ODROID-XU4 Case
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Mitcalc Brochure
MITCalc is a multi-language set of mechanical, industrial and technical calculations for the day-to-day routines. It will reliably, precisely, and most of all quickly guide customer through the design of components, the solution of a technical problem, or a calculation of an engineering point without any significant need for expert knowledge. MITCalc contains both design and check calculations of many common tasks, such as: tooth, belt, and chain gear, beam, shaft, springs, bolt connection, shaft connection and many others. There are also many material, comparison, and decision tables, including a system for the administration of resolved tasks. The calculations support both Imperial and Metric units and are processed according to ANSI, ISO, DIN, BS, CSN and Japanese standards. It is an open system designed in Microsoft Excel which allows not only easy user-defined modifications and user extensions without any programming skills, but also mutual interconnection of the calculations, which is unique in the development of tailor-made complex calculations. The sophisticated interaction with many 2D (AutoCAD, AutoCAD LT, IntelliCAD, Ashlar Graphite, TurboCAD) and 3D (Autodesk Inventor, SolidWorks, Solidedge) CAD systems allows the relevant drawing to be developed or 3D models to be inserted in a few seconds. OEM licensing of selected calculations or the complete product is available as well. MITCalc installation packages are available at www.mitcalc.com and after installation customer have 30 days to freely test the product. CAD support 2D CAD systems: Most of the calculations allow direct output to major 2D CAD systems. Just choose your CAD system in the calculation and select the desired view (a projection type). -
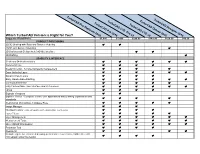
Which Turbocad Version Is Right for You?
TurboCAD Pro Platinum 2016 TurboCAD Designer 2016 TurboCAD LTE Pro v9 TurboCAD Deluxe 2016 TurboCAD Pro 2016 TurboCAD LTE v9 Which TurboCAD Version is Right for You? Suggested Retail Price $1,695 $1,495 $299.99 $149.99 $129.99 $49.99 PRODUCT POSITIONING 2D/3D Drafting with Solid and Surface Modeling a a 2D/3D with Surface Modeling a 2D Drafting with Default AutoCAD-like Interface a a 2D Drafting a USABILITY & INTERFACE 32-bit and 64-bit bit versions a a a a a a Command Line a a a a Design Director - for object property management a a a a Draw Order by Layer a a a a a a Dynamic Input Cursor a a a a Easy, Handle-Based Editing a a a a a a Conceptual Selector a a a a a Fully Customizable User Interface and Preferences a a a a a a ePack a a a a Explode Viewports a a Explorer Palette - Complete control over applicationa and Drawing organization and a a a a standards Geolocation of drawings, Compase Rose a a a a a Image Manager a a a Intelligent Cursor - data entry points and feedback visible next to cursor a a a a Layer Filters a a a a a Layer Management a a a a a a Measurement Tools a a a a a a Object SNAP Prioritization a a a a a a Protractor Tool a a a a Flexible UI a a a a Redsdk engine for enhanced drawing performance in wireframe, hidden line and a a a a conceptual rendering viewing TurboCAD Pro Platinum 2016 TurboCAD Designer 2016 TurboCAD LTE Pro v9 TurboCAD Deluxe 2016 TurboCAD Pro 2016 TurboCAD LTE v9 Which TurboCAD Version is Right for You? Transparent and Bit-mapped Fills a a a a True Units Retained between Drawings with Different -

PLM Weekly Summary Editor: Cimdata News Team 15 January 2021 Contents Cimdata News
PLM Weekly Summary Editor: CIMdata News Team 15 January 2021 Contents CIMdata News ............................................................................................................................................ 2 An Enterprise Digital Transformation Platform – a CIMdata Commentary......................................................2 Aras’ Cloud Strategy – a CIMdata Blog Post ....................................................................................................5 CIMdata Announces its 2021 PLM Market & Industry Forum Series ..............................................................6 CIMdata to Host a Free Webinar on CAD Trends ............................................................................................7 NLign Analytics “Structural Lifecycle Digital Environment” Enables Model-Driven Product Quality – a CIMdata Commentary .......................................................................................................................................8 PTC’s Cloud Strategy – a CIMdata Blog Post ................................................................................................. 13 Acquisitions .............................................................................................................................................. 14 Accenture Acquires Real Protect, Brazil-Based Information Security Company ........................................... 14 Atos to acquire In Fidem to reinforce its cybersecurity position in the North American market .................... 15 Planview -

Metadefender Core V4.12.2
MetaDefender Core v4.12.2 © 2018 OPSWAT, Inc. All rights reserved. OPSWAT®, MetadefenderTM and the OPSWAT logo are trademarks of OPSWAT, Inc. All other trademarks, trade names, service marks, service names, and images mentioned and/or used herein belong to their respective owners. Table of Contents About This Guide 13 Key Features of Metadefender Core 14 1. Quick Start with Metadefender Core 15 1.1. Installation 15 Operating system invariant initial steps 15 Basic setup 16 1.1.1. Configuration wizard 16 1.2. License Activation 21 1.3. Scan Files with Metadefender Core 21 2. Installing or Upgrading Metadefender Core 22 2.1. Recommended System Requirements 22 System Requirements For Server 22 Browser Requirements for the Metadefender Core Management Console 24 2.2. Installing Metadefender 25 Installation 25 Installation notes 25 2.2.1. Installing Metadefender Core using command line 26 2.2.2. Installing Metadefender Core using the Install Wizard 27 2.3. Upgrading MetaDefender Core 27 Upgrading from MetaDefender Core 3.x 27 Upgrading from MetaDefender Core 4.x 28 2.4. Metadefender Core Licensing 28 2.4.1. Activating Metadefender Licenses 28 2.4.2. Checking Your Metadefender Core License 35 2.5. Performance and Load Estimation 36 What to know before reading the results: Some factors that affect performance 36 How test results are calculated 37 Test Reports 37 Performance Report - Multi-Scanning On Linux 37 Performance Report - Multi-Scanning On Windows 41 2.6. Special installation options 46 Use RAMDISK for the tempdirectory 46 3. Configuring Metadefender Core 50 3.1. Management Console 50 3.2. -

Systémy Cad a Jejich Srovnání S Ohledem Na Výuku Technické Grafiky Na Základní Škole
MASARYKOVA UNIVERZITA V BRNĚ PEDAGOGICKÁ FAKULTA KATEDRA TECHNICKÉ A INFORMAČNÍ VÝCHOVY SYSTÉMY CAD A JEJICH SROVNÁNÍ S OHLEDEM NA VÝUKU TECHNICKÉ GRAFIKY NA ZÁKLADNÍ ŠKOLE BAKALÁŘSKÁ PRÁCE Havlíčkův Brod 2013 VEDOUCÍ PRÁCE: Ing. Zdeněk Hodis, Ph.D AUTOR PRÁCE: Adam Dolejš strana | ii Abstrakt Tato bakalářská práce by měla čtenáře seznámit se softwarem typu CAD a převážně jeho využitím ve školství. V práci bude ukázáno několik typů komerčních i freewarových programů, popsáno jak s nimi pracovat a jaké jsou mezi nimi rozdíly. V textu budou rozebrány funkce, užití, styl zobrazení, přehlednost panelů či vzhled pracovní plochy. V přílohách práce budou poté představeny vybrané CAD programy, včetně ukázek práce s nimi. Klíčová slova Konstruování, technické kreslení, CAD, AutoCAD, ProgeCAD, 2D CAD, technický výkres, licence, porovnání strana | iii Abstract This thesis should familiarise the readers with the CAD software and highlight its significance in the educational. The thesis will introduce and compare several types of CAD software, both commercial and freeware. These will be described with regard to their features, use, visual style, user-friendliness, and workspace layout. In addition, by the means of practical demonstrations, the readers will be given an opportunity to become acquainted with a specific CAD program. Key words Design, technical drawing, CAD, AutoCAD, ProgeCAD, 2D CAD, license, comparison strana | iv Prohlášení Prohlašuji, že jsem bakalářskou práci vypracoval samostatně, a to pouze za použití citovaných pramenů, dalších informací a zdrojů v souladu s Disciplinárním řádem pro studenty Pedagogické fakulty Masarykovy univerzity a se zákonem č. 121/2000 Sb., o právu autorském, o právech souvisejících s právem autorským a o změně některých zákonů (autorský zákon), ve znění pozdějších předpisů. -

A Hardware Abstraction Layer in Java
A Hardware Abstraction Layer in Java MARTIN SCHOEBERL Vienna University of Technology, Austria STEPHAN KORSHOLM Aalborg University, Denmark TOMAS KALIBERA Purdue University, USA and ANDERS P. RAVN Aalborg University, Denmark Embedded systems use specialized hardware devices to interact with their environment, and since they have to be dependable, it is attractive to use a modern, type-safe programming language like Java to develop programs for them. Standard Java, as a platform independent language, delegates access to devices, direct memory access, and interrupt handling to some underlying operating system or kernel, but in the embedded systems domain resources are scarce and a Java virtual machine (JVM) without an underlying middleware is an attractive architecture. The contribution of this paper is a proposal for Java packages with hardware objects and interrupt handlers that interface to such a JVM. We provide implementations of the proposal directly in hardware, as extensions of standard interpreters, and finally with an operating system middleware. The latter solution is mainly seen as a migration path allowing Java programs to coexist with legacy system components. An important aspect of the proposal is that it is compatible with the Real-Time Specification for Java (RTSJ). Categories and Subject Descriptors: D.4.7 [Operating Systems]: Organization and Design—Real-time sys- tems and embedded systems; D.3.3 [Programming Languages]: Language Classifications—Object-oriented languages; D.3.3 [Programming Languages]: Language Constructs and Features—Input/output General Terms: Languages, Design, Implementation Additional Key Words and Phrases: Device driver, embedded system, Java, Java virtual machine 1. INTRODUCTION When developing software for an embedded system, for instance an instrument, it is nec- essary to control specialized hardware devices, for instance a heating element or an inter- ferometer mirror. -

Modeling of Hardware and Software for Specifying Hardware Abstraction
Modeling of Hardware and Software for specifying Hardware Abstraction Layers Yves Bernard, Cédric Gava, Cédrik Besseyre, Bertrand Crouzet, Laurent Marliere, Pierre Moreau, Samuel Rochet To cite this version: Yves Bernard, Cédric Gava, Cédrik Besseyre, Bertrand Crouzet, Laurent Marliere, et al.. Modeling of Hardware and Software for specifying Hardware Abstraction Layers. Embedded Real Time Software and Systems (ERTS2014), Feb 2014, Toulouse, France. hal-02272457 HAL Id: hal-02272457 https://hal.archives-ouvertes.fr/hal-02272457 Submitted on 27 Aug 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Modeling of Hardware and Software for specifying Hardware Abstraction Layers Yves BERNARD1, Cédric GAVA2, Cédrik BESSEYRE1, Bertrand CROUZET1, Laurent MARLIERE1, Pierre MOREAU1, Samuel ROCHET2 (1) Airbus Operations SAS (2) Subcontractor for Airbus Operations SAS Abstract In this paper we describe a practical approach for modeling low level interfaces between software and hardware parts based on SysML operations. This method is intended to be applied for the development of drivers involved on what is classically called the “hardware abstraction layer” or the “basic software” which provide high level services for resources management on the top of a bare hardware platform. -

IDF Exporter IDF Exporter Ii
IDF Exporter IDF Exporter ii April 27, 2021 IDF Exporter iii Contents 1 Introduction to the IDFv3 exporter 2 2 Specifying component models for use by the exporter 2 3 Creating a component outline file 4 4 Guidelines for creating outlines 6 4.1 Package naming ................................................ 6 4.2 Comments .................................................... 6 4.3 Geometry and Part Number entries ...................................... 7 4.4 Pin orientation and positioning ........................................ 7 4.5 Tips on dimensions ............................................... 8 5 IDF Component Outline Tools 8 5.1 idfcyl ....................................................... 9 5.2 idfrect ...................................................... 10 5.3 dxf2idf ...................................................... 11 6 idf2vrml 12 IDF Exporter 1 / 12 Reference manual Copyright This document is Copyright © 2014-2015 by it’s contributors as listed below. You may distribute it and/or modify it under the terms of either the GNU General Public License (http://www.gnu.org/licenses/gpl.html), version 3 or later, or the Creative Commons Attribution License (http://creativecommons.org/licenses/by/3.0/), version 3.0 or later. All trademarks within this guide belong to their legitimate owners. Contributors Cirilo Bernardo Feedback Please direct any bug reports, suggestions or new versions to here: • About KiCad document: https://gitlab.com/kicad/services/kicad-doc/issues • About KiCad software: https://gitlab.com/kicad/code/kicad/issues • About KiCad software i18n: https://gitlab.com/kicad/code/kicad-i18n/issues Publication date and software version Published on January 26, 2014. IDF Exporter 2 / 12 1 Introduction to the IDFv3 exporter The IDF exporter exports an IDFv3 1 compliant board (.emn) and library (.emp) file for communicating mechanical dimensions to a mechanical CAD package. -
Introduction to Fmxlinux Delphi's Firemonkey For
Introduction to FmxLinux Delphi’s FireMonkey for Linux Solution Jim McKeeth Embarcadero Technologies [email protected] Chief Developer Advocate & Engineer For quality purposes, all lines except the presenter are muted IT’S OK TO ASK QUESTIONS! Use the Q&A Panel on the Right This webinar is being recorded for future playback. Recordings will be available on Embarcadero’s YouTube channel Your Presenter: Jim McKeeth Embarcadero Technologies [email protected] | @JimMcKeeth Chief Developer Advocate & Engineer Agenda • Overview • Installation • Supported platforms • PAServer • SDK & Packages • Usage • UI Elements • Samples • Database Access FireDAC • Migrating from Windows VCL • midaconverter.com • 3rd Party Support • Broadway Web Why FMX on Linux? • Education - Save money on Windows licenses • Kiosk or Point of Sale - Single purpose computers with locked down user interfaces • Security - Linux offers more security options • IoT & Industrial Automation - Add user interfaces for integrated systems • Federal Government - Many govt systems require Linux support • Choice - Now you can, so might as well! Delphi for Linux History • 1999 Kylix: aka Delphi for Linux, introduced • It was a port of the IDE to Linux • Linux x86 32-bit compiler • Used the Trolltech QT widget library • 2002 Kylix 3 was the last update to Kylix • 2017 Delphi 10.2 “Tokyo” introduced Delphi for x86 64-bit Linux • IDE runs on Windows, cross compiles to Linux via the PAServer • Designed for server side development - no desktop widget GUI library • 2017 Eugene -
A Full Stack Approach to FPGA Integration in the Cloud
This article has been accepted for publication in a future issue of this journal, but has not been fully edited. Content may change prior to final publication. Citation information: DOI 10.1109/MM.2018.2877290, IEEE Micro THEME ARTICLE: HARDWARE ACCELERATION Galapagos: A Full Stack Approach to FPGA Integration in the Cloud Naif Tarafdar Field-Programmable Gate Arrays (FPGAs) have University of Toronto shown to be quite beneficial in the cloud due to their Nariman Eskandari energy-efficient application-specific acceleration. University of Toronto These accelerators have always been difficult to use Varun Sharma University of Toronto and at cloud scale, the difficulty of managing these Charles Lo devices scales accordingly. We approach the University of Toronto challenge of managing large FPGA accelerator Paul Chow clusters in the cloud using abstraction layers and a University of Toronto new hardware stack that we call Galapagos. The hardware stack abstracts low-level details while providing flexibility in the amount of low-level access users require to reach their performance needs. Computing today has evolved towards using large-scale data centers that are the basis of what many call the cloud. Within the cloud, large-scale applications for Big Data and machine learn- ing can use thousands of processors. At this scale, even small efficiency gains in performance and power consumption can translate to significant amounts. In the data center, power consump- tion is particularly important as 40 % of the costs are due to power and cooling [1]. Accelerators, which are more efficient for classes of computations, have become an important approach to ad- dressing both performance and power efficiency. -

Industrial Circuit Board Design and Microprocessor Programming Bachelor of Science Thesis in Mechatronics
Industrial circuit board design and microprocessor programming Bachelor of Science thesis in Mechatronics FREDRIK HÖGBERG Department of Signals and Systems CHALMERS UNIVERSITY OF TECHNOLOGY Gothenburg, Sweden 2017 REPORT NO. XXXX XXXX Industrial circuit boar! design and %icroprocessor pro$ram%in$ FREDRIK HÖGBERG Depart%ent of Signal and S'ste%s CH)*MERS UNI,ERSIT- OF TE(HNO*OG- Gothenbur$, S/eden 2017 Industrial circuit board design and microprocessor pro$ra%%in$ FREDRIK HÖGBERG FREDRIK HÖGBERG, 2017 Technical report no xxxx544 Depart%ent of Signals and S'ste%s Chal%ers +ni6ersit' of Technolo$' SE-412 96 G;tebor$ S/eden Telephone + 46 (0)31-772 1000 (o6er5 Hot Screen 2000 is an industrial heat press machine that can be used to attach screen prints on clothin$. This thesis will go in to details on ho/ the circuit board and pro$ra% was ma!e for this %achine. Chal%ers Reproservice G;tebor$. S/eden 2017 CHALMERS Signals and Systems, Bachelor@s Thesis XXXX5XX I Abstract The %ain obAect of this proAect is to design and %aBe circuitr' to control a industrial heat press %achine. The circuitr' consist of a 0 la'er boar! containin$ a %icro controller. displa' %odule. )( DC module. te%perature controller and electronics to control electromechanical devices. The fra%e of reference /ill $o through the basics steps in designin$ and %anufacturin$ electrical circ"itry /ith digital and analo$ technolo$y and explain the basics of the most com%on electrical components use! in circuitr' toda'. The fra%e of reference /ill also sho/ ho/ to create sche%atic and circuit design "sin$ Ki()D and ho/ to pro$ra% a Microchi& %icroprocessor in the C pro$ra%ing lan$"a$e. -
Calqrp Analog Power Meter Assembly Guide John Sutter W1JDS [email protected]
CalQRP Analog Power Meter Assembly Guide John Sutter W1JDS [email protected] Rev 1.1 August 7, 2018 About 3 weeks ago Doug Hendricks, KI6DS, mentioned he had a club project idea. I think he said he had some low cost meters and thought it would be good to spin an old project, the Christmas Power Meter, using the latest/greatest tools of the day which I’m sure will be laughable in another decade. That earlier project by apparently had the same instigator. Like the original by Song Kang, WA3AYQ and Bob Okas, W3CD, this version of the meter has two ranges, 1W and 10W using a SPDT switch to select between them instead of 2 BNC connectors. Beyond that, the schematic is pretty much the same. The tools I used: Schematic Capture KiCAD PCB Layout KiCAD PCB Fabrication AllPCB Enclosure Design OpenSCAD 3D Printer Creality CR-10 1 The Circuit As mentioned earlier the schematic matches the Christmas Power Meter pretty closely. SW1 is used to switch the power from the BNC connector into either the 10W load consisting of four 200 Ω 3 Watt carbon film resistors or the 1W load consisting of two 100 Ω ½ Watt carbon film resistors. The diodes are used as detectors with the resulting voltage filtered by the capacitors. The resistors are used to adjust the full-scale current to 200 μA. More on that later. FIGURE 1 SCHEMATIC A germanium diode was used on the 1 W range due to its lower voltage drop. More on that later. If you decide to use a through hole switch, the maximum shaft diameter is 6.3 mm.