Tests of the Amtrak Sdp-40F Train Consist Conducted on Chess Ie System Track
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

My,M~Lflijltl~Ffdu \'------
A Review of Rail Behavior u.s. Department Under Wheel/flail Impact Of Transportation Federal Railroad Administration Load ing ,/mY,M~lflijltl~ffDU \'------------- Office of Research and Development Washington DC 20590 D. R. Ahlbeck Batelle Columbus. Laboratories 505 King Avenue Columbus. Ohio 43201-2693 DOT -FRA-ORO-86-01 April 1986 This document IS avaliableto the DOT -TSC-FRA-85-5 Final Report Public through the National Technical Information Service, Springfield, Virginia 22161. RfPROOUCED BY NA Tl.ONAL TECHNICAL INFORMATION SERVICE u.s. DEPARTMENT OF COMMERCE SPRINGFiElD, VA. 22161 NOTICE This document is disseminated under the sponsorship of the Department of Transportation in the interest of information exchange. The United States Government assumes no liability for its contents or use thereof. NOTICE The United States Government does not endorse products of manufacturers. Trade of manufacturers'names appear herein solely because they are con sidered essential to the object of this report. a... - Technical Report Documentation Page I. Repo"No~---------------------r~2~.~G~0-v-.-r"-m-e-n-t~A-c-c-e'-I~io-n~N-o.~---------r~3-.~R~e-c~iP-i-en-t~·'~C-ot-o~lo-g-N--0.---------------, DOT-FRA-ORO-86-0l 4. Till. and Subtitle s. Reporr Dale April 1986 A REVIEW OF RAIL BEHAVIOR UNDER WHEEL/RAIL 6. Perform,ng Orgoni zalian Caoe IMPACT LOADING TSC/DTS-73 r-:;--:-7""~:----------------------------------------------------~ 8. P .rformi ng Orgoni zation Repo,' No. 7. Author'.) / D.R. Ahlbeck _pOT-~SC-FRA-85-5 9. P .,forming_ O,gani &a'ion Nom. and Addr.ss 10. Worlo Unit No, (TRAIS) Batelle Columbus Laboratories RR6l9/R6654 505 King Avenue 11. -

The Evolution of the Steam Locomotive, 1803 to 1898 (1899)
> g s J> ° "^ Q as : F7 lA-dh-**^) THE EVOLUTION OF THE STEAM LOCOMOTIVE (1803 to 1898.) BY Q. A. SEKON, Editor of the "Railway Magazine" and "Hallway Year Book, Author of "A History of the Great Western Railway," *•., 4*. SECOND EDITION (Enlarged). £on&on THE RAILWAY PUBLISHING CO., Ltd., 79 and 80, Temple Chambers, Temple Avenue, E.C. 1899. T3 in PKEFACE TO SECOND EDITION. When, ten days ago, the first copy of the " Evolution of the Steam Locomotive" was ready for sale, I did not expect to be called upon to write a preface for a new edition before 240 hours had expired. The author cannot but be gratified to know that the whole of the extremely large first edition was exhausted practically upon publication, and since many would-be readers are still unsupplied, the demand for another edition is pressing. Under these circumstances but slight modifications have been made in the original text, although additional particulars and illustrations have been inserted in the new edition. The new matter relates to the locomotives of the North Staffordshire, London., Tilbury, and Southend, Great Western, and London and North Western Railways. I sincerely thank the many correspondents who, in the few days that have elapsed since the publication: of the "Evolution of the , Steam Locomotive," have so readily assured me of - their hearty appreciation of the book. rj .;! G. A. SEKON. -! January, 1899. PREFACE TO FIRST EDITION. In connection with the marvellous growth of our railway system there is nothing of so paramount importance and interest as the evolution of the locomotive steam engine. -

Modeling China's — and Now Iowa's — Mighty QJ 2-10-2'S
February 2007, Volume 75, Number 9 Modeling China’s — and now Iowa’s — mighty QJ 2-10-2’s After being replaced by diesels in their home country of China, a few of these modern, heavy-duty steamers have found their way to the American Heartland / Robert D. Turner ntil the end of 2005 one last place remained on Earth where big steam locomotives in substantial numbers were running in regular freight and passenger service on a year- round basis. That place was northern China, and in particular the autonomous region U of Inner Mongolia, to the northwest of Beijing. There, on the JiTong Railway, (often written Ji-tong) a stable of rugged 2-10-2’s—coal-fired and fire breathing—were still racking up ton- miles every day in an uncompromising display of first-class railroading. These impressive machines were China’s QJ class locomotives. QJ is short for Qian Jin, or “Advancing.” It comes from the Chinese revolutionary slogan, “revolution is the locomotive pushing human history forward.” Revolutionary rhetoric aside, which I am sure loses something in the translation, it is fair to say that in years to come the QJ will be remembered as one of the most interesting and important types of steam locomotives developed in the 20th century. In fact, two now reside in North America, having been imported by Railroad Development Corporation in June of 2006. They were moved to the Iowa Interstate Railroad soon after their arrival and were operated on its rails over the weekend of September 14-17, 2006. I met my first QJ early in 2001 on China Rail just before they were retired, and then began to explore the JiTong Railway, where QJ’s were in abundance. -

15Th May 2017
£1.00 15th May 2017 Station Studio, 6 Summerleys Road, Princes Risborough, Bucks, HP27 9DT Tel: 01844 345158 Fax: 01844 274352 Email: [email protected] Web: www.grsuk.com Narrow Gauge Electric Locomotive Kits Prototype Locomotive kits Manufactured by GRS for both 45mm and 32mm gauges Tasmanian K class Beyer-Garratt 0-4-0+0-4-0 The first two Beyer-Garratt’s to be designed and built in Manchester in 1909 for the North -East Dundas Tramway line in Tasmania. They were unique amongst Garratts in being of the Compound type, a system not recommended by their designer, and having cylinders mounted at the inboard end of the power bogies. At the end of it’s service life, in 1947, K1 was repatriated to Gorton works where it was preserved until Beyer-Peacock closed the works in 1965. Now owned by the Ffestiniog railway and returned to service after an extensive restoration in 2004, K1 can now be seen at work on the Welsh Highland line. The kit is designed to be easy to build and comprises largely of a cast resin superstructure complemented by brass etches, sitting on top of two powered chassis of steel frames and brass stretchers which screw together with the addition of steel and Nickel-Silver valve gear. Length 512mm, Width 110mm, Height 175mm CMR250 K1 Beyer-Garratt loco kit 45mm Gauge CMR251 K1 Beyer-Garratt loco kit 32mm Gauge Campbeltown & Machrianish 0-6-2T Locomotive Andrew Barclay produced two of these locos in 1906/07 for the tourist passenger traffic on the remote Kintyre Peninsula railway. -

Locomotive Engine Driving
.UMWr '• .;.'.«.• .•.^•>.riiMfe|il^^^SHfr^ Pi 1 •iri^ p Eli I ^' . •-'• -*L - ,'5't.-- > / A* ,' Ss.^> ' rX t.*V **: '-^- ', i.4:. 4. •* 'j.jsefe' A v\ (aj o X \\ ."'eS' ^. ^>; .-'--^^ Loiid0n:Crost7-Iidfekwoo<i&C? ZSratioDers HaHCoiirt. LOCOMOTIVE ENGINE DRIVING A PRACTICAL MANUAL FOR ENGINEERS IN CHARGE OF LOCOMOTIVE ENGINES By MICHAEL EEYKOLDS MEMBER OF THE SOCIETY OF EXOIXEERS, FOUMERLY LOCOMOTIVE INSPECTOR LONDON, BRIGHTON, AND SODTH COAST RAILWAY EIGHTH EDITION COMPRISING, BESIDES OTHER ADDITIONAL MATTER A KEY TO THE LOCOMOTIVE ENGINE SSEith nttmcrotts lUustratimts gpiol];u. LONDON CROSBY LOCKWOOD AND SON 7, STATIONERS' HALL COURT, LTJDGATE HILL 1888 \_All rights reserved'] 1 J :i TO THE ENGINEMEN AND FIREMEN OF LOCOMOTIVE ENGINES THEOUGHOUT THE UNITED KINGDOM THIS WOEK IS AS A TRIBUTE OF EEGARD AND RESPECT BY THEIR SERVANT THE AUTHOB rrxv^^ PEEFACE. I AM ambitious to extend and improve the social condition of locomotive drivers by placing within their reach a standard test of capacity that will be unaffected by local or temporary prejudices, fancies, fashions, or accidental connections. It appears to me that our enginemen of to-day will be to those of the next century what " Puffing Billy " in 1825 is to the " Monarch of Speed " in 1877. I hold a very strong opinion that our enginemen may be stripped of old habits and customs by self-help and self-reliance, and developed into a high state of efficiency. In carrying out such a measure of progress, difficulties, no doubt, which usually attend the work of reformation, will crop up ; and many disappointments await the pioneer. The engine is ahead of the engineman—all the hard scheming, comparatively speaking, is done ; but the engineman remains where he was in George Stephenson's time, and his stationary condi- tion jars with his surroundings. -
Practical Scale Catalogue
Email: [email protected] Manufacturers and suppliers to the model engineering hobby www.pollymodelengineering.co.uk Polly Model Engineering Limited Tel: +44 115 9736700 Atlas Mills, Birchwood Avenue Fax: +44 115 9727251 Long Eaton NOTTINGHAM ENGLAND NG10 3ND Incorporating BRUCE ENGINEERING PRACTICAL SCALE CATALOGUE October 2012 Tel: 0115 9736700 Fax: 0115 9727251 Polly Model Engineering - Practical Scale – October 2012 1 Introduction: Practical Scale is the fine scale range of locomotive designs offered by Polly Model Engineering. These designs should not be confused with the well known locomotive kits. Designs are exclusive to Polly and include models in the popular scales of 3 ½”, 5” and 7 ¼” gauge. The general aim of Practical Scale has been to provide designs suitable for the 21 st Century where aspirations for fine scale models are very high, but experience, skill and facilities are not always available. Designs are produced by reputable designers with the majority being published in the model engineering press. We specialise in GWR designs, but the range includes locos from other railways, including SR, HR and MR. We offer a number of GWR standard parts also suitable for designs other than those listed. Wheel castings etc for other designs are also available, please enquire. The most well known of our designs is Penrhos Grange in 5” gauge, designed by Neville Evans and although an impressive GWR 4-6-0, this loco is relatively simple to build. In addition to the drawings and castings which might normally be supplied, there are a wide range of lost wax castings, laser cut parts and some machined parts available. -

Southern Railway Locomotive Drawings and Microfilm Lists.Xlsx
Southern Railway Microfilm Lists Description: These are a selection from the Southern Railway Works drawings collection deemed to be of particular interest to researchers and preserved railways. The cards are listed in two tables – a main list of drawings from each of the main works and a smaller list of sketches. There are 943 drawings in total. The main table of drawings has been sub-divided into the three constituent works of the former Southern Railway and British Rail (Southern Region). These were Ashford (formerly the South Eastern & Chatham Railway), Brighton (formerly the London, Brighton & South Coast Railway, both B and W series) and Eastleigh (formerly the London & South Western Railway and including the predecessor works at Nine Elms). There are 826 drawings in this series. Details in the tables are drawn directly from the originals. Further information may be obtained by cross-reference with the full list of surviving original drawings (locomotives only) or works registers. A small number of drawings are of poor quality and will not print out in fine detail. This has usually been indicated. Users of these aperture cards are advised that they should view the aperture cards before purchasing printed copies as there can be no guarantee that all details will be clearly visible. The tables as set out include all drawings copied up to the present. The majority are from locomotives, but there are some from carriage and wagons. At all the works these were drawn in the same numerical series. The listing of the original carriage and wagon drawings from the former Southern works is still at an early stage and there may therefore be additions to the available aperture cards in due course. -
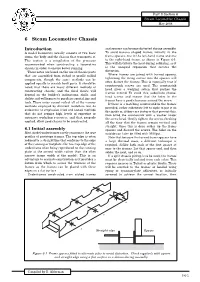
GOG Manual S6 Steam Locos
Part 3 Section 6 Steam Locomotive Chassis May 2008 6 Steam Locomotive Chassis Introduction and spacers can become distorted during assembly. A model locomotive usually consists of two basic To avoid banana shaped frames, initially fit the items, the body and the chassis that transports it. frame spacers, one to the left-hand frame and one This section is a compilation of the processes to the right-hand frame, as shown in Figure 6-1. recommended when constructing a locomotive This will distribute the heat during soldering, as it chassis in order to ensure better running. is the unequal expansion that creates the These notes are based on the use of chassis parts distortion. that are assembled from etched or profile milled Where frames are joined with turned spacers, components, though the same methods can be tightening the fixing screws into the spacers will often distort the frames. This is especially true if applied equally to scratch built parts. It should be countersunk screws are used. The countersink noted that there are many different methods of head gives a wedging action that pushes the constructing chassis, and the final choice will frames around. To avoid this, substitute cheese- depend on the builder's inclinations, skills, and head screws and ensure that the holes in the ability and willingness to purchase special jigs and frames have a good clearance around the screw. tools. These notes cannot reflect all of the various If there is a matching countersink in the frames methods employed by different modellers, but do provided, either substitute left to right to put it on endeavour to emphasise tried and tested methods the inside or, if there are features that prevent this, that do not require high levels of expertise or then blind the countersink with a washer under extensive workshop resources, and that, properly the screw head. -

Rail Reports
RAILWAY INVESTIGATION REPORT R10T0213 MAIN TRACK DERAILMENT CANADIAN NATIONAL TRAIN M31451-28 MILE 144.19 BALA SUBDIVISION FALDING, ONTARIO 01 OCTOBER 2010 The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. - Railway Investigation Report Main-Track Derailment Canadian National Train M31451-28 Mile 144.19 Bala Subdivision Falding, Ontario 01 October 2010 Report Number R10T0213 Summary At approximately 1050, Eastern Daylight Time, on 01 October 2010, Canadian National freight train M31451-28, proceeding southward from Capreol, Ontario, to Toronto, Ontario, derailed 21 cars just south of the James Bay Junction Road crossing at Mile 144.19 of the Bala Subdivision near Falding, Ontario. The derailed cars included 8 loaded tank cars containing non-odorized LPG (Special Dangerous, UN 1075) and 7 loaded tank cars containing fuel oil. A number of homes in the vicinity of the derailment were evacuated. There were no injuries and no product was released. Ce rapport est également disponible en français. - 3 - Other Factual Information Canadian National (CN) train service design plans specify a horsepower to tonnage ratio (HPT) and identify scheduled lifts, set-outs and inspection points en route for a given train. CN train journals are checked against the designed HPT requirements to ensure that the train has adequate power to adhere to a predetermined schedule. CN freight train M31451-28 (the train) was a mixed conventional train (equipped with head-end power) which originated in Edmonton, Alberta and was destined for Toronto, Ontario. -

Derailment of Bogie on Freight Train 4PM6
InsertDerailment document of bogie titleon freight train 4PM6 LocationPort Augusta, | Date South Australia | 6 May 2011 ATSB Transport Safety Report Investigation [InsertRail Occurrence Mode] Occurrence Investigation Investigation XX-YYYY-####RO -2011- 0 08 Final ATSB TRANSPORT SAFETY REPORT Rail Investigation RO-2011-008 Final Derailment of a bogie on freight train 4PM6 at Port Augusta, South Australia on 6 May 2011 Released in accordance with section 25 of the Transport Safety Investigation Act 2003 - i - Published by: Australian Transport Safety Bureau Postal address: PO Box 967, Civic Square ACT 2608 Office: 62 Northbourne Avenue Canberra, Australian Capital Territory 2601 Telephone: 1800 020 616, from overseas +61 2 6257 4150 Accident and incident notification: 1800 011 034 (24 hours) Facsimile: 02 6247 3117, from overseas +61 2 6247 3117 Email: [email protected] Internet: www.atsb.gov.au © Commonwealth of Australia 2013 In the interests of enhancing the value of the information contained in this publication you may download, print, reproduce and distribute this material acknowledging the Australian Transport Safety Bureau as the source. However, copyright in the material obtained from other agencies, private individuals or organisations, belongs to those agencies, individuals or organisations. Where you want to use their material you will need to contact them directly. ISBN and formal report title: see ‘Document retrieval information’ on page v. - ii - SAFETY SUMMARY What happened On 6 May 2011, the trailing bogie on the 47th wagon of freight train 4PM6 derailed after traversing the Carlton Parade level crossing at Port Augusta, South Australia. The wagon travelled over a second level crossing and re-railed itself when it entered a third level crossing about 1,300 m later. -

Auction Database 0206 IN
Toy Train Auction Lot Descriptions STOUT AUCTIONS January 19, 2013 801 Prewar Lionel O gauge 2613 Pullman missing a hand rail, 2614 observation, and 2615 baggage, passenger cars, C6. 802 Postwar HAG Switzerland electric locomotive with two passenger cars, C6. 803 Prewar Lionel O gauge 253 electric boxcab loco with 613 Pullman coach, 614 observation, and 615 baggage, trains look nicer C6 area. 804 Postwar JEP O gauge RO E.501 electric locomotive with two SBB CFF passenger cars, one baggage/combine and one 2nd and 3rd class passenger coach. Trains look nicer C6-7. Loco has nice castings, repainted pantographs or red primer showing through chips. 805 Prewar Lionel O gauge 812 gondolas with mixed trim, coupler, and shades of green, variations. One missing brake wheel and one missing coupler latch box. Trains otherwise look C6 area. 806 Prewar Lionel O gauge 248 boxcab electric locos, one is in orange with casting fatigued wheels and missing diecast headlight. Green loco has good original wheels but missing a coupler. Green looks C5-6, orange looks C6. 807 Postwar Paya freight/goods gondola car, P.H. 1354 / 20000K. Two cars, both have workers dog house, both tarp/cover support bars (one broken but included), one has tarp marked Juguetes P.N. 1101. Trains have some very light casting fatigue to some wheels, some distortion to diecast end pieces, one end piece has a very small chip to corner. 808 Prewar Lionel O gauge 511 flatcars in tougher to find aluminum with latch couplers variation, C6. Cars have left brake wheels on one and right brake wheels on other. -
Soo Line Locomotive 2719 Eau Claire WI Property Name County State N/A Multiple Name
NFS Form 10-900-a OMB Approval No. 1024-0018 (8-86) United States Department of the Interior National Park Service National Register of Historic Places Continuation Sheet Section number Page SUPPLEMENTARY LISTING RECORD NRIS Reference Number: 93001453 Date Listed: 1/10/94 Soo Line Locomotive 2719 Eau Claire WI Property Name County State N/A Multiple Name This property is listed in the National Register of Historic Places in accordance with the attached nomination documentation subject to the following exceptions, exclusions, or amendments, notwithstanding the National Park Service certification included in the nomination documentation. Signature of Date of Action Amended Items in Nomination: Boundary Description: The second sentence of the Verbal Boundary Description is revised to read: Boundaries of the nominated property are determined by the chain-link fence that surrounds the resource, enclosing an area approximately 120' x 40' centered on the locomotive. This information was confirmed with James Draeger of the WI SHPO. DISTRIBUTION: National Register property file Nominating Authority (without nomination attachment) PS Form 10-900 klrtl . - ^ (Rev. 8/86) NOV 2 0 1993 Wisconsin Word Processor Format (1331D) Approved 3/87 NAT!OhMt United States Department of the Interior National Park Service NATIONAL REGISTER OF HISTORIC PLACES REGISTRATION FORM This form is for use in nominating or requesting determinations of eligibility for individual properties or districts. See instructions in Guidelines for Completing National Register Forms (National Register Bulletin 16). Complete each item by marking "x" in the appropriate box or by entering the requested information. If an item does not apply to the property being documented, enter "N/A" for "not applicable." For functions, styles, materials, and areas of significance, enter only the categories and subcategories listed in the instructions.