Mars Surface Missions Require Light, Efficient and Robust Passive Bulk Insulation to Survive the Harsh and Dynamic Thermal Environment
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Imagining Outer Space Also by Alexander C
Imagining Outer Space Also by Alexander C. T. Geppert FLEETING CITIES Imperial Expositions in Fin-de-Siècle Europe Co-Edited EUROPEAN EGO-HISTORIES Historiography and the Self, 1970–2000 ORTE DES OKKULTEN ESPOSIZIONI IN EUROPA TRA OTTO E NOVECENTO Spazi, organizzazione, rappresentazioni ORTSGESPRÄCHE Raum und Kommunikation im 19. und 20. Jahrhundert NEW DANGEROUS LIAISONS Discourses on Europe and Love in the Twentieth Century WUNDER Poetik und Politik des Staunens im 20. Jahrhundert Imagining Outer Space European Astroculture in the Twentieth Century Edited by Alexander C. T. Geppert Emmy Noether Research Group Director Freie Universität Berlin Editorial matter, selection and introduction © Alexander C. T. Geppert 2012 Chapter 6 (by Michael J. Neufeld) © the Smithsonian Institution 2012 All remaining chapters © their respective authors 2012 All rights reserved. No reproduction, copy or transmission of this publication may be made without written permission. No portion of this publication may be reproduced, copied or transmitted save with written permission or in accordance with the provisions of the Copyright, Designs and Patents Act 1988, or under the terms of any licence permitting limited copying issued by the Copyright Licensing Agency, Saffron House, 6–10 Kirby Street, London EC1N 8TS. Any person who does any unauthorized act in relation to this publication may be liable to criminal prosecution and civil claims for damages. The authors have asserted their rights to be identified as the authors of this work in accordance with the Copyright, Designs and Patents Act 1988. First published 2012 by PALGRAVE MACMILLAN Palgrave Macmillan in the UK is an imprint of Macmillan Publishers Limited, registered in England, company number 785998, of Houndmills, Basingstoke, Hampshire RG21 6XS. -
AMNH Digital Library
^^<e?& THERE ARE THOSE WHO DO. AND THOSE WHO WOULDACOULDASHOULDA. Which one are you? If you're the kind of person who's willing to put it all on the line to pursue your goal, there's AIG. The organization with more ways to manage risk and more financial solutions than anyone else. Everything from business insurance for growing companies to travel-accident coverage to retirement savings plans. All to help you act boldly in business and in life. So the next time you're facing an uphill challenge, contact AIG. THE GREATEST RISK IS NOT TAKING ONE: AIG INSURANCE, FINANCIAL SERVICES AND THE FREEDOM TO DARE. Insurance and services provided by members of American International Group, Inc.. 70 Pine Street, Dept. A, New York, NY 10270. vww.aig.com TODAY TOMORROW TOYOTA Each year Toyota builds more than one million vehicles in North America. This means that we use a lot of resources — steel, aluminum, and plastics, for instance. But at Toyota, large scale manufacturing doesn't mean large scale waste. In 1992 we introduced our Global Earth Charter to promote environmental responsibility throughout our operations. And in North America it is already reaping significant benefits. We recycle 376 million pounds of steel annually, and aggressive recycling programs keep 18 million pounds of other scrap materials from landfills. Of course, no one ever said that looking after the Earth's resources is easy. But as we continue to strive for greener ways to do business, there's one thing we're definitely not wasting. And that's time. www.toyota.com/tomorrow ©2001 JUNE 2002 VOLUME 111 NUMBER 5 FEATURES AVIAN QUICK-CHANGE ARTISTS How do house finches thrive in so many environments? By reshaping themselves. -
Anza-Borrego Desert State Park Bibliography Compiled and Edited by Jim Dice
Steele/Burnand Anza-Borrego Desert Research Center University of California, Irvine UCI – NATURE and UC Natural Reserve System California State Parks – Colorado Desert District Anza-Borrego Desert State Park & Anza-Borrego Foundation Anza-Borrego Desert State Park Bibliography Compiled and Edited by Jim Dice (revised 1/31/2019) A gaggle of geneticists in Borrego Palm Canyon – 1975. (L-R, Dr. Theodosius Dobzhansky, Dr. Steve Bryant, Dr. Richard Lewontin, Dr. Steve Jones, Dr. TimEDITOR’S Prout. Photo NOTE by Dr. John Moore, courtesy of Steve Jones) Editor’s Note The publications cited in this volume specifically mention and/or discuss Anza-Borrego Desert State Park, locations and/or features known to occur within the present-day boundaries of Anza-Borrego Desert State Park, biological, geological, paleontological or anthropological specimens collected from localities within the present-day boundaries of Anza-Borrego Desert State Park, or events that have occurred within those same boundaries. This compendium is not now, nor will it ever be complete (barring, of course, the end of the Earth or the Park). Many, many people have helped to corral the references contained herein (see below). Any errors of omission and comission are the fault of the editor – who would be grateful to have such errors and omissions pointed out! [[email protected]] ACKNOWLEDGEMENTS As mentioned above, many many people have contributed to building this database of knowledge about Anza-Borrego Desert State Park. A quantum leap was taken somewhere in 2016-17 when Kevin Browne introduced me to Google Scholar – and we were off to the races. Elaine Tulving deserves a special mention for her assistance in dealing with formatting issues, keeping printers working, filing hard copies, ignoring occasional foul language – occasionally falling prey to it herself, and occasionally livening things up with an exclamation of “oh come on now, you just made that word up!” Bob Theriault assisted in many ways and now has a lifetime job, if he wants it, entering these references into Zotero. -

Perioperative Implication of the Endothelial Glycocalyx
Touro Scholar NYMC Faculty Publications Faculty 4-1-2018 Perioperative Implication of the Endothelial Glycocalyx Jong Wook Song Michael S. Goligorsky New York Medical College Follow this and additional works at: https://touroscholar.touro.edu/nymc_fac_pubs Part of the Medicine and Health Sciences Commons Recommended Citation Song, J., & Goligorsky, M. (2018). Perioperative Implication of the Endothelial Glycocalyx. Korean Journal of Anesthesiology, 71 (2), 92-102. https://doi.org/10.4097/kjae.2018.71.2.92 This Article is brought to you for free and open access by the Faculty at Touro Scholar. It has been accepted for inclusion in NYMC Faculty Publications by an authorized administrator of Touro Scholar. For more information, please contact [email protected]. Review Article pISSN 2005-6419 • eISSN 2005-7563 KJA Perioperative implication of the Korean Journal of Anesthesiology endothelial glycocalyx Jong Wook Song1,* and Michael S. Goligorsky2,* 1Department of Anesthesiology and Pain Medicine, Yonsei University College of Medicine, Seoul, Korea, 2Renal Research Institute and Departments of Medicine, Pharmacology, and Physiology, New York Medical College, Valhalla, NY, USA The endothelial glycocalyx (EG) is a gel-like layer lining the luminal surface of healthy vascular endothelium. Recent- ly, the EG has gained extensive interest as a crucial regulator of endothelial funtction, including vascular permeability, mechanotransduction, and the interaction between endothelial and circulating blood cells. The EG is degraded by vari- ous enzymes and reactive oxygen species upon pro-inflammatory stimulus. Ischemia-reperfusion injury, oxidative stress, hypervolemia, and systemic inflammatory response are responsible for perioperative EG degradation. Perioperative damage of the EG has also been demonstrated, especially in cardiac surgery. -

Appendix I Lunar and Martian Nomenclature
APPENDIX I LUNAR AND MARTIAN NOMENCLATURE LUNAR AND MARTIAN NOMENCLATURE A large number of names of craters and other features on the Moon and Mars, were accepted by the IAU General Assemblies X (Moscow, 1958), XI (Berkeley, 1961), XII (Hamburg, 1964), XIV (Brighton, 1970), and XV (Sydney, 1973). The names were suggested by the appropriate IAU Commissions (16 and 17). In particular the Lunar names accepted at the XIVth and XVth General Assemblies were recommended by the 'Working Group on Lunar Nomenclature' under the Chairmanship of Dr D. H. Menzel. The Martian names were suggested by the 'Working Group on Martian Nomenclature' under the Chairmanship of Dr G. de Vaucouleurs. At the XVth General Assembly a new 'Working Group on Planetary System Nomenclature' was formed (Chairman: Dr P. M. Millman) comprising various Task Groups, one for each particular subject. For further references see: [AU Trans. X, 259-263, 1960; XIB, 236-238, 1962; Xlffi, 203-204, 1966; xnffi, 99-105, 1968; XIVB, 63, 129, 139, 1971; Space Sci. Rev. 12, 136-186, 1971. Because at the recent General Assemblies some small changes, or corrections, were made, the complete list of Lunar and Martian Topographic Features is published here. Table 1 Lunar Craters Abbe 58S,174E Balboa 19N,83W Abbot 6N,55E Baldet 54S, 151W Abel 34S,85E Balmer 20S,70E Abul Wafa 2N,ll7E Banachiewicz 5N,80E Adams 32S,69E Banting 26N,16E Aitken 17S,173E Barbier 248, 158E AI-Biruni 18N,93E Barnard 30S,86E Alden 24S, lllE Barringer 29S,151W Aldrin I.4N,22.1E Bartels 24N,90W Alekhin 68S,131W Becquerei -

Irene Green,C.P.M Senior Contract Administrator, Capital Projects
AFFILIATED AGENCIES March 12, 2021 Orange County Transit District SUBJECT: Invitation for Bids (IFB) 1-3294 “ADA Access Improvements Local Transportation and Parking Lot Pavement Replacement at Fullerton Park Authority and Ride Service Authority for Freeway Emergencies Gentlemen/Ladies: Consolidated Transportation Service Agency Congestion Management This letter and its attachments comprise Addendum No. 1 to the above Agency captioned Invitation for Bids issued by the Orange County Transportation Service Authority for Authority (“Authority”). Abandoned Vehicles 1. Bidders are advised that the pre-bid conference will be held on March 17, 2021 at 11:30 am, attendance will be strictly limited to teleconference. Prospective bidders may call-in using the following credentials: • Call-in number: 714-560-5666 • Conference ID: 236238 2. Bidders are advised that a copy of pre-bid presentation slides are presented as Attachment A to this Addendum No. 1. 3. Bidders who plan to participate in the pre-bid conference remotely are requested to submit via e-mail to [email protected], no later than March 17, 2021 at 11am, the Pre-Bid Conference Registration Sheet which is presented as Attachment B to this Addendum No. 1. 4. Bidders are advised that the Disadvantaged Business Enterprise (DBE) Listing is presented as Attachment C to Addendum No. 1. This is a resource list of DBE’s within Authority’s market area. This list is not intended to be an all-inclusive list of DBE’s and/or subcontracting areas associated with this contract. Should you have any questions, please feel free to contact me at [email protected] or by phone at (714) 560-5317. -

SFRA Newsletter Dear Editor: I Fear My Patience Has Finally Been Exhausted Concerning the Unrelievedly Inept Reviews (Even When Favourable) of Works Pertaining to H
University of South Florida Scholar Commons Digital Collection - Science Fiction & Fantasy Digital Collection - Science Fiction & Fantasy Publications 3-1-1992 SFRA ewN sletter 195 Science Fiction Research Association Follow this and additional works at: http://scholarcommons.usf.edu/scifistud_pub Part of the Fiction Commons Scholar Commons Citation Science Fiction Research Association, "SFRA eN wsletter 195 " (1992). Digital Collection - Science Fiction & Fantasy Publications. Paper 138. http://scholarcommons.usf.edu/scifistud_pub/138 This Article is brought to you for free and open access by the Digital Collection - Science Fiction & Fantasy at Scholar Commons. It has been accepted for inclusion in Digital Collection - Science Fiction & Fantasy Publications by an authorized administrator of Scholar Commons. For more information, please contact [email protected]. The SFRA Review Published ten times a year for the Science Fiction Research Association by Alan Newcomer, Hypatia Press, Eugene, Oregon. Copyright © 1992 by the SFRA. Editorial correspondence: Betsy Harfst, Editor, SFRA Review, 2357 E. Calypso, Mesa, AZ 85204. Send changes of address and/or inquiries concerning subscriptions to the Treasurer, listed below. Note to Publishers: Please send fiction books for review to: Robert Collins, Dept. of English, Florida Atlantic University, Boca Raton, FL 33431-7588. Send non-fiction books for review to Neil Barron, 1149 Lime Place, Vista, CA 92083. Juvenile-Young Adult books for review to Muriel Becker, 60 Crane Street, Caldwell, NJ -

Jahresbericht 2013 Der Generaldirektion Der Staatlichen Naturwissenschaftlichen Sammlungen Bayerns Herausgegeben Von: Prof
Jahresbericht 2013 der Generaldirektion der Staatlichen Naturwissenschaftlichen Sammlungen Bayerns Herausgegeben von: Prof. Dr. Gerhard Haszprunar, Generaldirektor Generaldirektion der Staatlichen Naturwissenschaftlichen Sammlungen Bayerns (SNSB) Menzinger Straße 71, 80638 München München November 2014 Zusammenstellung und Endredaktion: Dr. Eva Maria Natzer (Generaldirektion) Unterstützung durch: Maria-Luise Kaim (Generaldirektion) Iris Krumböck (Generaldirektion) Katja Henßel (Generaldirektion) Druck: Digitaldruckzentrum, Amalienstrasse, München Inhaltsverzeichnis Bericht des Generaldirektors ...................................................................................................5 Wissenschaftliche Publikationen ................................................................................................7 Drittmittelübersicht ...................................................................................................................48 Organigramm ............................................................................................................................61 Generaldirektion .....................................................................................................................62 Personalvertretung ....................................................................................................................65 Museen Museum Mensch und Natur (MMN) ........................................................................................66 Museum Reich der Kristalle (MRK) ........................................................................................72 -

Sam Moskowitz a Bibliography and Guide
Sam Moskowitz A Bibliography and Guide Compiled by Hal W. Hall Sam Moskowitz A Bibliography and Guide Compiled by Hal W. Hall With the assistance of Alistair Durie Profile by Jon D. Swartz, Ph. D. College Station, TX October 2017 ii Online Edition October 2017 A limited number of contributor's copies were printed and distributed in August 2017. This online edition is the final version, updated with some additional entries, for a total of 1489 items by or about Sam Moskowitz. Copyright © 2017 Halbert W. Hall iii Sam Moskowitz at MidAmericon in 1976. iv Acknowledgements The sketch of Sam Moskowitz on the cover is by Frank R. Paul, and is used with the permission of the Frank R. Paul Estate, William F. Engle, Administrator. The interior photograph of Sam Moskowitz is used with the permission of the photographer, Dave Truesdale. A special "Thank you" for the permission to reproduce the art and photograph in this bibliography. Thanks to Jon D. Swartz, Ph. D. for his profile of Sam Moskowitz. Few bibliographies are created without the help of many hands. In particular, finding or confirming many of the fanzine writings of Moskowitz depended on the gracious assistance of a number of people. The following individuals went above and beyond in providing information: Alistair Durie, for details and scans of over fifty of the most elusive items, and going above and beyond in help and encouragement. Sam McDonald, for a lengthy list of confirmed and possible Moskowitz items, and for copies of rare articles. Christopher M. O'Brien, for over 15 unknown items John Purcell, for connecting me with members of the Corflu set. -
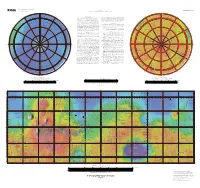
Topographic Map of Mars
U.S. DEPARTMENT OF THE INTERIOR OPEN-FILE REPORT 02-282 U.S. GEOLOGICAL SURVEY Prepared for the NATIONAL AERONAUTICS AND SPACE ADMINISTRATION 180° 0° 55° –55° Russell Stokes 150°E NOACHIS 30°E 210°W 330°W 210°E NOTES ON BASE smooth global color look-up table. Note that the chosen color scheme simply 330°E Darwin 150°W This map is based on data from the Mars Orbiter Laser Altimeter (MOLA) 30°W — 60° represents elevation changes and is not intended to imply anything about –60° Chalcoporous v (Smith and others 2001), an instrument on NASA’s Mars Global Surveyor Milankovic surface characteristics (e.g. past or current presence of water or ice). These two (MGS) spacecraft (Albee and others 2001). The image used for the base of this files were then merged and scaled to 1:25 million for the Mercator portion and Rupes map represents more than 600 million measurements gathered between 1999 1:15,196,708 for the two Polar Stereographic portions, with a resolution of 300 and 2001, adjusted for consistency (Neumann and others 2001 and 2002) and S dots per inch. The projections have a common scale of 1:13,923,113 at ±56° TIA E T converted to planetary radii. These have been converted to elevations above the latitude. N S B LANI O A O areoid as determined from a martian gravity field solution GMM2 (Lemoine Wegener a R M S s T u and others 2001), truncated to degree and order 50, and oriented according to IS s NOMENCLATURE y I E t e M i current standards (see below). -
How Welfare Recipients Succeed at CUNY
A Newsletter for The City University of New York • Summer 1996 How Welfare Recipients Bipartisan Workfare Bills Offered enator John J. Marchi (R-Staten Island) tances from campus or home. In May 1996 a Sand Assemblyman Roberto Ramirez (D- similar workfare program was instituted that Succeed at CUNY Bronx) have introduced legislation that would will negatively impact student recipients of oblige social service officials in New York to Aid to Families with Dependent Children. By Dr. Marilyn Gittell, 27,000 students were on welfare or in fami- allow CUNY and SUNY students receiving Co-sponsors of the Senate bill include public assistance to meet their "workfare" Senators Catharine M. Abate; Pedro Espada, Director of the Howard Samuels State lies that receive welfare. obligations on or near their own campuses. Jr.; Efrain Gonzalez, Jr.; Seymour Lachman; Management and Policy Center, GSUC The notion of extending the college oppor- "This bipartisan ef- Serphin R. Maltese; Marty Markwitz; David tunity to welfare recipients as a reliable fort is especially heart- Paterson; Ada L. Smith; Leonard P. Stavisky; ince its founding, The City Univer- route to financial independence is supported ening, because it will Guy Velella; and Dale M. Volker. sity has been a major provider of encourage thousands of Two SUNY campuses are already desig- by social research into the development of students to persevere nated as worksites, noted Sen. Marchi. "We S post-secondary education for the human capital. Even short spells at college need such designations across the state," he metropolitan area’s low- and middle-income and complete their col- make a difference in earning potential. -
Wij-Fiction-Novel Excerpt from Nightmares of Sasha Weitzwoman
Nightmares of Sasha Weitzwoman Novel Excerpt from Nightmares of Sasha Weitzwoman By Batya Weinbaum Synopsis Sasha Weitzwoman, a mid-thirties Jewish American feminist from the Northeastern US, leaves her dyke Jewish minister West Coast lover and returns to Jerusalem to seek a father for her child after the death of her father, while also covering the protests of the Women in Black at the time of the first Intifada. Unwittingly she takes up residence in a haunted hotel run by Isaac, a closeted Iranian Jew, with whom she becomes friendly. He introduces her to the gay underground, as well as to the sordid realities of Jerusalem. His cheap hotel he is filled largely with Holocaust survivors, which Sasha does not know when she first arrives. Newly available in its entirety, this novel in the making for nearly twenty years has been read at International Association for Fantasy in the Arts, National Women’s Studies Association, many local gatherings, and now here. Come take your part in a special session reading co-sponsored by the Gay/Lesbian/Queer Studies and Science Fiction/ Fantasy Areas. The novel has been excerpted in Bridges, Anything That Moves, Femspec, Lost on the Map of the World, Magic Realism, and other venues. What More Could a Ghost Ask SUZE FEELS ALREADY IN THAT DEATH of which she has been so pathologically afraid. And so out of a curiously strong instinct for self-preservation she has initiated the spiral of herself. Suze seeks no such comforting reassurances as did Rebekah below her in the glass. Rather, Suze has at last figured out how to hold on to suffering while she lets go of her body, and releases her spirit.