Tuners, Microphonics, and Control Systems in Superconducting Accelerating Structures Lawrence R
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Microphonics & Lorentz Detuning: Determined by Cavity/Cryomodule Design and Background Environment
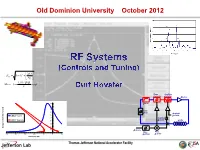
Old Dominion University October 2012 2 2 2 f opt (b 1) fo IRQQ(/) where b oocos V Phase Amplitude Controller Controller Klystron 1.0 Limiter 0.9 0.8 Loop 0.7 Phase Amplitude 0.6 CEBAF 6 GeV Set Point 0.5 Amplitude CEBAF Upgrade Detector 0.4 Cavity 0.3 0.2 Energy Content (Normalized)Content Energy 0.1 Reference Phase 0.0 Phase -1,000 -800 -600 -400 -200 0 200 Set Point Detector Detuning (Hz) • RF Systems • What are you controlling? • Cavity Equations • Control Systems Cavity Models • Algorithms Generator Driven Resonator (GDR) Self Excited Loop (SEL) • Hardware Receiver ADC/Jitter Transmitter Digital Signal Processing • Cavity Tuning & Resonance Control Stepper Motor Piezo • RF Systems are broken RF Control Power down into two parts. Electronics Amplifier • The high power section consisting of the power amplifier and the high power transmission line Waveguide/ (waveguide or coax) Coax • The Low power (level) section (LLRF) consisting of the field and resonance control components Cavity • Think your grandfathers “Hi-Fi” stereo or your guitar amp. • Intensity modulation of DC beam by control grid • Efficiency ~ 50-70% (dependent on operation Triode Tetrode mode) • Gain 10-20 dB • Frequency dc – 500 MHz • Power to 1 MW • Velocity modulation with input Cavity • Drift space and several cavities to achieve bunching • It is highly efficient DC to RF Conversion (50%+) • High gain >50 dB • CW klystrons typically have a modulating anode for - Gain control - RF drive power in saturation • Power: CW 1 MW, Pulsed 5 MW • Frequencies 300 MHz to 10 GHz+ A. Nassiri CW SCRF workshop 2012 • Intensity modulation of DC beam by control grid • It is highly efficient DC to RF Conversion approaching 70% • Unfortunately low gain 22 dB (max) • Power: CW to 80 kW • Frequencies 300 MHz to 1.5 GHz As a tetrode As a klystron A. -

MT-101: Decoupling Techniques
MT-101 TUTORIAL Decoupling Techniques WHAT IS PROPER DECOUPLING AND WHY IS IT NECESSARY? Most ICs suffer performance degradation of some type if there is ripple and/or noise on the power supply pins. A digital IC will incur a reduction in its noise margin and a possible increase in clock jitter. For high performance digital ICs, such as microprocessors and FPGAs, the specified tolerance on the supply (±5%, for example) includes the sum of the dc error, ripple, and noise. The digital device will meet specifications if this voltage remains within the tolerance. The traditional way to specify the sensitivity of an analog IC to power supply variations is the power supply rejection ratio (PSRR). For an amplifier, PSRR is the ratio of the change in output voltage to the change in power supply voltage, expressed as a ratio (PSRR) or in dB (PSR). PSRR can be referred to the output (RTO) or referred to the input (RTI). The RTI value is equal to the RTO value divided by the gain of the amplifier. Figure 1 shows how the PSR of a typical high performance amplifier (AD8099) degrades with frequency at approximately 6 dB/octave (20 dB/decade). Curves are shown for both the positive and negative supply. Although 90 dB at dc, the PSR drops rapidly at higher frequencies where more and more unwanted energy on the power line will couple to the output directly. Therefore, it is necessary to keep this high frequency energy from entering the chip in the first place. This is generally done with a combination of electrolytic capacitors (for low frequency decoupling), ceramic capacitors (for high frequency decoupling), and possibly ferrite beads. -

2. Capacitors Contents
2. Capacitors Contents 1 Capacitor 1 1.1 History ................................................. 2 1.2 Theory of operation .......................................... 2 1.2.1 Overview ........................................... 3 1.2.2 Hydraulic analogy ....................................... 3 1.2.3 Energy of electric field .................................... 4 1.2.4 Current–voltage relation ................................... 4 1.2.5 DC circuits .......................................... 4 1.2.6 AC circuits .......................................... 5 1.2.7 Laplace circuit analysis (s-domain) .............................. 5 1.2.8 Parallel-plate model ...................................... 5 1.2.9 Networks ........................................... 6 1.3 Non-ideal behavior .......................................... 7 1.3.1 Breakdown voltage ...................................... 7 1.3.2 Equivalent circuit ....................................... 7 1.3.3 Q factor ............................................ 8 1.3.4 Ripple current ......................................... 8 1.3.5 Capacitance instability .................................... 8 1.3.6 Current and voltage reversal ................................. 9 1.3.7 Dielectric absorption ..................................... 9 1.3.8 Leakage ............................................ 9 1.3.9 Electrolytic failure from disuse ................................ 9 1.4 Capacitor types ............................................ 9 1.4.1 Dielectric materials ..................................... -

Digital Low-Level Radio Frequency Control and Microphonics Mitigation of Superconducting Cavities
Digital Low-Level Radio Frequency Control and Microphonics Mitigation of Superconducting Cavities By Nathanael Robert Usher A THESIS Submitted to Michigan State University in partial fulfillment of the requirements for the degree of MASTER OF SCIENCE Department of Electrical and Computer Engineering 2007 ABSTRACT Digital Low-Level Radio Frequency Control and Microphonics Mitigation of Superconducting Cavities By Nathanael Robert Usher Superconducting Radio Frequency (SRF) cavities designed for proposed linear reaccel- erators at the National Superconducting Cyclotron Laboratory (NSCL) have an unloaded quality factor (Q) on the order of 109. The high Q results in a very narrow bandwidth, so small perturbations in the cavity’s resonant frequency result in large changes in the mag- nitude and phase of its electric field for a fixed frequency driving signal. As a result, it is necessary to use a controller that can compensate for perturbations as they occur. This project develops a new digital low-level radio frequency (LLRF) controller for this application, including DSP-based hardware, software algorithms, and a graphical user interface. The digital LLRF controller provides two types of control over cavity pertur- bations. The LLRF implements a PID control on the cavity driving signal to compensate for nonlinearities and small random disturbances. Significant cavity detuning caused by narrow-band vibrations, referred to as “microphonics,” are reduced by the LLRF controller using a piezoelectric tuner controlled by an adaptive feedforward cancellation algorithm. The completed prototype is a small, standalone, economically viable, ethernet con- nected controller. Through a MATLAB interface, it will allow advanced algorithm devel- opment by control engineers who are not necessarily familiar with the low-level workings of the controller. -
(Sns) Linac Rf System*
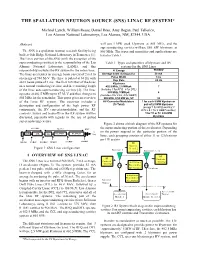
THE SPALLATION NEUTRON SOURCE (SNS) LINAC RF SYSTEM* Michael Lynch, William Reass, Daniel Rees, Amy Regan, Paul Tallerico, Los Alamos National Laboratorys, Los Alamos, NM, 87544, USA Abstract will use 5 MW peak klystrons at 805 MHz, and the superconducting cavities will use 550 kW klystrons at The SNS is a spallation neutron research facility being 805 MHz. The types and quantities and applications are built at Oak Ridge National Laboratory in Tennessee [1]. listed in Table 1. The Linac portion of the SNS (with the exception of the superconducting cavities) is the responsibility of the Los Table 1: Types and quantities of klystrons and HV Alamos National Laboratory (LANL), and this systems for the SNS Linac responsibility includes the RF system for the entire linac. H- Energy 968 MeV The linac accelerates an average beam current of 2 mA to Average beam during pulse 36 mA an energy of 968 MeV. The linac is pulsed at 60 Hz with Pulse Width 1 ms - Rep Rate 60 Hz an H beam pulse of 1 ms. The first 185 Mev of the linac Klystrons uses normal conducting cavities, and the remaining length 402.5 MHz, 2.5 MW pk 7 of the linac uses superconducting cavities [2]. The linac (includes 1 for RFQ , 6 for DTL) 805 MHz, 5 MW pk 6 operates at 402.5 MHz up to 87 MeV and then changes to (includes 4 for CCL, 2 for HEBT) 805 MHz for the remainder. This paper gives an overview 805 MHz, 0.55 MW pk, SC 92 of the Linac RF system. -
Data Sheet Rev. 0
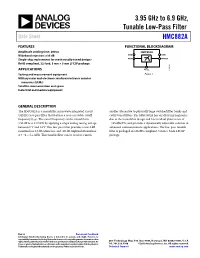
3.95 GHz to 6.9 GHz, Tunable Low-Pass Filter Data Sheet HMC882A FEATURES FUNCTIONAL BLOCKDIAGRAM Amplitude settling time: 200 ns HMC882A Wideband rejection: ≥35 dB GND GND Single-chip replacement for mechanically tuned designs RFIN RFOUT RoHS compliant, 32-lead, 5 mm × 5 mm LFCSP package APPLICATIONS VFCTL 17300-001 Testing and measurement equipment Figure 1. Military radar and electronic warfare/electronic counter measures (ECMs) Satellite communication and space Industrial and medical equipment GENERAL DESCRIPTION The HMC882A is a monolithic microwave integrated circuit smaller alternative to physically large switched filter banks and (MMIC) low-pass filter that features a user-selectable cutoff cavity tuned filters. The HMC882A has excellent microphonics frequency (f3dB). The cutoff frequency can be varied from due to the monolithic design and low residual phase noise of 3.95 GHz to 6.9 GHz by applying a single analog tuning voltage −165 dBc/Hz, and provides a dynamically adjustable solution in between 0 V and 14 V. This low-pass filter provides a low 3 dB advanced communications applications. The low-pass tunable insertion loss, 13 dB return loss, and >20 dB stopband attenuation filter is packaged in a RoHS compliant, 5 mm × 5mm LFCSP at 1.28 × f3dB GHz. This tunable filter can be used as a much package. Rev. 0 Document Feedback Information furnished by Analog Devices is believed to be accurate and reliable. However, no responsibility is assumed by Analog Devices for its use, nor for any infringements of patents or other rights of third parties that may result from its use. -

Advances in Class-I C0G MLCC and SMD Film Capacitors
Advances in Class-I C0G MLCC and SMD Film Capacitors Xilin Xu, Matti Niskala*, Abhijit Gurav, Mark Laps, Kimmo Saarinen*, Aziz Tajuddin, Davide Montanari**, Francesco Bergamaschi**, and Evangelista Boni** KEMET Electronics Corporation, 2835 KEMET Way, Simpsonville, SC 29681 Tel: +01-864-963-6307, Fax: +01-864-963-6492, e-mail: [email protected] * SMD products, Evox Rifa Group Oyj, a Kemet Company Lars Sonckin kaari 16, 02600 Espoo, Finland Tel: + 358 50 3873205, Fax: + 358 50 83873205, e-mail: [email protected] ** SMD Products, Arcotronics Group, a Kemet Company via San Lorenzo 19, 40037 Sasso Marconi (Bologna), Italy Tel: +39 51 939 220, Fax: +39 51 939 324, e-mail: [email protected] ABSTRACT For applications requiring low dielectric losses (or low DF), low acoustic noise (no piezoelectric effect) and good temperature stability of capacitance, the top two choices are Class-I C0G MLCC and SMD film capacitors. There have been recent advances in both C0G MLCCs and SMD film capacitors. The C0G MLCCs have benefited from base metal electrodes (BME) in combination with an improved ability to stack well over 400 layers in the MLCC, and have resulted in cost effective and volumetrically efficient ratings up to 1 μF. The SMD film capacitors have seen significant advances in capacitance and voltage extensions, as well as heat resistance under lead-free soldering conditions. This paper will discuss the technical basis for advances in each of these technologies and give some guidance on the optimum areas (capacitance, size, voltage) for the application of each technology. INTRODUCTION In applications where capacitance needs to be precisely controlled over a wide temperature range with low dielectric losses or low acoustic noise, thru-hole film capacitors have been the optimum choice. -

Transistor 1 Transistor
Transistor 1 Transistor A transistor is a semiconductor device used to amplify and switch electronic signals and electrical power. It is composed of semiconductor material with at least three terminals for connection to an external circuit. A voltage or current applied to one pair of the transistor's terminals changes the current through another pair of terminals. Because the controlled (output) power can be higher than the controlling (input) power, a transistor can amplify a signal. Today, some transistors are packaged individually, but many more are found embedded in integrated circuits. The transistor is the fundamental building block of modern electronic devices, and is ubiquitous in modern electronic systems. Following its development in the early 1950s, the transistor revolutionized the field of electronics, and paved the way for smaller and cheaper radios, calculators, and computers, among other Assorted discrete transistors. things. Packages in order from top to bottom: TO-3, TO-126, TO-92, SOT-23. History The thermionic triode, a vacuum tube invented in 1907, propelled the electronics age forward, enabling amplified radio technology and long-distance telephony. The triode, however, was a fragile device that consumed a lot of power. Physicist Julius Edgar Lilienfeld filed a patent for a field-effect transistor (FET) in Canada in 1925, which was intended to be a solid-state replacement for the triode.[1][2] Lilienfeld also filed identical patents in the United States in 1926[3] and 1928.[4][5] However, Lilienfeld did not publish any research articles about his devices nor did his patents cite any specific examples of a working prototype. -

Introduction to Transistors
Introduction to Transistors Edited by Research Lab 207, Science Building (School of Mathematics and Physics, Changzhou University, Changzhou, China) A transistor is a semiconductor device used to amplify and switch electronic signals. It is made of a solid piece of semiconductor material, with at least three terminals for connection to an external circuit. A voltage or current applied to one pair of the transistor's terminals changes the current flowing through another pair of terminals. Because the controlled (output) power can be much more than the controlling (input) power, the transistor provides amplification of a signal. Today, some transistors are packaged individually, but many more are found embedded in integrated circuits. Figure 1a. A replica of the first working transistor. The transistor is the fundamental building block of modern electronic devices, and is ubiquitous in modern electronic systems. Following its release in the early 1950s the transistor revolutionised the field of electronics, and paved the way for smaller and cheaper radios, calculators, and computers, amongst other things. Figure 1b. Assorted discrete transistors. Packages in order from top to bottom: TO-3, TO-126, TO-92, SOT-23 Table of Contents 1.History 2.Importance 3 Simplified operation 3.1 Transistor as a switch 3.2 Transistor as an amplifier 4 Comparison with vacuum tubes 4.1 Advantages 4.2 Limitations 5 Types 5.1 Bipolar junction transistor 5.2 Field-effect transistor 6 Construction 1. History Physicist Julius Edgar Lilienfeld filed the first patent for a transistor in Canada in 1925, describing a device similar to a Field Effect Transistor or "FET". -
Microphonics, Moisture, Etc
Mbius Microsystems MEMS and CMOS Approaches to Monolithic Timing and Frequency Synthesis University of Utah March 28, 2005 Michael S. McCorquodale, Ph.D. Chief Executive and Technology Officer Mobius Microsystems, Inc. Detroit, MI M. S. McCorquodale Mbius Microsystems Overview • An Overview of Timing and Frequency Synthesis • Critical Metrics • Entrenched Technologies • Emerging MEMS Approaches • CMOS Approaches • RF Clock Synthesis for the UMICH-WIMS µsystem • Mobius’ Clock Synthesis Technology • Future Work and Summary of Results 2of 79 M. S. McCorquodale Mbius Microsystems An Overview of Timing and Frequency Synthesis 3of 79 M. S. McCorquodale Mbius An Overview of Microsystems Timing and Frequency Synthesis Timing Every synchronous semiconductor component requires a clock to operate Frequency synthesis RF systems require precision frequency references for carrier frequency synthesis Bluetooth/LAN USB Print Server • USB XTAL clock reference • Ethernet XTAL clock reference • Processor XTAL clock reference • Bluetooth radio XTAL reference (on flip side) 4of 79 M. S. McCorquodale Mbius Frequency Synthesis Microsystems Approaches • The phase, delay, or injection locked “bottom-up” approach – Resonator (of some type) serves as a frequency reference – Sustaining oscillator provides a low frequency reference signal – PLL/DLL/ILL multiplies frequency by 2-4096x • Drawbacks with this approach – External components (1 resonator + 2 capacitors) • Expensive, large, pin interface – Reference oscillator required • Either included in PLL or design required – PLL dissipates substantial power to multiply frequency • Particularly true for large multiplication factors – Performance degrades as frequency increases • For multiplication factor N, noise increases by N2 (to be shown) – Lock and start-up time can be long (e.g. >10,000 cycles) 5of 79 M. -

Owner's Manual Bass Guitar Amplifier
V-4B Bass Guitar Amplifier 0 + 1 2 3 0 + ULTRA LO 220 HZ 8OO HZ 3OOO HZ ULTRA HI EQUALIZATION SS MODEL V-4B TDSK CUT BOOST 0 dB -15 dB GAIN BASS MIDRANGE TREBLE MASTER STANDBY POWER Owner’s Manual V-4B Bass Guitar Amplifier TABLE OF CONTENTS Important Safety Instructions .................................................2 Introduction / Features ..........................................................4 The Front Panel ....................................................................5 The Rear Panel .....................................................................7 Important Information About Tubes .........................................9 Troubleshooting / Block Diagram .........................................14 Technical Specifications / Service Information .......................15 IMPORTANT SAFETY INSTRUCTIONS been spilled or objects have fallen into the 1. Read these instructions. apparatus, the apparatus has been exposed to rain or moisture, does not operate normally, or 2. Keep these instructions. has been dropped. 3. Heed all warnings. 15. Do not overload wall outlets and extension 4. Follow all instructions. cords as this can result in a risk of fire or electric shock. 5. Do not use this apparatus near water. 16. This apparatus shall not be exposed to 6. Clean only with a dry cloth. dripping or splashing, and no object filled with 7. Do not block any ventilation openings. Install in liquids, such as vases or beer glasses, shall be accordance with the manufacturer’s instructions. placed on the apparatus. 8. Do not install near any heat sources such as 17. This apparatus has been designed with Class-I radiators, heat registers, stoves, or other construction and must be connected to a mains apparatus (including amplifiers) that produce heat. socket outlet with a protective earthing connection (the third grounding prong). 9. Do not defeat the safety purpose of the polarized or grounding-type plug. -
A Taste of Tubes: the Connoisseur’S Cookbook
$5.00 YOUR COMPLETE GUIDE TO A TASTE OF THE SENSORY DELIGHTS OF VACUUM TUBE AUDIO TECHNOLOGY T U B E S Written for tube lovers of all persuasions and levels of expertise. Presented for your enjoyment by: YOUR COMPLETE GUIDE TO THE SENSORY DELIGHTS OF VACUUM TUBE AUDIO TECHNOLOGY A TASTE OF T U B E S THE CONNOISSEUR’S COOKBOOK Written for tube lovers of all persuasions and levels of expertise. Presented for your enjoyment by SONIC FRONTIERS, INC. MANUFACTURER’S OF THE & TUBE ELECTRONIC PRODUCT LINES. COPYRIGHT AUGUST 1997 A TASTE OF TUBES: THE CONNOISSEUR’S COOKBOOK The Menu USING YOUR COOKBOOK Page iv APPETIZERSPage 2 Tube History I: A Foretaste of Tubes Page 5 Edison Discovers the Genie in the Lamp Page 5 Fleming’s Electronic Aerial Page 6 De Forest Conjures a Triode Page 6 Tubes on a Roll Page 8 Tube History II: Amplifiers Du Jour Page 9 Cocking Cooks Up Quality Page 9 Williamson Stirs the Pot Page 9 The Pentode’s Revenge Page 10 Quad’s Potent Pentode Recipe Page 10 McIntosh’s Pentode Pie`ce de Resistance Page 11 Hafler and Keroes Go Ultra Page 12 Cooking the Signal: Tubes or Transistors? Page 14 Cleaning the Kitchen Page 15 MEAT & POTATOES Page 16 “Let Them Eat Glass” (The Inner Workings of the Vacuum Tube) Page 19 Cordon Bleu 101: Thermionic Emission Page 20 Cleaning the Kitchen Page 21 Tubes for All Tastes: Spicing the Circuits Page 22 i. Diodes Page 22 ii. Triodes Page 22 Cordon Bleu 102: Cooking with Triodes Page 24 iii.