Industrial Circuit Board Design and Microprocessor Programming Bachelor of Science Thesis in Mechatronics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

PLM Weekly Summary Editor: Cimdata News Team 15 January 2021 Contents Cimdata News
PLM Weekly Summary Editor: CIMdata News Team 15 January 2021 Contents CIMdata News ............................................................................................................................................ 2 An Enterprise Digital Transformation Platform – a CIMdata Commentary......................................................2 Aras’ Cloud Strategy – a CIMdata Blog Post ....................................................................................................5 CIMdata Announces its 2021 PLM Market & Industry Forum Series ..............................................................6 CIMdata to Host a Free Webinar on CAD Trends ............................................................................................7 NLign Analytics “Structural Lifecycle Digital Environment” Enables Model-Driven Product Quality – a CIMdata Commentary .......................................................................................................................................8 PTC’s Cloud Strategy – a CIMdata Blog Post ................................................................................................. 13 Acquisitions .............................................................................................................................................. 14 Accenture Acquires Real Protect, Brazil-Based Information Security Company ........................................... 14 Atos to acquire In Fidem to reinforce its cybersecurity position in the North American market .................... 15 Planview -

IDF Exporter IDF Exporter Ii
IDF Exporter IDF Exporter ii April 27, 2021 IDF Exporter iii Contents 1 Introduction to the IDFv3 exporter 2 2 Specifying component models for use by the exporter 2 3 Creating a component outline file 4 4 Guidelines for creating outlines 6 4.1 Package naming ................................................ 6 4.2 Comments .................................................... 6 4.3 Geometry and Part Number entries ...................................... 7 4.4 Pin orientation and positioning ........................................ 7 4.5 Tips on dimensions ............................................... 8 5 IDF Component Outline Tools 8 5.1 idfcyl ....................................................... 9 5.2 idfrect ...................................................... 10 5.3 dxf2idf ...................................................... 11 6 idf2vrml 12 IDF Exporter 1 / 12 Reference manual Copyright This document is Copyright © 2014-2015 by it’s contributors as listed below. You may distribute it and/or modify it under the terms of either the GNU General Public License (http://www.gnu.org/licenses/gpl.html), version 3 or later, or the Creative Commons Attribution License (http://creativecommons.org/licenses/by/3.0/), version 3.0 or later. All trademarks within this guide belong to their legitimate owners. Contributors Cirilo Bernardo Feedback Please direct any bug reports, suggestions or new versions to here: • About KiCad document: https://gitlab.com/kicad/services/kicad-doc/issues • About KiCad software: https://gitlab.com/kicad/code/kicad/issues • About KiCad software i18n: https://gitlab.com/kicad/code/kicad-i18n/issues Publication date and software version Published on January 26, 2014. IDF Exporter 2 / 12 1 Introduction to the IDFv3 exporter The IDF exporter exports an IDFv3 1 compliant board (.emn) and library (.emp) file for communicating mechanical dimensions to a mechanical CAD package. -
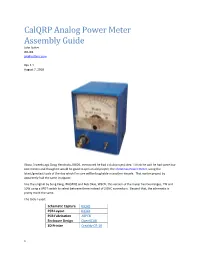
Calqrp Analog Power Meter Assembly Guide John Sutter W1JDS [email protected]
CalQRP Analog Power Meter Assembly Guide John Sutter W1JDS [email protected] Rev 1.1 August 7, 2018 About 3 weeks ago Doug Hendricks, KI6DS, mentioned he had a club project idea. I think he said he had some low cost meters and thought it would be good to spin an old project, the Christmas Power Meter, using the latest/greatest tools of the day which I’m sure will be laughable in another decade. That earlier project by apparently had the same instigator. Like the original by Song Kang, WA3AYQ and Bob Okas, W3CD, this version of the meter has two ranges, 1W and 10W using a SPDT switch to select between them instead of 2 BNC connectors. Beyond that, the schematic is pretty much the same. The tools I used: Schematic Capture KiCAD PCB Layout KiCAD PCB Fabrication AllPCB Enclosure Design OpenSCAD 3D Printer Creality CR-10 1 The Circuit As mentioned earlier the schematic matches the Christmas Power Meter pretty closely. SW1 is used to switch the power from the BNC connector into either the 10W load consisting of four 200 Ω 3 Watt carbon film resistors or the 1W load consisting of two 100 Ω ½ Watt carbon film resistors. The diodes are used as detectors with the resulting voltage filtered by the capacitors. The resistors are used to adjust the full-scale current to 200 μA. More on that later. FIGURE 1 SCHEMATIC A germanium diode was used on the 1 W range due to its lower voltage drop. More on that later. If you decide to use a through hole switch, the maximum shaft diameter is 6.3 mm. -

Minor Changes and Bug Fixes
List of fixed bugs in DipTrace 4.1.3.1 if compared to 4.1.3.0 PCB Layout 1. If IPC-7351 models are used, STEP export does not work. 2. When entering text into table cells "Shift + U" works as a Hotkey. 3. When importing KiCad 5.1 files, SMD pads on the Bottom layer may be imported incorrectly. Schematics 1. When entering text into table cells "Shift + U" works as a Hotkey.. 2. Back Annotate does not update supplier information. List of fixed bugs in DipTrace 4.1.3.0 if compared to 4.1.2.0 General 1. Snap EDA: multiple clicks for page switching result in a long "freezing". PCB Layout 4. The panelization parameters are reset when opening a schematic file in the PCB Layout after starting. 5. D-shape pads are displayed incorrectly in the Mirror mode. 6. The Highlight Net for the Obround and D-shape pads is displayed incorrectly in the Mirror mode. 7. TrueType text is shifted in BOM HTML. 8. DXF with multilayer blocks is imported incorrectly 9. Export of arcs with a very small angle and extra-large radius to Gerber has been changed. 10. Chamfer of the corners of a rectangular board outline may result in incorrect formation of outlines in Gerber when panelizing with Edge Rails. 11. After changing any of the markings parameters for a group of selected objects, the marking for selected Mounting Hole and Fiducial may appear. 12. Dimension objects are not updated automatically after changing the shape dimensions in the shape properties. -
Low-Cost Industrial Controller Based on the Raspberry Pi Platform
Low-cost Industrial Controller based on the Raspberry Pi platform Gustavo Mendonça de Morais Rabelo Vieira Dissertation presented to the School of Technology and Management of Bragança to obtain the Master Degree in Industrial Engineering. Work oriented by: Professor PhD Paulo Leitão Professor PhD José Barbosa Professor MsC Ulisses da Graça Bragança 2018-2019 ii Low-cost Industrial Controller based on the Raspberry Pi platform Gustavo Mendonça de Morais Rabelo Vieira Dissertation presented to the School of Technology and Management of Bragança to obtain the Master Degree in Industrial Engineering. Work oriented by: Professor PhD Paulo Leitão Professor PhD José Barbosa Professor MsC Ulisses da Graça Bragança 2018-2019 iv Dedication Este trabalho é dedicado a mulher mais trabalhadora que conheço, a quem admiro muito e me inspira imensamente desde criança, minha querida e amada avó Terezinha Mendonça de Morais, singularmente importante em minha vida. À minha mãe Janaína, à minha tia Gildete, melhores amigas que sempre me ofereceram apoio a perseverar em minhas conquistas. Aos meus queridos irmãos mais novos, Lucas e Vitor que me orgulham pelas pessoas que estão se tornando e por toda a companhia que tive o prazer de desfrutar durante o nosso crescimento. v vi Acknowledgements Agradeço a todo o apoio e suporte que tive da minha família por me proporcionar a oportunidade de chegar até aqui. Aos meus professores orientadores José Barbosa e Paulo Leitão pela rica e experiente orientação. A todos os amigos, colegas e professores que foram sumariamente importantes para o sucesso da realização deste trabalho. vii viii Abstract The low-cost automation field exhibits the need of innovation both in terms of hardware and software. -

Metadefender Core V4.17.3
MetaDefender Core v4.17.3 © 2020 OPSWAT, Inc. All rights reserved. OPSWAT®, MetadefenderTM and the OPSWAT logo are trademarks of OPSWAT, Inc. All other trademarks, trade names, service marks, service names, and images mentioned and/or used herein belong to their respective owners. Table of Contents About This Guide 13 Key Features of MetaDefender Core 14 1. Quick Start with MetaDefender Core 15 1.1. Installation 15 Operating system invariant initial steps 15 Basic setup 16 1.1.1. Configuration wizard 16 1.2. License Activation 21 1.3. Process Files with MetaDefender Core 21 2. Installing or Upgrading MetaDefender Core 22 2.1. Recommended System Configuration 22 Microsoft Windows Deployments 22 Unix Based Deployments 24 Data Retention 26 Custom Engines 27 Browser Requirements for the Metadefender Core Management Console 27 2.2. Installing MetaDefender 27 Installation 27 Installation notes 27 2.2.1. Installing Metadefender Core using command line 28 2.2.2. Installing Metadefender Core using the Install Wizard 31 2.3. Upgrading MetaDefender Core 31 Upgrading from MetaDefender Core 3.x 31 Upgrading from MetaDefender Core 4.x 31 2.4. MetaDefender Core Licensing 32 2.4.1. Activating Metadefender Licenses 32 2.4.2. Checking Your Metadefender Core License 37 2.5. Performance and Load Estimation 38 What to know before reading the results: Some factors that affect performance 38 How test results are calculated 39 Test Reports 39 Performance Report - Multi-Scanning On Linux 39 Performance Report - Multi-Scanning On Windows 43 2.6. Special installation options 46 Use RAMDISK for the tempdirectory 46 3. -
Getting Started in Kicad Getting Started in Kicad Ii
Getting Started in KiCad Getting Started in KiCad ii April 27, 2021 Getting Started in KiCad iii Contents 1 Introduction to KiCad 1 1.1 Downloading and installing KiCad ...................................... 2 1.1.1 Under GNU/Linux ........................................... 2 1.1.2 Under Apple macOS .......................................... 3 1.1.3 Under Windows ............................................ 3 1.2 Support ..................................................... 3 2 KiCad Workflow 4 2.1 Overview .................................................... 4 2.2 Forward and backward annotation ...................................... 6 3 Using KiCad 7 3.1 Shortcut keys .................................................. 7 3.1.1 Accelerator keys ............................................ 7 3.1.2 Hotkeys ................................................. 7 3.1.3 Example ................................................. 8 4 Draw electronic schematics 9 4.1 Using Eeschema ................................................. 9 4.2 Bus connections in KiCad ........................................... 21 5 Layout printed circuit boards 23 5.1 Using Pcbnew .................................................. 23 5.2 Generate Gerber files .............................................. 29 5.3 Using GerbView ................................................ 29 5.4 Automatically route with FreeRouter ..................................... 29 Getting Started in KiCad iv 6 Forward annotation in KiCad 31 7 Make schematic symbols in KiCad 33 7.1 Using Component -

PCB CAD / EDA Software and Where to Get It……
Useful engineering information from Sphere Research Corporation By: walter shawlee 2 PCB CAD / EDA Software and where to get it…… Fortunately for cash-strapped engineering students, most commercial packages have demo versions of the real software, or are completely free open source software. Keep in mind, the critical issue is the WORK , not the TOOL . If you understand the ideas, you can learn any package, although each tool has its own internal capabilities, issues and quirks to master. Here are some of the major paid packages in use today: Altium Designer from Altium, see: http://www.altium.com/en/products/downloads Evaluate: http://www.altium.com/free-trial Also, they own the legacy apps, P-cad , Protel and Easytrax , see them here: http://techdocs.altium.com/display/ALEG/Legacy+Downloads OrCAD from Cadence, see: http://www.orcad.com/ Evaluate: http://www.orcad.com/buy/try-orcad-for-free Eagle from CadSoft, see: http://www.cadsoftusa.com/eagle-pcb-design-software/about-eagle/ Evaluate (freeware version): http://www.cadsoftusa.com/download-eagle/freeware/ Pads from Mentor Graphics, see: http://www.mentor.com/pcb/pads/ Evaluate: http://www.pads.com/try.html?pid=mentor Here are key Open-Source Free PCB CAD packages: KiCad , see: http://www.kicad- pcb.org/display/KICAD/KiCad+EDA+Software+Suite key packages: Eeschema, PCBnew, Gerbview Works on all platforms. DESIGNSPARK , see: http://www.rs-online.com/designspark/electronics/ They also have a free mechanical design package. Linux operation using WINE and Mac operation using Crossover or Play On Mac is noted as possible, but not directly supported. -

An Automated Framework for Board-Level Trojan Benchmarking
An Automated Framework for Board-level Trojan Benchmarking Tamzidul Hoque, Shuo Yang, Aritra Bhattacharyay, Jonathan Cruz, and Swarup Bhunia Department of Electrical and Computer Engineering University of Florida, Gainesville, Florida 32611 Email: fthoque, sy, abhattacharyay, jonc205g@ufl.edu, [email protected]fl.edu Abstract—Economic and operational advantages have led the the trustworthiness of modern electronic system. This threat supply chain of printed circuit boards (PCBs) to incorporate calls for effective countermeasures that can prevent, detect, various untrusted entities. Any of the untrusted entities are ca- and tolerate such attacks. While a vast amount of research pable of introducing malicious alterations to facilitate a functional failure or leakage of secret information during field operation. has explored the various facets of malicious circuits inside While researchers have been investigating the threat of malicious individual microelectronic components, a more complex attack modification within the scale of individual microelectronic com- vector that introduces board-level malicious functionalities has ponents, the possibility of a board-level malicious manipulation received little to no attention [2]. has essentially been unexplored. In the absence of standard Modeling the attack vector is a critical step towards assuring benchmarking solutions, prospective countermeasures for PCB trust assurance are likely to utilize homegrown representation of trust at the PCB-level. The construction and behavior of the attacks that undermines their evaluation and does not provide malicious circuits can be completely different depending on scope for comparison with other techniques. In this paper, we which entities in the PCB supply chain we assume to be have developed the first-ever benchmarking solution to facilitate untrusted. -

ODROID-XU4 Case
CloudShell 2 • Home Automation • Cloud Print • ODROID-XU4 Case Year Four Issue #40 Apr 2017 ODROIDMagazine MeetMeet WALTER:WALTER: TheThe vintagevintage lookinglooking robotrobot poweredpowered byby youryour ODROIDODROID Laptop Celebrating Forty issues of ODROID with Magazine: ODROID- A retrospective of C1+/C2 all our publications What we stand for. We strive to symbolize the edge of technology, future, youth, humanity, and engineering. Our philosophy is based on Developers. And our efforts to keep close relationships with developers around the world. For that, you can always count on having the quality and sophistication that is the hallmark of our products. Simple, modern and distinctive. So you can have the best to accomplish everything you can dream of. We are now shipping the ODROID-C2 and ODROID-XU4 devices to EU countries! Come and visit our online store to shop! Address: Max-Pollin-Straße 1 85104 Pförring Germany Telephone & Fax phone: +49 (0) 8403 / 920-920 email: [email protected] Our ODROID products can be found at http://bit.ly/1tXPXwe EDITORIAL elcome to our 40th issue! When we started publishing the magazine in 2014, there were only two people, Bru- Wno and Rob Roy, producing ODROID Magazine. We’ve since grown the team to eight people and publish in both English and Spanish. We are continually amazed by the creative and in- novative projects that the ODROID community sends our way for pub- lication, and do our best to educate the open source hacking communi- ty with a variety of software and hard- ware articles. Our featured project this month is an amazing retro-looking robot named Walter. -

Intro to PCB-Design-Tutorial
Intro to PCB Design Objectives In this tutorial we’ll design a printed circuit board (PCB) in Eagle. This PCB will be an Arduino shield - a board that sandwiches with an Arduino microcontroller to provide extra functionality. The PCB will have a collection of LEDs on it that can be controlled from the arduino. ● Get familiar with the process and vocabulary of PCB design ● Learn how to use Eagle ● Lay a foundation that you can build off of to do more complex PCB design in the future You can learn more about Arduino shields here: https://learn.sparkfun.com/tutorials/arduino-shields/all Questions? Email: [email protected] or [email protected] Getting Started There are many different PCB design softwares, such as the following: ● Eagle ● Altium ● Cadence ● KiCAD ● CircuitMaker Eagle, KiCAD, and CircuitMaker have free versions. Altium and Cadence are both really powerful and customizable, but this makes them more difficult to learn on. The free version of Eagle is pretty user friendly and straightforward to learn on and provides the functionality we need for the workshop, so that’s what we’re going to use. 1. Download Eagle from the autodesk website: https://www.autodesk.com/products/eagle/free-download 2. After you download it, either create an Autodesk account or sign in with yours. After this is complete, Eagle will open in the Control Panel view. The Control Panel is your home base in Eagle. This is where you can create and access your projects and libraries. Libraries are files that contain part descriptions: what is the symbol that represents the part and what does the part’s physical footprint need to look like. -

NAME SYNOPSIS DESCRIPTION Orcad Convert OPTIONS
orcad_convert(1) Schematic converter to KiCad eeschema and gEDAgschem orcad_convert(1) NAME orcad_convert −convert OrCAD L.P.SDT III/IV source libraries and schematics to KiCad / gEDA SYNOPSIS orcad_convert [ options ][input_file ][output_file ] orcad_lib_convert [ options ][input_file ][[ output_file ]] DESCRIPTION orcad_convert will dump the contents of an OrCAD L.P.SDT III/IV schematic (.sch) input_file or will convert it to a KiCad eeschema or gEDAgschem text-based schematic format in output_file.If input_file is not specified, standard input will be read. If output_file is not specified, standard output is used. orcad_lib_convert will dump the contents of an OrCAD L.P.SDT III/IV library source (.src) input_file or will convert it to a KiCad component library (.lib) output_file or to gEDAsymbol files (.sym) in directories having the same name as the input library file. In this last case, output_file is not specified. If input_file is not specified, standard input will be read. If output_file is not specified, standard output is used (KiCad and listing only). orcad_convert OPTIONS (no option) outputs interpreted schematic file information −h displays program and option information −s input file statistics; activated with -V −g gEDA(gschem) output format −k KiCad (eeschema) output format −m module ports connected on both sides (KiCad output only,see MODULE PORTS) −n module ports translated into named nets (KiCad and gEDAoutput) −V additional debug information is output orcad_lib_convert OPTIONS (no option) outputs a parsed version of the input file −h displays program and option information −g gEDAsymbol files (.sym) output in per-library directories under the same name −k KiCad component library (.lib) output −p power pins are visible (default is invisible) −s file statistics −V additional debug information is output; if -V (verbose) is used along with the -g (gEDA) or -k (Ki- Cad) output options, debug information will be included in the output file(s) as comments.