Stereographic Projection and the Mercator Map 1
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Mathematics of Fels Sculptures
THE MATHEMATICS OF FELS SCULPTURES DAVID FELS AND ANGELO B. MINGARELLI Abstract. We give a purely mathematical interpretation and construction of sculptures rendered by one of the authors, known herein as Fels sculptures. We also show that the mathematical framework underlying Ferguson's sculpture, The Ariadne Torus, may be considered a special case of the more general constructions presented here. More general discussions are also presented about the creation of such sculptures whether they be virtual or in higher dimensional space. Introduction Sculptors manifest ideas as material objects. We use a system wherein an idea is symbolized as a solid, governed by a set of rules, such that the sculpture is the expressed material result of applying rules to symbols. The underlying set of rules, being mathematical in nature, may thus lead to enormous abstraction and although sculptures are generally thought of as three dimensional objects, they can be created in four and higher dimensional (unseen) spaces with various projections leading to new and pleasant three dimensional sculptures. The interplay of mathematics and the arts has, of course, a very long and old history and we cannot begin to elaborate on this matter here. Recently however, the problem of creating mathematical programs for the construction of ribbed sculptures by Charles Perry was considered in [3]. For an insightful paper on topological tori leading to abstract art see also [5]. Spiral and twirling sculptures were analysed and constructed in [1]. This paper deals with a technique for sculpting works mostly based on wood (but not necessarily restricted to it) using abstract ideas based on twirls and tori, though again, not limited to them. -

Sculptures in S3
Sculptures in S3 Saul Schleimer and Henry Segerman∗ Abstract We describe the construction of a number of sculptures. Each is based on a geometric design native to the three- sphere: the unit sphere in four-dimensional space. Via stereographic projection, we transfer the design to three- dimensional space. All of the sculptures are then fabricated by the 3D printing service Shapeways. 1 Introduction The three-sphere, denoted S3, is a three-dimensional analog of the ordinary two-dimensional sphere, S2. In n+ general, the n–dimensional sphere is a subset of R 1 as follows: n n+1 2 2 2 S = f(x0;x1;:::;xn) 2 R j x0 + x1 + ··· + xn = 1g: Thus S2 can be seen as the usual unit sphere in R3. Visualising objects in dimensions higher than three is non-trivial. However for S3 we can use stereographic projection to reduce the dimension from four to three. n n n Let N = (0;:::;0;1) be the north pole of S . We define stereographic projection r : S − fNg ! R by x0 x1 xn−1 r(x0;x1;:::;xn) = ; ;:::; : 1 − xn 1 − xn 1 − xn See [1, page 27]. Figure 1a displays the one-dimensional case; this is also a cross-section of the n– dimensional case. For any point (x;y) 2 S1 − fNg draw the straight line L between N and (x;y). Then L meets R1 at a single point; this is r(x;y). N x 1−y (x;y) (a) Stereographic projection from S1 − (b) Two-dimensional stereographic projection applied to the Earth. -

The Mathematics of Mitering and Its Artful Application
The Mathematics of Mitering and Its Artful Application Tom Verhoeff Koos Verhoeff Faculty of Mathematics and CS Valkenswaard, Netherlands Eindhoven University of Technology Den Dolech 2 5612 AZ Eindhoven, Netherlands Email: [email protected] Abstract We give a systematic presentation of the mathematics behind the classic miter joint and variants, like the skew miter joint and the (skew) fold joint. The latter is especially useful for connecting strips at an angle. We also address the problems that arise from constructing a closed 3D path from beams by using miter joints all the way round. We illustrate the possibilities with artwork making use of various miter joints. 1 Introduction The miter joint is well-known in the Arts, if only as a way of making fine frames for pictures and paintings. In its everyday application, a common problem with miter joints occurs when cutting a baseboard for walls meeting at an angle other than exactly 90 degrees. However, there is much more to the miter joint than meets the eye. In this paper, we will explore variations and related mathematical challenges, and show some artwork that this provoked. In Section 2 we introduce the problem domain and its terminology. A systematic mathematical treatment is presented in Section 3. Section 4 shows some artwork based on various miter joints. We conclude the paper in Section 5 with some pointers to further work. 2 Problem Domain and Terminology We will now describe how we encountered new problems related to the miter joint. To avoid misunderstand- ings, we first introduce some terminology. Figure 1: Polygon knot with six edges (left) and thickened with circular cylinders (right) 225 2.1 Cylinders, single and double beveling, planar and spatial mitering Let K be a one-dimensional curve in space, having finite length. -
Polar Zenithal Map Projections
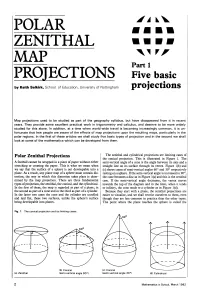
POLAR ZENITHAL MAP Part 1 PROJECTIONS Five basic by Keith Selkirk, School of Education, University of Nottingham projections Map projections used to be studied as part of the geography syllabus, but have disappeared from it in recent years. They provide some excellent practical work in trigonometry and calculus, and deserve to be more widely studied for this alone. In addition, at a time when world-wide travel is becoming increasingly common, it is un- fortunate that few people are aware of the effects of map projections upon the resulting maps, particularly in the polar regions. In the first of these articles we shall study five basic types of projection and in the second we shall look at some of the mathematics which can be developed from them. Polar Zenithal Projections The zenithal and cylindrical projections are limiting cases of the conical projection. This is illustrated in Figure 1. The A football cannot be wrapped in a piece of paper without either semi-vertical angle of a cone is the angle between its axis and a stretching or creasing the paper. This is what we mean when straight line on its surface through its vertex. Figure l(b) and we say that the surface of a sphere is not developable into a (c) shows cones of semi-vertical angles 600 and 300 respectively plane. As a result, any plane map of a sphere must contain dis- resting on a sphere. If the semi-vertical angle is increased to 900, tortion; the way in which this distortion takes place is deter- the cone becomes a disc as in Figure l(a) and this is the zenithal mined by the map projection. -

Cross-Section- Surface Area of a Prism- Surface Area of a Cylinder- Volume of a Prism
S8.6 Volume Things to Learn (Key words, Notation & Formulae) Complete from your notes Radius- Diameter- Surface Area- Volume- Capacity- Prism- Cross-section- Surface area of a prism- Surface area of a cylinder- Volume of a prism- Section 1. Surface area of cuboids: Q1. Work out the surface area of each cuboid shown below: Q2. What is the surface area of a cuboid with the dimensions 4cm, 5cm and 6cm? Section 2. Volume of cuboids: Q1. Calculate the volume of these cuboids: S8.6 Volume Q2. Section 3. Definition of prisms: Label all the shapes and tick the ones that are prisms. Section 4. Surface area of prisms: Q1. Find the surface area of this triangular prism. Q2. Calculate the surface area of this cylinder. S8.6 Volume Q3. Cans are in cylindrical shapes. Each can has a diameter of 5.3 cm and a height of 11.4 cm. How much paper is required to make the label for the 20 cans? Section 5. Volume of a prism: Q1. Find the volume of this L-shaped prism. Q2. Calculate the volume of this prism. Give your answer to 2sf Section 6 . Volume of a cylinder: Q1. Calculate the volume of this cylinder. S8.6 Volume Q2. The diagram shows a piece of wood. The piece of wood is a prism of length 350cm. The cross-section of the prism is a semi-circle with diameter 1.2cm. Calculate the volume of the piece of wood. Give your answer to 3sf. Section 7. Problems involving volume and capacity: Q1. Sam buys a planter shown below. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -

Map Projections
Map Projections Chapter 4 Map Projections What is map projection? Why are map projections drawn? What are the different types of projections? Which projection is most suitably used for which area? In this chapter, we will seek the answers of such essential questions. MAP PROJECTION Map projection is the method of transferring the graticule of latitude and longitude on a plane surface. It can also be defined as the transformation of spherical network of parallels and meridians on a plane surface. As you know that, the earth on which we live in is not flat. It is geoid in shape like a sphere. A globe is the best model of the earth. Due to this property of the globe, the shape and sizes of the continents and oceans are accurately shown on it. It also shows the directions and distances very accurately. The globe is divided into various segments by the lines of latitude and longitude. The horizontal lines represent the parallels of latitude and the vertical lines represent the meridians of the longitude. The network of parallels and meridians is called graticule. This network facilitates drawing of maps. Drawing of the graticule on a flat surface is called projection. But a globe has many limitations. It is expensive. It can neither be carried everywhere easily nor can a minor detail be shown on it. Besides, on the globe the meridians are semi-circles and the parallels 35 are circles. When they are transferred on a plane surface, they become intersecting straight lines or curved lines. 2021-22 Practical Work in Geography NEED FOR MAP PROJECTION The need for a map projection mainly arises to have a detailed study of a 36 region, which is not possible to do from a globe. -
Changes in Cross-Section Geometry and Channel Volume in Two Reaches of the Kankakee River in Illinois, 1959-94
Changes in Cross-Section Geometry and Channel Volume in Two Reaches of the Kankakee River in Illinois, 1959-94 By PAUL J. TERRIO and JOHN E. NAZIMEK U.S. GEOLOGICAL SURVEY Water-Resources Investigations Report 96 4261 Prepared in cooperation with the KANKAKEE COUNTY SOIL AND WATER CONSERVATION DISTRICT Urbana, Illinois 1997 U.S. DEPARTMENT OF THE INTERIOR BRUCE BABBITT, Secretary U.S. GEOLOGICAL SURVEY Gordon P. Eaton, Director The use of firm, trade, and brand names in this report is for identification purposes only and does not constitute endorsement by the U.S. Geological Survey. For additional information write to: Copies of this report can be purchased from: District Chief U.S. Geological Survey U.S. Geological Survey Branch of Information Services 221 N. Broadway Box 25286 Urbana, Illinois 61801 Denver, CO 80225 CONTENTS Abstract......................................................................................... 1 Introduction...................................................................................... 1 Purpose and Scope............................................................................ 3 Description of the Study Area................................................................... 4 Acknowledgments............................................................................ 4 Compilation and Measurement of Channel Cross-Section Geometry Data ..................................... 6 Momence Wetlands Reach ..................................................................... 6 Six-Mile Pool Reach ......................................................................... -
Maps and Cartography: Map Projections a Tutorial Created by the GIS Research & Map Collection
Maps and Cartography: Map Projections A Tutorial Created by the GIS Research & Map Collection Ball State University Libraries A destination for research, learning, and friends What is a map projection? Map makers attempt to transfer the earth—a round, spherical globe—to flat paper. Map projections are the different techniques used by cartographers for presenting a round globe on a flat surface. Angles, areas, directions, shapes, and distances can become distorted when transformed from a curved surface to a plane. Different projections have been designed where the distortion in one property is minimized, while other properties become more distorted. So map projections are chosen based on the purposes of the map. Keywords •azimuthal: projections with the property that all directions (azimuths) from a central point are accurate •conformal: projections where angles and small areas’ shapes are preserved accurately •equal area: projections where area is accurate •equidistant: projections where distance from a standard point or line is preserved; true to scale in all directions •oblique: slanting, not perpendicular or straight •rhumb lines: lines shown on a map as crossing all meridians at the same angle; paths of constant bearing •tangent: touching at a single point in relation to a curve or surface •transverse: at right angles to the earth’s axis Models of Map Projections There are two models for creating different map projections: projections by presentation of a metric property and projections created from different surfaces. • Projections by presentation of a metric property would include equidistant, conformal, gnomonic, equal area, and compromise projections. These projections account for area, shape, direction, bearing, distance, and scale. -
Representations of Celestial Coordinates in FITS
A&A 395, 1077–1122 (2002) Astronomy DOI: 10.1051/0004-6361:20021327 & c ESO 2002 Astrophysics Representations of celestial coordinates in FITS M. R. Calabretta1 and E. W. Greisen2 1 Australia Telescope National Facility, PO Box 76, Epping, NSW 1710, Australia 2 National Radio Astronomy Observatory, PO Box O, Socorro, NM 87801-0387, USA Received 24 July 2002 / Accepted 9 September 2002 Abstract. In Paper I, Greisen & Calabretta (2002) describe a generalized method for assigning physical coordinates to FITS image pixels. This paper implements this method for all spherical map projections likely to be of interest in astronomy. The new methods encompass existing informal FITS spherical coordinate conventions and translations from them are described. Detailed examples of header interpretation and construction are given. Key words. methods: data analysis – techniques: image processing – astronomical data bases: miscellaneous – astrometry 1. Introduction PIXEL p COORDINATES j This paper is the second in a series which establishes conven- linear transformation: CRPIXja r j tions by which world coordinates may be associated with FITS translation, rotation, PCi_ja mij (Hanisch et al. 2001) image, random groups, and table data. skewness, scale CDELTia si Paper I (Greisen & Calabretta 2002) lays the groundwork by developing general constructs and related FITS header key- PROJECTION PLANE x words and the rules for their usage in recording coordinate in- COORDINATES ( ,y) formation. In Paper III, Greisen et al. (2002) apply these meth- spherical CTYPEia (φ0,θ0) ods to spectral coordinates. Paper IV (Calabretta et al. 2002) projection PVi_ma Table 13 extends the formalism to deal with general distortions of the co- ordinate grid. -

Distortion-Free Wide-Angle Portraits on Camera Phones
Distortion-Free Wide-Angle Portraits on Camera Phones YICHANG SHIH, WEI-SHENG LAI, and CHIA-KAI LIANG, Google (a) A wide-angle photo with distortions on subjects’ faces. (b) Distortion-free photo by our method. Fig. 1. (a) A group selfie taken by a wide-angle 97° field-of-view phone camera. The perspective projection renders unnatural look to faces on the periphery: they are stretched, twisted, and squished. (b) Our algorithm restores all the distorted face shapes and keeps the background unaffected. Photographers take wide-angle shots to enjoy expanding views, group por- ACM Reference Format: traits that never miss anyone, or composite subjects with spectacular scenery background. In spite of the rapid proliferation of wide-angle cameras on YiChang Shih, Wei-Sheng Lai, and Chia-Kai Liang. 2019. Distortion-Free mobile phones, a wider field-of-view (FOV) introduces a stronger perspec- Wide-Angle Portraits on Camera Phones. ACM Trans. Graph. 38, 4, Article 61 tive distortion. Most notably, faces are stretched, squished, and skewed, to (July 2019), 12 pages. https://doi.org/10.1145/3306346.3322948 look vastly different from real-life. Correcting such distortions requires pro- fessional editing skills, as trivial manipulations can introduce other kinds of distortions. This paper introduces a new algorithm to undistort faces 1 INTRODUCTION without affecting other parts of the photo. Given a portrait as an input,we formulate an optimization problem to create a content-aware warping mesh Empowered with extra peripheral vi- FOV=97° which locally adapts to the stereographic projection on facial regions, and sion to “see”, a wide-angle lens is FOV=76° seamlessly evolves to the perspective projection over the background. -

STEREOGRAPHIC PROJECTION IS CONFORMAL Let S2
STEREOGRAPHIC PROJECTION IS CONFORMAL Let S2 = {(x,y,z) ∈ R3 : x2 + y2 + z2 =1} be the unit sphere, and let n denote the north pole (0, 0, 1). Identify the complex plane C with the (x, y)-plane in R3. The stereographic projection map, π : S2 − n −→ C, is described as follows: place a light source at the north pole n. For any point p ∈ S2 − n, consider a light ray emanating downward from n to pass through the sphere at p. The ray also meets the plane, and the point where it hits is π(p). That is, π(p)= ℓ(n,p) ∩ R2, where ℓ(n,p)= {(1 − t)n + tp : t ∈ R} is the line through n and p. (See figure 1.) Figure 1. Stereographic projection The formula for stereographic projection is x + iy π(x,y,z)= . 1 − z Indeed, the point (1 − t)n + t(x,y,z) has last coordinate 1 − t + tz. This equals 0 for t = 1/(1 − z), making the other coordinates x/(1 − z) and y/(1 − z), and the formula follows. For the inverse map, take a point q = (x, y, 0) in the plane. Since n and q are orthogonal, any point p = (1 − t)n + tq on the line ℓ(n, q) satisfies |p|2 = (1 − t)2 + t2|q|2. This equals 1 for t =2/(|q|2 + 1) (ignoring t = 0, which gives the north pole), showing that 2 2 − 2x 2y x + y − 1 π 1(x, y)= , , . x2 + y2 +1 x2 + y2 +1 x2 + y2 +1 1 2 STEREOGRAPHIC PROJECTION IS CONFORMAL Stereographic projection is conformal, meaning that it preserves angles between 2 curves.