Mapping the Sphere
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Chapter 11. Three Dimensional Analytic Geometry and Vectors
Chapter 11. Three dimensional analytic geometry and vectors. Section 11.5 Quadric surfaces. Curves in R2 : x2 y2 ellipse + =1 a2 b2 x2 y2 hyperbola − =1 a2 b2 parabola y = ax2 or x = by2 A quadric surface is the graph of a second degree equation in three variables. The most general such equation is Ax2 + By2 + Cz2 + Dxy + Exz + F yz + Gx + Hy + Iz + J =0, where A, B, C, ..., J are constants. By translation and rotation the equation can be brought into one of two standard forms Ax2 + By2 + Cz2 + J =0 or Ax2 + By2 + Iz =0 In order to sketch the graph of a quadric surface, it is useful to determine the curves of intersection of the surface with planes parallel to the coordinate planes. These curves are called traces of the surface. Ellipsoids The quadric surface with equation x2 y2 z2 + + =1 a2 b2 c2 is called an ellipsoid because all of its traces are ellipses. 2 1 x y 3 2 1 z ±1 ±2 ±3 ±1 ±2 The six intercepts of the ellipsoid are (±a, 0, 0), (0, ±b, 0), and (0, 0, ±c) and the ellipsoid lies in the box |x| ≤ a, |y| ≤ b, |z| ≤ c Since the ellipsoid involves only even powers of x, y, and z, the ellipsoid is symmetric with respect to each coordinate plane. Example 1. Find the traces of the surface 4x2 +9y2 + 36z2 = 36 1 in the planes x = k, y = k, and z = k. Identify the surface and sketch it. Hyperboloids Hyperboloid of one sheet. The quadric surface with equations x2 y2 z2 1. -

Geographic Board Games
GSR_3 Geospatial Science Research 3. School of Mathematical and Geospatial Science, RMIT University December 2014 Geographic Board Games Brian Quinn and William Cartwright School of Mathematical and Geospatial Sciences RMIT University, Australia Email: [email protected] Abstract Geographic Board Games feature maps. As board games developed during the Early Modern Period, 1450 to 1750/1850, the maps that were utilised reflected the contemporary knowledge of the Earth and the cartography and surveying technologies at their time of manufacture and sale. As ephemera of family life, many board games have not survived, but those that do reveal an entertaining way of learning about the geography, exploration and politics of the world. This paper provides an introduction to four Early Modern Period geographical board games and analyses how changes through time reflect the ebb and flow of national and imperial ambitions. The portrayal of Australia in three of the games is examined. Keywords: maps, board games, Early Modern Period, Australia Introduction In this selection of geographic board games, maps are paramount. The games themselves tend to feature a throw of the dice and moves on a set path. Obstacles and hazards often affect how quickly a player gets to the finish and in a competitive situation whether one wins, or not. The board games examined in this paper were made and played in the Early Modern Period which according to Stearns (2012) dates from 1450 to 1750/18501. In this period printing gradually improved and books and journals became more available, at least to the well-off. Science developed using experimental techniques and real world observation; relying less on classical authority. -
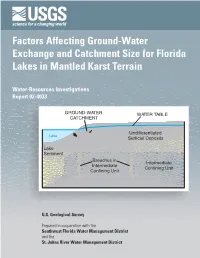
Factors Affecting Ground-Water Exchange and Catchment Size for Florida Lakes in Mantled Karst Terrain
Factors Affecting Ground-Water Exchange and Catchment Size for Florida Lakes in Mantled Karst Terrain Water-Resources Investigations Report 02-4033 GROUND-WATER WATER TABLE CATCHMENT Undifferentiated Lake Surficial Deposits Lake Sediment Breaches in Intermediate Intermediate Confining Unit Confining Unit U.S. Geological Survey Prepared in cooperation with the Southwest Florida Water Management District and the St. Johns River Water Management District Factors Affecting Ground-Water Exchange and Catchment Size for Florida Lakes in Mantled Karst Terrain By T.M. Lee U.S. GEOLOGICAL SURVEY Water-Resources Investigations Report 02-4033 Prepared in cooperation with the SOUTHWEST FLORIDA WATER MANAGEMENT DISTRICT and the ST. JOHNS RIVER WATER MANAGEMENT DISTRICT Tallahassee, Florida 2002 U.S. DEPARTMENT OF THE INTERIOR GALE A. NORTON, Secretary U.S. GEOLOGICAL SURVEY CHARLES G. GROAT, Director The use of firm, trade, and brand names in this report is for identification purposes only and does not constitute endorsement by the U.S. Geological Survey. For additional information Copies of this report can be write to: purchased from: District Chief U.S. Geological Survey U.S. Geological Survey Branch of Information Services Suite 3015 Box 25286 227 N. Bronough Street Denver, CO 80225-0286 Tallahassee, FL 32301 888-ASK-USGS Additional information about water resources in Florida is available on the World Wide Web at http://fl.water.usgs.gov CONTENTS Abstract................................................................................................................................................................................. -

Projective Geometry: a Short Introduction
Projective Geometry: A Short Introduction Lecture Notes Edmond Boyer Master MOSIG Introduction to Projective Geometry Contents 1 Introduction 2 1.1 Objective . .2 1.2 Historical Background . .3 1.3 Bibliography . .4 2 Projective Spaces 5 2.1 Definitions . .5 2.2 Properties . .8 2.3 The hyperplane at infinity . 12 3 The projective line 13 3.1 Introduction . 13 3.2 Projective transformation of P1 ................... 14 3.3 The cross-ratio . 14 4 The projective plane 17 4.1 Points and lines . 17 4.2 Line at infinity . 18 4.3 Homographies . 19 4.4 Conics . 20 4.5 Affine transformations . 22 4.6 Euclidean transformations . 22 4.7 Particular transformations . 24 4.8 Transformation hierarchy . 25 Grenoble Universities 1 Master MOSIG Introduction to Projective Geometry Chapter 1 Introduction 1.1 Objective The objective of this course is to give basic notions and intuitions on projective geometry. The interest of projective geometry arises in several visual comput- ing domains, in particular computer vision modelling and computer graphics. It provides a mathematical formalism to describe the geometry of cameras and the associated transformations, hence enabling the design of computational ap- proaches that manipulates 2D projections of 3D objects. In that respect, a fundamental aspect is the fact that objects at infinity can be represented and manipulated with projective geometry and this in contrast to the Euclidean geometry. This allows perspective deformations to be represented as projective transformations. Figure 1.1: Example of perspective deformation or 2D projective transforma- tion. Another argument is that Euclidean geometry is sometimes difficult to use in algorithms, with particular cases arising from non-generic situations (e.g. -

Automatic Estimation of Sphere Centers from Images of Calibrated Cameras
Automatic Estimation of Sphere Centers from Images of Calibrated Cameras Levente Hajder 1 , Tekla Toth´ 1 and Zoltan´ Pusztai 1 1Department of Algorithms and Their Applications, Eotv¨ os¨ Lorand´ University, Pazm´ any´ Peter´ stny. 1/C, Budapest, Hungary, H-1117 fhajder,tekla.toth,[email protected] Keywords: Ellipse Detection, Spatial Estimation, Calibrated Camera, 3D Computer Vision Abstract: Calibration of devices with different modalities is a key problem in robotic vision. Regular spatial objects, such as planes, are frequently used for this task. This paper deals with the automatic detection of ellipses in camera images, as well as to estimate the 3D position of the spheres corresponding to the detected 2D ellipses. We propose two novel methods to (i) detect an ellipse in camera images and (ii) estimate the spatial location of the corresponding sphere if its size is known. The algorithms are tested both quantitatively and qualitatively. They are applied for calibrating the sensor system of autonomous cars equipped with digital cameras, depth sensors and LiDAR devices. 1 INTRODUCTION putation and memory costs. Probabilistic Hough Transform (PHT) is a variant of the classical HT: it Ellipse fitting in images has been a long researched randomly selects a small subset of the edge points problem in computer vision for many decades (Prof- which is used as input for HT (Kiryati et al., 1991). fitt, 1982). Ellipses can be used for camera calibra- The 5D parameter space can be divided into two tion (Ji and Hu, 2001; Heikkila, 2000), estimating the pieces. First, the ellipse center is estimated, then the position of parts in an assembly system (Shin et al., remaining three parameters are found in the second 2011) or for defect detection in printed circuit boards stage (Yuen et al., 1989; Tsuji and Matsumoto, 1978). -

Holley GM LS Race Single-Plane Intake Manifold Kits
Holley GM LS Race Single-Plane Intake Manifold Kits 300-255 / 300-255BK LS1/2/6 Port-EFI - w/ Fuel Rails 4150 Flange 300-256 / 300-256BK LS1/2/6 Carbureted/TB EFI 4150 Flange 300-290 / 300-290BK LS3/L92 Port-EFI - w/ Fuel Rails 4150 Flange 300-291 / 300-291BK LS3/L92 Carbureted/TB EFI 4150 Flange 300-294 / 300-294BK LS1/2/6 Port-EFI - w/ Fuel Rails 4500 Flange 300-295 / 300-295BK LS1/2/6 Carbureted/TB EFI 4500 Flange IMPORTANT: Before installation, please read these instructions completely. APPLICATIONS: The Holley LS Race single-plane intake manifolds are designed for GM LS Gen III and IV engines, utilized in numerous performance applications, and are intended for carbureted, throttle body EFI, or direct-port EFI setups. The LS Race single-plane intake manifolds are designed for hi-performance/racing engine applications, 5.3 to 6.2+ liter displacement, and maximum engine speeds of 6000-7000 rpm, depending on the engine combination. This single-plane design provides optimal performance across the RPM spectrum while providing maximum performance up to 7000 rpm. These intake manifolds are for use on non-emissions controlled applications only, and will not accept stock components and hardware. Port EFI versions may not be compatible with all throttle body linkages. When installing the throttle body, make certain there is a minimum of ¼” clearance between all linkage and the fuel rail. SPLIT DESIGN: The Holley LS Race manifold incorporates a split feature, which allows disassembly of the intake for direct access to internal plenum and port surfaces, making custom porting and matching a snap. -

Exploding the Ellipse Arnold Good
Exploding the Ellipse Arnold Good Mathematics Teacher, March 1999, Volume 92, Number 3, pp. 186–188 Mathematics Teacher is a publication of the National Council of Teachers of Mathematics (NCTM). More than 200 books, videos, software, posters, and research reports are available through NCTM’S publication program. Individual members receive a 20% reduction off the list price. For more information on membership in the NCTM, please call or write: NCTM Headquarters Office 1906 Association Drive Reston, Virginia 20191-9988 Phone: (703) 620-9840 Fax: (703) 476-2970 Internet: http://www.nctm.org E-mail: [email protected] Article reprinted with permission from Mathematics Teacher, copyright May 1991 by the National Council of Teachers of Mathematics. All rights reserved. Arnold Good, Framingham State College, Framingham, MA 01701, is experimenting with a new approach to teaching second-year calculus that stresses sequences and series over integration techniques. eaders are advised to proceed with caution. Those with a weak heart may wish to consult a physician first. What we are about to do is explode an ellipse. This Rrisky business is not often undertaken by the professional mathematician, whose polytechnic endeavors are usually limited to encounters with administrators. Ellipses of the standard form of x2 y2 1 5 1, a2 b2 where a > b, are not suitable for exploding because they just move out of view as they explode. Hence, before the ellipse explodes, we must secure it in the neighborhood of the origin by translating the left vertex to the origin and anchoring the left focus to a point on the x-axis. -

Water Flow in the Silurian-Devonian Aquifer System, Johnson County, Iowa
Hydrogeology and Simulation of Ground- Water Flow in the Silurian-Devonian Aquifer System, Johnson County, Iowa By Patrick Tucci (U.S. Geological Survey) and Robert M. McKay (Iowa Department of Natural Resources, Iowa Geological Survey) Prepared in cooperation with The Iowa Department of Natural Resources – Water Supply Bureau City of Iowa City Johnson County Board of Supervisors City of Coralville The University of Iowa City of North Liberty City of Solon Scientific Investigations Report 2005–5266 U.S. Department of the Interior U.S. Geological Survey U.S. Department of the Interior Gale A. Norton, Secretary U.S. Geological Survey P. Patrick Leahy, Acting Director U.S. Geological Survey, Reston, Virginia: 2006 For product and ordering information: World Wide Web: http://www.usgs.gov/pubprod Telephone: 1-888-ASK-USGS For more information on the USGS--the Federal source for science about the Earth, its natural and living resources, natural hazards, and the environment: World Wide Web: http://www.usgs.gov Telephone: 1-888-ASK-USGS Any use of trade, product, or firm names is for descriptive purposes only and does not imply endorsement by the U.S. Government. Although this report is in the public domain, permission must be secured from the individual copyright owners to reproduce any copyrighted materials contained within this report. Suggested citation: Tucci, Patrick and McKay, Robert, 2006, Hydrogeology and simulation of ground-water flow in the Silurian-Devonian aquifer system, Johnson County, Iowa: U.S. Geological Survey, Scientific Investigations -

Algebraic Study of the Apollonius Circle of Three Ellipses
EWCG 2005, Eindhoven, March 9–11, 2005 Algebraic Study of the Apollonius Circle of Three Ellipses Ioannis Z. Emiris∗ George M. Tzoumas∗ Abstract methods readily extend to arbitrary inputs. The algorithms for the Apollonius diagram of el- We study the external tritangent Apollonius (or lipses typically use the following 2 main predicates. Voronoi) circle to three ellipses. This problem arises Further predicates are examined in [4]. when one wishes to compute the Apollonius (or (1) given two ellipses and a point outside of both, Voronoi) diagram of a set of ellipses, but is also of decide which is the ellipse closest to the point, independent interest in enumerative geometry. This under the Euclidean metric paper is restricted to non-intersecting ellipses, but the extension to arbitrary ellipses is possible. (2) given 4 ellipses, decide the relative position of the We propose an efficient representation of the dis- fourth one with respect to the external tritangent tance between a point and an ellipse by considering a Apollonius circle of the first three parametric circle tangent to an ellipse. The distance For predicate (1) we consider a circle, centered at the of its center to the ellipse is expressed by requiring point, with unknown radius, which corresponds to the that their characteristic polynomial have at least one distance to be compared. A tangency point between multiple real root. We study the complexity of the the circle and the ellipse exists iff the discriminant tritangent Apollonius circle problem, using the above of the corresponding pencil’s determinant vanishes. representation for the distance, as well as sparse (or Hence we arrive at a method using algebraic numbers toric) elimination. -

The History of Cartography, Volume 3
THE HISTORY OF CARTOGRAPHY VOLUME THREE Volume Three Editorial Advisors Denis E. Cosgrove Richard Helgerson Catherine Delano-Smith Christian Jacob Felipe Fernández-Armesto Richard L. Kagan Paula Findlen Martin Kemp Patrick Gautier Dalché Chandra Mukerji Anthony Grafton Günter Schilder Stephen Greenblatt Sarah Tyacke Glyndwr Williams The History of Cartography J. B. Harley and David Woodward, Founding Editors 1 Cartography in Prehistoric, Ancient, and Medieval Europe and the Mediterranean 2.1 Cartography in the Traditional Islamic and South Asian Societies 2.2 Cartography in the Traditional East and Southeast Asian Societies 2.3 Cartography in the Traditional African, American, Arctic, Australian, and Pacific Societies 3 Cartography in the European Renaissance 4 Cartography in the European Enlightenment 5 Cartography in the Nineteenth Century 6 Cartography in the Twentieth Century THE HISTORY OF CARTOGRAPHY VOLUME THREE Cartography in the European Renaissance PART 1 Edited by DAVID WOODWARD THE UNIVERSITY OF CHICAGO PRESS • CHICAGO & LONDON David Woodward was the Arthur H. Robinson Professor Emeritus of Geography at the University of Wisconsin–Madison. The University of Chicago Press, Chicago 60637 The University of Chicago Press, Ltd., London © 2007 by the University of Chicago All rights reserved. Published 2007 Printed in the United States of America 1615141312111009080712345 Set ISBN-10: 0-226-90732-5 (cloth) ISBN-13: 978-0-226-90732-1 (cloth) Part 1 ISBN-10: 0-226-90733-3 (cloth) ISBN-13: 978-0-226-90733-8 (cloth) Part 2 ISBN-10: 0-226-90734-1 (cloth) ISBN-13: 978-0-226-90734-5 (cloth) Editorial work on The History of Cartography is supported in part by grants from the Division of Preservation and Access of the National Endowment for the Humanities and the Geography and Regional Science Program and Science and Society Program of the National Science Foundation, independent federal agencies. -
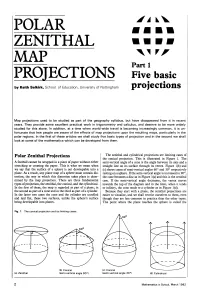
Polar Zenithal Map Projections
POLAR ZENITHAL MAP Part 1 PROJECTIONS Five basic by Keith Selkirk, School of Education, University of Nottingham projections Map projections used to be studied as part of the geography syllabus, but have disappeared from it in recent years. They provide some excellent practical work in trigonometry and calculus, and deserve to be more widely studied for this alone. In addition, at a time when world-wide travel is becoming increasingly common, it is un- fortunate that few people are aware of the effects of map projections upon the resulting maps, particularly in the polar regions. In the first of these articles we shall study five basic types of projection and in the second we shall look at some of the mathematics which can be developed from them. Polar Zenithal Projections The zenithal and cylindrical projections are limiting cases of the conical projection. This is illustrated in Figure 1. The A football cannot be wrapped in a piece of paper without either semi-vertical angle of a cone is the angle between its axis and a stretching or creasing the paper. This is what we mean when straight line on its surface through its vertex. Figure l(b) and we say that the surface of a sphere is not developable into a (c) shows cones of semi-vertical angles 600 and 300 respectively plane. As a result, any plane map of a sphere must contain dis- resting on a sphere. If the semi-vertical angle is increased to 900, tortion; the way in which this distortion takes place is deter- the cone becomes a disc as in Figure l(a) and this is the zenithal mined by the map projection. -

Notes on Projections Part II - Common Projections James R
Notes on Projections Part II - Common Projections James R. Clynch 2003 I. Common Projections There are several areas where maps are commonly used and a few projections dominate these fields. An extensive list is given at the end of the Introduction Chapter in Snyder. Here just a few will be given. Whole World Mercator Most common world projection. Cylindrical Robinson Less distortion than Mercator. Pseudocylindrical Goode Interrupted map. Common for thematic maps. Navigation Charts UTM Common for ocean charts. Part of military map system. UPS For polar regions. Part of military map system. Lambert Lambert Conformal Conic standard in Air Navigation Charts Topographic Maps Polyconic US Geological Survey Standard. UTM coordinates on margins. Surveying / Land Use / General Adlers Equal Area (Conic) Transverse Mercator For areas mainly North-South Lambert For areas mainly East-West A discussion of these and a few others follows. For an extensive list see Snyder. The two maps that form the military grid reference system (MGRS) the UTM and UPS are discussed in detail in a separate note. II. Azimuthal or Planar Projections I you project a globe on a plane that is tangent or symmetric about the polar axis the azimuths to the center point are all true. This leads to the name Azimuthal for projections on a plane. There are 4 common projections that use a plane as the projection surface. Three are perspective. The fourth is the simple polar plot that has the official name equidistant azimuthal projection. The three perspective azimuthal projections are shown below. They differ in the location of the perspective or projection point.