High-Performance DSP Processors for Intelligence Applications
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

12 Questions To... Natami Team - Part 1
12 questions to... Natami Team - part 1 Banter (c) Polski Portal Amigowy (www.ppa.pl) Today I will tell you about something unique. I will present you the latest 68k CPU! You may wonder... What actually is N68050? The N68050 (N050) is a new 68k family processor developed by the Natami Team. It runs inside the FPGA together with the Natami chipset. The 050 is the first revision of our 68k CPU architecture. Further on, we will extend the architecture to the N68050E and later the N68070 specification. The N68050 softcore will be the default CPU of the Natami system. But if the user wants to, he could also get a separate CPU card with a physical 68060 for his Natami system, connected to the mainboard over the SyncZorro bus. The development history of the N68050 core. One could say it started in 1998, when Gunnar tried to write his first 68k softcore. But FPGAs were unfortunately too small to accomplish this task back then. The actual development of the Natami softcore started two years ago, after we dismissed Coldfire as a possible CPU for the Natami. Coldfire was interesting, but our testing and estimates showed us that solving it with our own softcore is even better. The first "N68070" softcore design idea was similar to a crossbreed of 68000 and Coldfire. Our first concept was to use a pipeline similar to the Coldfire V3 pipeline. To improve performance we changed this and reworked the pipeline to be longer. Our goal for the softcore was to reach a higher clockrate and to be in all regards better than the original Motorola 68060 clocked at the same speed. -

Lecture 1: Course Introduction G Course Organization G Historical Overview G Computer Organization G Why the MC68000? G Why Assembly Language?
Lecture 1: Course introduction g Course organization g Historical overview g Computer organization g Why the MC68000? g Why assembly language? Microprocessor-based System Design 1 Ricardo Gutierrez-Osuna Wright State University Course organization g Grading Instructor n Exams Ricardo Gutierrez-Osuna g 1 midterm and 1 final Office: 401 Russ n Homework Tel:775-5120 g 4 problem sets (not graded) [email protected] n Quizzes http://www.cs.wright.edu/~rgutier g Biweekly Office hours: TBA n Laboratories g 5 Labs Teaching Assistant g Grading scheme Mohammed Tabrez Office: 339 Russ [email protected] Weight (%) Office hours: TBA Quizes 20 Laboratory 40 Midterm 20 Final Exam 20 Microprocessor-based System Design 2 Ricardo Gutierrez-Osuna Wright State University Course outline g Module I: Programming (8 lectures) g MC68000 architecture (2) g Assembly language (5) n Instruction and addressing modes (2) n Program control (1) n Subroutines (2) g C language (1) g Module II: Peripherals (9) g Exception processing (1) g Devices (6) n PI/T timer (2) n PI/T parallel port (2) n DUART serial port (1) g Memory and I/O interface (1) g Address decoding (2) Microprocessor-based System Design 3 Ricardo Gutierrez-Osuna Wright State University Brief history of computers GENERATION FEATURES MILESTONES YEAR NOTES Asia Minor, Abacus 3000BC Only replaced by paper and pencil Mech., Blaise Pascal, Pascaline 1642 Decimal addition (8 decimal figs) Early machines Electro- Charles Babbage Differential Engine 1823 Steam powered (3000BC-1945) mech. Herman Hollerith, -
RTEMS CPU Supplement Documentation Release 4.11.3 ©Copyright 2016, RTEMS Project (Built 15Th February 2018)
RTEMS CPU Supplement Documentation Release 4.11.3 ©Copyright 2016, RTEMS Project (built 15th February 2018) CONTENTS I RTEMS CPU Architecture Supplement1 1 Preface 5 2 Port Specific Information7 2.1 CPU Model Dependent Features...........................8 2.1.1 CPU Model Name...............................8 2.1.2 Floating Point Unit..............................8 2.2 Multilibs........................................9 2.3 Calling Conventions.................................. 10 2.3.1 Calling Mechanism.............................. 10 2.3.2 Register Usage................................. 10 2.3.3 Parameter Passing............................... 10 2.3.4 User-Provided Routines............................ 10 2.4 Memory Model..................................... 11 2.4.1 Flat Memory Model.............................. 11 2.5 Interrupt Processing.................................. 12 2.5.1 Vectoring of an Interrupt Handler...................... 12 2.5.2 Interrupt Levels................................ 12 2.5.3 Disabling of Interrupts by RTEMS...................... 12 2.6 Default Fatal Error Processing............................. 14 2.7 Symmetric Multiprocessing.............................. 15 2.8 Thread-Local Storage................................. 16 2.9 CPU counter...................................... 17 2.10 Interrupt Profiling................................... 18 2.11 Board Support Packages................................ 19 2.11.1 System Reset................................. 19 3 ARM Specific Information 21 3.1 CPU Model Dependent Features.......................... -

Procesory Ve Směrovačích Firmy Cisco Motorola MPC857DSL
Procesory ve směrovačích firmy Cisco Pokročilé architektury počítačů Marek Malysz, mal341 Obsah Motorola MPC857DSL.............................................................................................................................1 Motorola 68360.........................................................................................................................................2 Motorola 68030.........................................................................................................................................3 Motorola MPC860 PowerQUICC............................................................................................................3 PMC-Sierra RM7061A.............................................................................................................................4 Broadcom BCM1250................................................................................................................................5 R4600.........................................................................................................................................................5 R5000.........................................................................................................................................................6 R7000.........................................................................................................................................................6 QuantumFlow Processor...........................................................................................................................6 -

Upgrade of Linac Control System with New Vme Controllers at Spring-8
8th International Conference on Accelerator & Large Experimental Physics Control Systems, 2001, San Jose, California WEAT005 physics/0111131 UPGRADE OF LINAC CONTROL SYSTEM WITH NEW VME CONTROLLERS AT SPRING-8 T. Masuda, T. Ohata, T. Asaka, H. Dewa, T. Fukui, H. Hanaki, N. Hosoda, T. Kobayashi, M. Kodera, A. Mizuno, S. Nakajima, S. Suzuki, M. Takao, R. Tanaka, T. Taniuchi, Y. Taniuchi, H. Tomizawa, A. Yamashita, K. Yanagida SPring-8, Hyogo 679-5198, Japan Abstract In September 1999, we started to upgrade the present linac system to the new one by replacing a part of We integrated an injector linac control system to the hardware and introducing a standard software scheme as SPring-8 standard system in September 2000. As a result described in below. At this time, we also introduced the of this integration, the SPring-8 accelerator complex was standard database system for the linac control [3,4]. controlled by one unified system. Because the linac was Because the linac played a role as an injector to the continuously running as the electron beam injector not booster synchrotron and the NewSUBARU storage ring, it only for the SPring-8 storage ring but also for was necessary to avoid downtime due to the integration NewSUBARU, we had to minimize the hardware procedures. We separated the hardware upgrade work into modification to reduce the time for the development and two phases, that is, we replaced the system with minimum testing of the new control system. The integration method modification at the first phase and postponed an overall was almost the same as that of the integration of the replacement to the near future. -

RIP Architecture L Technical Information
L Technical Information RIP Architecture A raster image processor (RIP) is a computer with a very specific task to perform. It translates a series of computer commands into something that an output device can print. For an imagesetter, this means the instructions that instruct the laser to expose certain areas on the film. Acronyms ASIC Application Specific Integrated Circuit RIP architecture refers to the CISC Complex Instruction Set Computer 1An excellent source of design of the RIP, particularly CPU Central Processing Unit information on computer EPROM Erasable Programmable Read-Only technology is The Computer the hardware and software Memory Glossary by Alan Freedman. that make the RIP work. It is I/O Input/Output It is available from The impossible to discuss RIP MHz Megahertz Computer Language architecture without MIPS Million Instructions Per Second Company, (215) 297-5999. mentioning a number of 1 (also the name of a company that computer buzz words , many manufactures CPUs) of which are acronyms (see PROM Programmable Read-Only Memory list to right). And so to begin, RIP Raster Image Processor we’ll start with a review of RISC Reduced Instruction Set Computer computer basics, and see how SPARC Scalable Performance ARChitecture those principles apply to RIPs. TAXI Transparent Asynchronous Xmitter receiver Interface XMO eXtended Memory Option Computer basics The CPU of a computer is where the bulk of the computing gets done. Microprocessor designations The CPU may also be called the Intel Corporation microprocessor if the CPU is built on a • 8080, 8088 single miniaturized electronic circuit (i.e. • 8086, 80286, 80386, 80486 chip). -

Porting the Choices Object-Oriented Operating System to the Motorola 68030
PORTING THE CHOICES OBJECT-ORIENTED OPERATING SYSTEM TO THE MOTOROLA 68030 BY BJORN ANDREW HELGAAS B.A., Augustana College, 1988 THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer Science in the Graduate College of the University of Illinois at Urbana-Champaign, 1991 Urbana, Illinois TABLE OF CONTENTS Chapter 1 Introduction .......................................... 1 2 Choices Overview ....................................... 4 2.1 Processes ........................................ 5 2.2 Exceptions ....................................... 7 2.3 Virtual Memory .................................... 8 3 Process Scheduling ...................................... 10 3.1 Choices Process Scheduling .............................. 12 3.2 The MC68030SystemContext Class .......................... 15 3.3 Summary ........................................ 17 4 Exception Handling ..................................... 19 4.1 Choices Exception Handling .............................. 20 4.2 MC68030 Exception Handling ............................. 23 4.3 The MC68030CPU Class ................................ 25 4.4 Summary ........................................ 31 5 Virtual Memory ....................................... 32 5.1 Choices Virtual Memory ................................ 34 5.2 MC68030 Virtual Memory ............................... 35 5.3 The MC68030Translation Class ............................ 39 5.4 The MC68030MMU Class ............................... 42 5.5 Summary ....................................... -
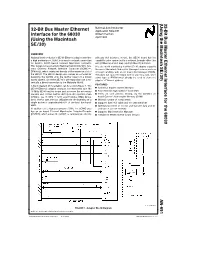
32-Bit Bus Master Ethernet Interface for the 68030
(Using the Macintosh SE/30)32-Bit Bus Master Ethernet Interface for the 68030 AN-691 National Semiconductor 32-Bit Bus Master Ethernet Application Note 691 Interface for the 68030 William Harmon (Using the Macintosh April 1993 SE/30) OVERVIEW National Semiconductor's SE/30 Ethernet adapter provides with any AUI interface. In fact, the SE/30 board has the a high performance, 32-bit, bus master network connection capability to be connected to a network through either thin for Apple's 68030 based compact Macintosh computer. wire (10Base2) or AUI drop cable (10Base5) Ethernet. This design is based around National Semiconductor's Sys- It is also worth mentioning that the SE/30 adapter supports tems Oriented Network Interface Controller (SONICTM, the use of Macintosh Nubus Slot Manager features, such as DP83932), which interfaces directly to the extension slot of interrupt handling, with an on board Slot Manager PROM. the SE/30. The SE/30 design also serves as a model for This does not cause the board to incur any extra cost, since designing the SONIC onto the mother board of a 68030 some type of PROM must already be used to store the based system, since the SE/30's one expansion slot is es- adapter's Ethernet address. sentially a direct connection to the Motorola 68030. FEATURES A block diagram of the adapter can be seen in Figure 1. The SE/30 Ethernet adapter operates synchronously with the Y 32-bit bus master system interface 16 MHz SE/30 mother board and accesses the necessary Y Asynchronous high speed 3 cycle DMA transmit and receive buffers directly in the system's main Y 100% on card address filtering, via the SONIC's on memory, via 16 MHz 3 cycle asynchronous DMA opera- board Content Addressable Memory (CAM) tions. -
Energy Consumption of Apple Macintosh Computers
Energy Consumption of Apple Macintosh Computers Jacob R. Lorch Alan Jay Smith Report No. UCB/CSD-97-961 June 1997 Computer Science Division (EECS) University of California Berkeley, California 94720 Energy Consumption of Apple Macintosh Computers Jacob R. Lorch and Alan Jay Smith Computer Science Division, EECS Department, University of California, Berkeley Berkeley, CA 94720-1776 June 17, 1997 Abstract easily visible without a backlight, a low-power proces- sor, a low-power disk, ¯ash memory instead of mechan- The utility of a portable computer is critically depen- ical disk, etc. Second, one can take better advantage dent on the period it can be used while running off the of the low-power states of existing system components. battery. In this paper, we present a study of power con- For example, most hard drives made for portable com- sumption in Apple Macintosh computers. We measure puters can be made to stop spinning in order to save the existing power consumption for each system com- power, and operating systems can take advantage of ponent using built-in measuring tools. Since total power this by spinning down the hard drive when it is not in consumption is a function of user workload, we use eight use [17]. Another low-power state that can be taken ad- user workload traces to determine power use as observed vantage of is running the CPU at a lower voltage. Power in practice. Apple currently implements some power- consumption drops with the square of the voltage, but saving features, and the effectiveness of those features the maximum clock rate also drops with the voltage. -
ACCELERATOR CARD User's Guide
ACCELERATOR CARD User’s Guide Copyright © 1989 by Commodore Amiga, Inc. All Rights Reserved. This document may not, in whole or in part, be copied, photocopied, reproduced, translated, or reduced to any electronic medium or machine readable form, without prior consent, in writing, from Commodore-Amiga, Inc. With this document, Commodore makes no warranties or guarantees, either express or implied, with respect to the products described, their functionality, compatibility, or avail- ability. Further, Commodore assumes no responsibility or liability for statements or repre- sentations made by itself or by third party vendors or in the publications reproduced herein. IN NO EVENT WILL COMMODORE BE LIABLE FOR DIRECT, INDIRECT, INCIDENTAL, OR CONSEQUENTIAL DAMAGES RESULTING FROM ANY CLAIM ARISING OUT OF THE REPRESENTATIONS MADE HEREIN, EVEN IF IT HAS BEEN ADVISED OF THE POSSIBILITIES OF SUCH DAMAGES. SOME STATES DO NOT ALLOW THE EXCLU- SION OR LIMITATION OF SUCH WARRANTIES OR DAMAGES, SO THE. ABOVE EX- CLUSIONS OR LIMITATIONS MAY NOT APPLY. Information in this document is subject to change without notice and does not represent a commitment on the part of Commodore. Commodore and the Commodore logo are regis- tered trademarks or Commodore Electronics Ltd. Amiga is a registered trademark of Commodore-Amiga, Inc. Motorola is a registered trademark of Motorola, Inc. UNIX is a registered trademark of AT&T. F.C.C. ID BR98YVA2630 User’s Manual Statement WARNING: This equipment has been certified to comply with the limits for a Class B computing device, pursuant to subpart J of Part 15 of the Federal Communications Commis- sions rules. It also complies with Standard C108.8-M1983 of the Canadian Standards Association’s regulations. -

Μ MOTOROLA for More Information on This Product, Rev
Freescale Semiconductor, Inc. Order this document MOTOROLA by MC68EC030/D SEMICONDUCTOR TECHNICAL DATA MC68EC030 Technical Summary Second-Generation 32-Bit Enhanced Embedded Controller The MC68EC030 is a 32-bit embedded controller that streamlines the functionality of an MC68030 for the requirements of embedded control applications. The MC68EC030 is optimized to maintain performance while using cost-effective memory subsystems. The rich instruction set and addressing . mode capabilities of the MC68020, MC68030, and MC68040 have been maintained, allowing a clear . migration path for M68000 systems. The main features of the MC68EC030 are as follows: c n I • Object-Code Compatible with the MC68020, MC68030, and Earlier M68000 Microprocessors , • Burst-Mode Bus Interface for Efficient DRAM Access r • On-Chip Data Cache (256 Bytes) and On-Chip Instruction Cache (256 Byte) o • Dynamic Bus Sizing for Direct Interface to 8-, 16-, and 32-Bit Devices t • 25- and 40-MHz Operating Frequency (up to 9.2 MIPS) c • Advanced Plastic Pin Grid Array Packaging for Through-Hole Applications u d Additional features of the MC68EC030 include: n o • Complete 32-Bit Nonmultiplexed Address and Data Buses c i • Sixteen 32-Bit General-Purpose Data and Address Registers • Two 32-Bit Supervisor Stack Pointers and Eight Special-Purpose Control Registers m • Two Access Control Registers Allow Blocks To Be Defined for Cacheability Protection e • Pipelined Architecture with Increased Parallelism Allows: S – Internal Caches Accesses in Parallel with Bus Transfers – Overlapped -
Agilent Test & Measurement Discontinued Products
Agilent Test & Measurement Discontinued Products Technical Support Status (last updated May 1, 2004) The following list contains Agilent Technologies products that are no longer sold and do not have specific information on the Agilent web site. The list provides the following information: • Model number • Brief Product description • Replacement information. If replacement information is available,it's listed here. You will typically find information on replacement products by searching for the listed model number on the Agilent Test & Measurements website at www.agilent.com/find/t&m. Some replacement listings on this page are jumpstations that will take you directly to the replacement family. • Technical support status as of May 1, 2004. "Currently supported" means that, if your instrument is under warranty, or if you have a valid support contract with Agilent, you can receive technical product support and service through the Agilent support network. "No longer supported" means that that the Agilent website is the sole source of application support for this product. For many older products, "no longer supported" may mean no further information is available. You can find information on many recently discontinued products on the Agilent website at www.agilent.com/find/discontinued. Product Description Support Status Replacement Information as of 1 May 83A PERSONAL COMPUTE No2004 longer supported no replacement 83F HP83+GPIB IO SYS No longer supported no replacement 85A BASIC PROGRAMMAB No longer supported no replacement 85B PERS COMPUTER