3.Pdf
2–3/2018 Kr 48,- TIDSAM 1098-02 NORWEGIAN DEFENCE And ECURITY ndUSTRIES ssOCIATION 9 770806 615906 02 S I A RETURUKEReturuke 39 v 12 STYRETS ÅRSBERETNING 2017 GiraffeFlexible protection for mobile forces1X Saab Technologies Norway AS saab.no CONTENTS CONTENTS: MINE CLEARANCE Editor-in-Chief: 2 The future is unmanned M.Sc. Bjørn Domaas Josefsen NSM 6 US Navy selects Naval Strike Missile NORDIC DEFENCE CO- OPERATION; NOT NECESSARILY DOOMED TO FAILURE NORDEFCO 8 NDIS (Nordic Defence Industry Seminar) 2018 Nordic collaboration within the defence sector has for many years been riddled with good intentions, but often with meagre results to show for all the efforts. FSi The Nordic countries are often regarded as a common unit, with 11 Norwegian Defence and Security almost similar languages (except Finland), a great deal of cultural Industries Association (FSi) similarity, and a long-standing tradition for co-operation on a number of different arenas. And yet, there are significant differences between the countries, not 17 ÅRSRAPPORT 2017 least from a security political and military point of view. Two of the Nordic countries are members of NATO, while two are BULLETIN BOARD FOR DEFENCE, alliance-free. Finland has an extended land border to Russia, while INDUSTRY AND TRADE Norway has a short land border as well as a long demarcation line at sea. Neither Sweden nor Denmark have land borders to Russia. 59 Gripen Plant in Brazil Sweden and Finland have huge forest regions, where Norway has 61 Command post shelters for Kongsberg fjords, mountains and deep valleys; Denmark mainly consists of a flat 63 Training Systems for the Swedish Army culture landscape spread across some mainland and a few large islands. -

Østensjø Bydelsdager 2021
Bydel Østensjø Østensjø bydelsdager 2021 torsdag 26. til søndag 29. august Forsidefoto: Marianne Lien Omang Velkommen Bydel Østensjø har fått en egen app for til Østensjø barn, ungdom og familier. bydelsdager! Endelig er vi forhåpentligvis tilbake til I appen "Ung i Østensjø" finner du normalen og kan møtes igjen. informasjon om aktivitetstilbudene Vi har lagt bak oss tøffe tider, men jammen er vi i bydelen: heldige som hører til i denne fine bydelen. Mange flere enn vanlig har brukt de fine grøntområdene vi har. Sommeraktiviteter for barn og unge Ung i Østensjøvannet, Østmarka, Nøklevann og Ulsrudvann for å nevne noe. Vi merker også at flere har benyttet seg av tilbudet om å Fritidsklubber Østensjø låne gratis sports- og friluftsutstyr på BUA Østensjø. Dette er en fin utvikling som vi Tilrettelagte fritidstilbud håper vil fortsette. Helsestasjon for ungdom I tillegg til vakker natur kan vi skryte av god kommunikasjon til byen og det er heller ikke langt til den andre siden av bydelen. Benytt Utekontakten muligheten nå under bydelsdagene til å bli kjent med andre steder. Arrangementene er åpne for alle uansett hvor i bydelen du bor. Idrett og andre fritidstilbud Tusen takk til frivillige organisasjoner, ulike tjenestesteder i bydelen og Frivilligsentraler engasjerte enkeltpersoner. Uten dere – ingen bydelsdager. Gaming Still opp, delta og benytt muligheten – nå som den endelig er her igjen! Vi er stolte av å presentere et variert og godt program. Vi håper du Arbeid for ungdom finner noe som fenger. Ulike tjenester for hjelp og støtte – og hva som ellers rører seg i bydelen. Hilsen Mariann Staxrud Utstumo Leder av Østensjø bydelsdager Skann QR-koden og last ned appen Ung i Østensjø fra App Store eller Google Play Torsdag 26. -

Sporveien Digitalisering & Innovasjon
SPORVEIEN DIGITALISERING & INNOVASJON TOGPRAT 26.09 INTRODUKSJON TIL SPORVEIEN OG DIGITALISERING OG INNOVASJON CASE EKSEMPLER TIPS & TRICKS / HVA HAR VI LÆRT? AGENDA SPORVEIEN AGENDA SPORVEIEN – NORGES STØRSTE LEVERANDØR AV KOLLEKTIVTRANSPORT UNIBUSS AS 1 Oms: 1.819 MNOK 2 Ans: 1915 3 Busser: 765 SPORVEIEN T-BANEN AS SPORVEIEN LEVERER TRIKK, T-BANE OG BUSS 1 Oms: 1.799 MNOK 2 Ans: 624 3 Tog: 115 SPORVEIEN TRIKKEN AS 3812 Ansatte NOK 4,952 MRD i omsetning 100% eid av Oslo Kommune 1 Oms: 937 MNOK 2 Ans: 387 3 Trikker: 72 PRODUKSJON 173 millioner enkeltreiser med trikk og t-bane i 2018 Verksted Trikk og t-bane, renhold bygg og vogner 2 Ans: 390 INFRASTRUKTUR 102 millioner enkeltreiser med Unibuss i 2018 Eier, forvalter, vedlikehold infrastruktur og utbygger Ca 100 investerings- 2 Ans: 320 3 Skinner: 240km prosjekter: 4,9 MRD ANTALL REISENDE MED T-BANEN ØKER 67% Økning i antall passasjerer med T-banens tjenester fra 2008 til 2018 2008 115.000 2018 122 000 000 Flere avganger på T-banen i 2017 2017 118 000 000 enn i 2008, en økning på 43% 2017 378' 2016 106 000 000 263' 2015 95 000 000 2014 88 000 000 363' 2013 85 000 000 2012 82 000 000 2011 81 000 000 288' 338' 2008 73 000 000 324' SPORVEIEN SATSER PÅ DIGITALISERING OG INNOVASJON – MEN HVA ER DET? DIGITALISERING … vil endre måten Sporveien jobber på … berører oss alle og krever at INNOVASJON alle drar i samme retning … er alt det kule. Men ikke noe som kommer av seg selv…! … er for å støtte individ, men også for helheten DIGITALISERING … har definisjoner i alle former, farger og språk "Digitalisering av lyd og bilde…" "Digitalisering er transformasjonen…" Sporveien – Digitalisering og innovasjon 6 CASE EKSEMPLER FRA SPORVEIENS PORTEFØLJE www.companyname.com © 2016 Jetfabrik Multipurpose Theme. -

25 Buss Rutetabell & Linjerutekart
25 buss rutetabell & linjekart 25 Furuset Vis I Nettsidemodus 25 buss Linjen Furuset har 4 ruter. For vanlige ukedager, er operasjonstidene deres 1 Furuset 00:08 - 23:53 2 Kjelsås Stasjon 14:06 - 17:21 3 Lørenskog Stasjon 05:06 - 23:08 4 Majorstuen 05:16 - 23:21 Bruk Moovitappen for å ƒnne nærmeste 25 buss stasjon i nærheten av deg og ƒnn ut når neste 25 buss ankommer. Retning: Furuset 25 buss Rutetabell 49 stopp Furuset Rutetidtabell VIS LINJERUTETABELL mandag 00:08 - 23:53 tirsdag 00:08 - 23:53 Majorstuen Valkyriegata 8, Oslo onsdag 00:08 - 23:53 Marienlyst torsdag 00:08 - 23:53 Kirkeveien 87, Oslo fredag 00:08 - 23:53 Vestre Aker Kirke lørdag 00:08 - 23:38 Ullevålsveien 113, Oslo søndag 00:08 - 23:38 Ullevål Sykehus 2, Oslo Ullevålsalléen 2, Oslo 25 buss Info Retning: Furuset John Colletts Plass Stopp: 49 2, Oslo Reisevarighet: 43 min Linjeoppsummering: Majorstuen, Marienlyst, Vestre Eventyrveien Aker Kirke, Ullevål Sykehus, Ullevålsalléen, John Sognsveien 50, Oslo Colletts Plass, Eventyrveien, Ullevål Stadion T, Ullevål Stadion, Blindern Vgs., Solvang, Nordbergveien, Ullevål Stadion T Kongleveien, Nordberghjemmet, Havnabakken, Sognsveien 65E, Oslo Korsvollbakken, Skibakken, Svensenga, Frysja, Stillatorvet, Kjelsås Stasjon, Kjelsåsalléen, Grefsen Ullevål Stadion Stadion, Lyngåsveien, Brannvaktveien, Grefsenlia, Sognsveien, Oslo Lofthus, Årrundveien, Årvoll Senter, Årvollveien, Stig, Tonsenhagen Torg, Tonsenhagen, Kolåsbakken, Blindern Vgs. Linderud Senter, Veitvet, Rødtvet T, Kalbakkstubben, Jon P. Erliens Vei 7, Oslo Bredtvet, Nedre -

Stortingsvalget 1965. Hefte II Oversikt
OGES OISIEE SAISIKK II 199 SOIGSAGE 6 EE II OESIK SOIG EECIOS 6 l II Gnrl Srv SAISISK SEAYÅ CEA UEAU O SAISICS O OWAY OSO 66 Tidligere utkommet. Statistik vedkommende Valgmandsvalgene og Stortingsvalgene 1815-1885: NOS III 219, 1888: Medd. fra det Statist. Centralbureau 7, 1889, suppl. 2, 1891: Medd. fra det Statist. Centralbureau 10, 1891, suppl. 2, 1894 III 245, 1897 III 306, 1900 IV 25, 1903 IV 109. Stortingsvalget 1906 NOS V 49, 1909 V 128, 1912 V 189, 1915 VI 65, 1918 VI 150, 1921 VII 66, 1924 VII 176, 1927 VIII 69, 1930 VIII 157, 1933 IX 26, 1936 IX 107, 1945 X 132, 1949 XI 13, 1953 XI 180, 1957 XI 299, 1961 XII 68, 1961 A 126. Stortingsvalget 1965 I NOS A 134. MARIENDALS BOKTRYKKERI A/S, GJØVIK Forord I denne publikasjonen er det foretatt en analyse av resultatene fra stortings- valget 1965. Opplegget til analysen er stort sett det samme som for stortings- valget 1961 og bygger på et samarbeid med Chr. Michelsens Institutt og Institutt for Samfunnsforskning. Som tillegg til oversikten er tatt inn de offisielle valglister ved stortingsvalget i 1965. Detaljerte talloppgaver fra stortingsvalget er offentliggjort i Stortingsvalget 1965, hefte I (NOS A 134). Statistisk Sentralbyrå, Oslo, 1. juni 1966. Petter Jakob Bjerve Gerd Skoe Lettenstrom Preface This publication contains a survey of the results of the Storting elections 1965. The survey appears in approximately the same form as the survey of the 1961 elections and has been prepared in co-operation with Chr. Michelsen's Institute and the Institute for Social Research. -
Vehicle Routing Problem Applied for Demand Controlled Waste Collection
Anett Cammermeyer Katrine Lunde Master Thesis - Vehicle routing problem applied for demand controlled waste collection - GRA 19003 Master of Science in Business and Economics: Logistics – Supply Chains and Networks Supervisor: Mehdi Sharifyazdi Date of Submission BI Norwegian Business School, Oslo Deadline 29.08.2014 01.09.2014 “This thesis is a part of the MSc Program at BI Norwegian Business School. The School takes no responsibility for the methods used, results found and conclusions drawn” GRA 19003 Master Thesis 01.09.2014 Acknowledgement This thesis is a submission to BI Norwegian Business School and completes our MSc degree in Logistics – Supply Chains and Networks, and thereby rounds out our five-year long education. The process of writing this thesis has been challenging, however interesting. We have learned a lot and know to this day that this is an experience we would not be without. We would like to thank Renovasjonsetaten and Sørum, which provided us with some necessary data needed for this thesis and giving us this opportunity. We would also like to give a special thanks to the chauffeur who let us participate on a route, and provided us with a lot of interesting information needed to understand the complexity of the work. The project has been very challenging and we would not have made it without the help of our supervisor Mehdi Sharifyazdi. His competence, guidance, time and insightful feedback have been a huge part of this thesis. At the end we will like to thank our partners and family for good support and positive enthusiasm during the work with this Master Thesis. -

69 Buss Rutetabell & Linjerutekart
69 buss rutetabell & linjekart 69 Haugerud Vis I Nettsidemodus 69 buss Linjen Haugerud har 3 ruter. For vanlige ukedager, er operasjonstidene deres 1 Haugerud 08:51 2 Lutvann 00:42 - 23:42 3 Tveita 00:06 - 23:06 Bruk Moovitappen for å ƒnne nærmeste 69 buss stasjon i nærheten av deg og ƒnn ut når neste 69 buss ankommer. Retning: Haugerud 69 buss Rutetabell 7 stopp Haugerud Rutetidtabell VIS LINJERUTETABELL mandag 08:51 tirsdag 08:51 Ole Messelts Vei Ole Messelts vei 3, Oslo onsdag 08:51 Lutvannsveien torsdag 08:51 Lutvannsveien, Oslo fredag 08:51 Lutvann Skole lørdag Opererer Ikke Lutvannsveien 17, Oslo søndag Opererer Ikke Fagerholt Johan Castbergs vei 68, Oslo Haukåsen Skole Dr. Dedichens Vei 39, Oslo 69 buss Info Retning: Haugerud Doktor Dedichens Vei Stopp: 7 Dr. Dedichens vei, Oslo Reisevarighet: 5 min Linjeoppsummering: Ole Messelts Vei, Haugerud T Lutvannsveien, Lutvann Skole, Fagerholt, Haukåsen Haugerudtunet, Oslo Skole, Doktor Dedichens Vei, Haugerud T Retning: Lutvann 69 buss Rutetabell 20 stopp Lutvann Rutetidtabell VIS LINJERUTETABELL mandag 00:42 - 23:42 tirsdag 00:42 - 23:42 Tveita T Tvetenveien 150, Oslo onsdag 00:42 - 23:42 Tveita torsdag 00:42 - 23:42 Tvetenveien, Oslo fredag 00:42 - 23:42 Stordamveien lørdag 00:42 - 23:42 Stordamveien 38B, Oslo søndag 00:42 - 23:42 Postkassene Hellerudveien 36, Oslo Rundtjernveien Hellerudveien, Oslo 69 buss Info Retning: Lutvann Hellerud Terrasse Stopp: 20 Hellerud terrasse 2, Oslo Reisevarighet: 13 min Linjeoppsummering: Tveita T, Tveita, Stordamveien, Hellerudgrenda Postkassene, Rundtjernveien, Hellerud Terrasse, Rundtjernveien 51, Oslo Hellerudgrenda, Krokstien, Grankollveien, Hellerudgrenda, Landeroveien, Haugerudveien, Krokstien Haugerudveien, Haugerud T, Doktor Dedichens Vei, Hellerudgrenda 52, Oslo Haukåsen Skole, Fagerholt, Lutvann Skole, Lutvannsveien, Ole Messelts Vei Grankollveien Grankollveien, Oslo Hellerudgrenda Rundtjernveien 51, Oslo Landeroveien Venåsvegen, Oslo Haugerudveien Hellerudveien 1A, Oslo Haugerudveien Haugerudveien, Oslo Haugerud T Haugerudtunet, Oslo Doktor Dedichens Vei Dr. -

Naboposten Nr
NABOposten Nr. 1 - vinter 2018 - 64. årgang Oppsal Menighetsblad Østensjø skole 100 år i mars 2018 1 Kontaktinformasjon www.oppsalmenighet.no Oppsal kirke Søndre Skøyen kapell Solbergliveien 85, 0683 Oslo Dalbakkveien 39, 0682 Oslo Bankkonto: 7877.06.73983 Henvendelser rettes til Menighetskontoret menighetskontoret Oppsal. Utleie av Oppsal kirke Telefon: 23 62 99 60 Bankkonto: 1609.12.68071 Kontakt menighetskontoret E-post: Utleie av Søndre [email protected] Skøyen kapell Åpent: mandag til fredag Forretningsfører: kl. 10:00 - 14:00 Sigurd Edv. Gullerud Oppsal menighetsråd Telefon: 22 27 43 02 Leder: Marianne Næss Selle E-post: sedv.gullerud@ Telefon: 907 25 426 vikenfiber.no E-post: [email protected] Ansatte i Oppsal menighet Daglig leder: Jan Bye Kantor: Sølvi Ådna Holmstrøm T: 23 62 99 62 / M: 452 65 914 T: 23 62 99 69 / M: 924 36 770 E-post: [email protected] E-post: [email protected] Sokneprest: Kåre Skråmestø Organist i Søndre Skøyen kapell: T: 23 62 99 63 / M: 924 26 917 Lars Fredrik Nystad / M: 958 57 019 E-post: [email protected] E-post: [email protected] Trosopplæringsmedarbeider: Prostiprest: Hans Jacob Finstad Daniel Waka M: 452 40 091 T: 23 62 99 67/ M: 947 82 015 E-post: [email protected] E-post: [email protected] Kapellan: Endre Olav Osnes Kateketvikar: Ingvild Amalie Stavran T: 23 62 99 65 / M: 452 41 346 T: 23 62 99 70 / M: 988 73 381 E-post: [email protected] E-post: [email protected] Kapellan: Nina Kristine Niestroj Kateketvikar: Simeon Ottesen I permisjon T: 23 62 99 70 / M: 917 57 746 Epost: [email protected] Diakon: Edel Lilleeng Solberg T: 23 62 99 72 / M: 917 08 146 Kateket: Monika Skaalerud E-post: [email protected] I permisjon Kirketjener: Johnny Hagen T: 23 62 99 60 / M: 938 04 007 E-post: [email protected] og leveres ut til Fast avtale: Forsidebilde: menighetens 10 % rabatt Østensjø skole før husstander. -

Årsrevy Nyhetsdryss Dialogos 2018
ÅRSREVY NYHETSDRYSS DIALOGOS 2018 I 2018 ble det sendt ut 38 NYHETSDRYSS fra Dialogos til ca 455 mottakere, samt 10 utgaver av AntroPost til cirka 3300 e-postmottakere. Se AntroPost for 2018 her: https://www.dialogos.no/wp-content/uploads/AntroPost-1-2018.pdf Det betyr at det ble sendt ut nyheter og informasjon i 48 av årets uker. Ansvarlig for utsendelsene er Sissel Jenseth, Dialogos, m 975 63 875, [email protected] I Nyhetsdryssene var det til sammen 18 Minisnutter av Phillip Nortvedt, se https://www.dialogos.no/wp-content/uploads/Phillips-minisnutt-2018.pdf INNHOLD: STEINERBARNEHAGER – OG SEKSÅRINGENE I SKOLEN 2 • 6-årsreformen – barnehage eller skole – lek eller lekser 3 • UtdAnning – DatA i barnehagen 8 STEINERSKOLER 10 • Oslo – Bærum – Asker – Nesodden – Hurum – Ås – Askim – 10 Moss – FredrikstAd – Vestfold – Ringerike – Eidsvoll – Gjøvik- Toten – Hedemarken – LillehAmmer – ArendAl – KristiAnsAnd – StAvAnger – Bergen – Ålesund – Trondheim – Tromsø • Skoler under etAblering – Folkehøyskole 19 • Steinerskolen 100 år 2019 – Steinerskoler i utlAndet 21 • Høyskole og universitet 26 • Steinerskoleelever – Tidligere elever – Lærere – Foreldre 26 STEINERPEDAGOGIKK 36 • Opplevelser med steinerpedAgogikken 37 • PisA og nAsjonAle prøver 39 • IKT i skolen 40 EURYTMI 42 HELSEPEDAGOGIKK OG SOSIALPTERAPI 43 • Camphill og sosialterapeutiske steder 43 • Arbeid til Alle 46 • Downs og Abortspørsmålet 47 MEDISIN 47 • Komplementær og AlternAtiv behAndling 47 • VidArkliniken, Sverige 48 • WeledA, kreft, misteltein – Medisin for dyr 49 • BarnvAccin och -
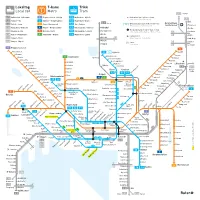
Lokaltog Local Rail Trikk Tram T-Bane Metro
Lokaltog T-bane Trikk Local rail Metro Tram L12 Eidsvoll L 1 Spikkestad – Lillestrøm 1 Frognerseteren – Helsfyr 11 Majorstuen – Kjelsås Holdeplass bare i pilens retning Stop in direction of arrow only L13 L 2 Skøyen – Ski 2 Gjønnes – Ellingsrudåsen 12 Majorstuen – Disen Dal L 3 Jaren Oslo lufthavn L 3 Oslo S – Jaren 3 Storo – Mortensrud 13 Jar – Grefsen 12 Endeholdeplass bare til bestemte tider Final stop at certain times only Gardermoen Hauerseter L12 Kongsberg – Eidsvoll 4 Ringen – Bergkrystallen 17 Rikshospitalet – Grefsen Hakadal Nordby Overgangsmuliget Tog / T-bane / Trikk Varingskollen L13 Drammen – Dal 5 Østerås – Vestli 18 Rikshospitalet – Holtet Interchange option Railway / Metro / Tram 4N Jessheim Åneby L14 Asker – Kongsvinger 6 Sognsvann – Ringen 19 Majorstuen – Ljabru Kløfta Flytogstasjon 3Ø Nittedal L21 Skøyen – Moss 2Ø Airport Express Train station Lindeberg Movatn 1 L22 Skøyen – Mysen Soner 3Ø Frogner Snippen 2V Fare zones 2Ø Leirsund 1 Frognerseteren 5 Voksenkollen 11 12 Kjelsås Vestli Lillevann Kjelsåsalleen Stovner Skogen 6 Sognsvann Kjelsås Grefsen stadion Rommen Voksenlia Grefsenplatået Romsås Kringsjå Holmenkollen Glads vei Grorud Lillestrøm Besserud Holstein Nydalen Sanatoriet Ammerud L 1 L14 Midtstuen Østhorn Disen Grefsen Kalbakken Sagdalen Kongs- Skådalen Tåsen Rødtvet vinger 12 13 17 Sinsenkrysset Strømmen Vettakollen Ringen Berg Veitvet Fjellhamar Gulleråsen Rikshospitalet Linderud 3 4 4 6 Hanaborg Gråkammen 17 18 Vollebekk Lørenskog Storo Sinsen Slemdal Nydalen 3 Risløkka Høybråten 2Ø Gaustad- Ullevål stadion -

Upgrade of Østensjø Line
Project name: Upgrade of Østensjø Line Project period: 2014-2017 Owner: Sporveien Oslo AS Client: Sporveien Oslo AS In brief: Engineering design of upgrade of around 8 kilometres. Metro line corridor between Hellerud and Mortensrud Project size: Facelift for metro line from Hellerud to 909 MNOK ex. VAT Mortensrud The Østensjø Line is the metro line between Hellerud and Mortensrud. The Østensjø Line was opened as a tram line from Vålerenga to Oppsal in 1926, and in 1958 the tram line was extended to Bøler. In 1967, the Østensjø Line was upgraded to metro standard, and the line was extended to Skullerud. In 1998, the metro line was extended all the way out to Mortensrud. The construction of the Løren Line, which was due to open in 2016, would free up capacity through the city centre tunnel for one train every 15 minutes in both directions. The newly-available capacity in the city centre tunnel would be used to increase the train frequency on the Østensjø Line from a 15 minute service to a 7.5 minute service. At that time, the Østensjø Line was in such poor condition that an extensive upgrade of the line was needed before the train frequency could be increased. In May 2014, Aas-Jakobsen was hired by Sporveien Oslo AS to design the upgrade of the Østensjø Line. Our sub-consultants on the project were Vianova, Geovita, ElectroNova, ECT, NGI, Grindaker, Brekke & Strand Akustikk, Safetec, Ingenia and Sweco. The engineering design work started in May 2014, and by early 2015 the inquiry for competitive tender had been sent out for five different contracts covering the bulk of the work. -
Policies for Sustainable Commuting
TØI report 1527/2016 Farideh Ramjerdi Kåre H Skollerud Jørgen Aarhaug Policies for sustainable commuting TØI-rapport 1527/2016 Policies for sustainable commuting Farideh Ramjerdi, Kåre H. Skollerud, Jørgen Aarhaug Picture front page: Tidsskriftet Samferdsels temaarkiv This report is covered by the terms and conditions specified by the Norwegian Copyright Act. Contents of the report may be used for referencing or as a source of information. Quotations or references must be attributed to the Institute of Transport Economics (TØI) as the source with specific mention made to the author and report number. For other use, advance permission must be provided by TØI. ISSN 0808-1190 ISBN 978-82-480-1774-5 Electronic version Oslo, March 2017 Tittel Tiltak for bærekraftige arbeidsreiser Title Policies for sustainable commuting Forfatter(e): Farideh Ramjerdi, Kåre H. Author(s) Farideh Ramjerdi, Kåre H. Skollerud Jørgen Aarhaug Skollerud Jørgen Aarhaug Dato: 12.2016 Date: 12.2016 TØI-rapport 1527/2016 TØI Report: 1527/2016 Sider: 63 Pages: 63 ISBN elektronisk: 978-82-480-1774-5 ISBN Electronic: 978-82-480-1774-5 ISSN: 0808-1190 ISSN: 0808-1190 Finansieringskilde(r): Regionalt forskingsfond Financed by: The Regional Research Council hovedstaden, Akershus for Oslo and Akershus, Akershus fylkeskommune, Ruter AS, County, Ruter AS, The Jernbaneverket, Oslo kommune, Norwegian Railway Prosjekt: 3993 – Reisevaneendring i Oslo Project: 3993 – travel behavio ur change og Akershus – en analyse av in Oslo and Akershus – a study seks trafikk knutepunkt of six key