The Mathematics Behind Anamorphic Art
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Catoptric Anamorphosis on Free-Form Reflective Surfaces Francesco Di Paola, Pietro Pedone
7 / 2020 Catoptric Anamorphosis on Free-Form Reflective Surfaces Francesco Di Paola, Pietro Pedone Abstract The study focuses on the definition of a geometric methodology for the use of catoptric anamorphosis in contemporary architecture. The particular projective phenomenon is illustrated, showing typological-geometric properties, responding to mechanisms of light re- flection. It is pointed out that previous experience, over the centuries, employed the technique, relegating its realisation exclusively to reflecting devices realised by simple geometries, on a small scale and almost exclusively for convex mirrors. Wanting to extend the use of the projective phenomenon and experiment with the expressive potential on reflective surfaces of a complex geometric free-form nature, traditional geometric methods limit the design and prior control of the results, thus causing the desired effect to fail. Therefore, a generalisable methodological process of implementation is proposed, defined through the use of algorithmic-parametric procedures, for the determination of deformed images, describing possible subsequent developments. Keywords: anamorphosis, science of representation, generative algorithm, free-form, design. Introduction The study investigates the theme of anamorphosis, a 17th The resulting applications require mastery in the use of the century neologism, from the Greek ἀναμόρϕωσις “rifor- various techniques of the Science of Representation aimed mazione”, “reformation”, derivation of ἀναμορϕόω “to at the formulation of the rule for the “deformation” and form again”. “regeneration” of represented images [Di Paola, Inzerillo, It is an original and curious geometric procedure through Santagati 2016]. which it is possible to represent figures on surfaces, mak- There is a particular form of expression, in art and in eve- ing their projections comprehensible only if observed ryday life, of anamorphic optical illusions usually referred from a particular point of view, chosen in advance by the to as “ catoptric “ or “ specular “. -
Polar Zenithal Map Projections
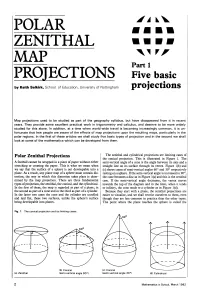
POLAR ZENITHAL MAP Part 1 PROJECTIONS Five basic by Keith Selkirk, School of Education, University of Nottingham projections Map projections used to be studied as part of the geography syllabus, but have disappeared from it in recent years. They provide some excellent practical work in trigonometry and calculus, and deserve to be more widely studied for this alone. In addition, at a time when world-wide travel is becoming increasingly common, it is un- fortunate that few people are aware of the effects of map projections upon the resulting maps, particularly in the polar regions. In the first of these articles we shall study five basic types of projection and in the second we shall look at some of the mathematics which can be developed from them. Polar Zenithal Projections The zenithal and cylindrical projections are limiting cases of the conical projection. This is illustrated in Figure 1. The A football cannot be wrapped in a piece of paper without either semi-vertical angle of a cone is the angle between its axis and a stretching or creasing the paper. This is what we mean when straight line on its surface through its vertex. Figure l(b) and we say that the surface of a sphere is not developable into a (c) shows cones of semi-vertical angles 600 and 300 respectively plane. As a result, any plane map of a sphere must contain dis- resting on a sphere. If the semi-vertical angle is increased to 900, tortion; the way in which this distortion takes place is deter- the cone becomes a disc as in Figure l(a) and this is the zenithal mined by the map projection. -

Fictional Illustration Language with Reference to MC Escher and Istvan
New Trends and Issues Proceedings on Humanities and Social Sciences Volume 4, Issue 11, (2017) 156-163 ISSN : 2547-881 www.prosoc.eu Selected Paper of 6th World Conference on Design and Arts (WCDA 2017), 29 June – 01 July 2017, University of Zagreb, Zagreb – Croatia Fictional Illustration Language with Reference to M. C. Escher and Istvan Orosz Examples Banu Bulduk Turkmen a*, Faculty of Fine Arts, Department of Graphics, Hacettepe University, Ankara 06800, Turkey Suggested Citation: Turkmen, B. B. (2017). Fictional illustration language with reference to M. C. Escher and Istvan Orosz examples. New Trends and Issues Proceedings on Humanities and Social Sciences. [Online]. 4(11), 156-163. Available from: www.prosoc.eu Selection and peer review under responsibility of Prof. Dr. Ayse Cakır Ilhan, Ankara University, Turkey. ©2017 SciencePark Research, Organization & Counseling. All rights reserved. Abstract Alternative approaches in illustration language have constantly been developing in terms of material and technical aspects. Illustration languages also differ in terms of semantics and form. Differences in formal expressions for increasing the effect of the subject on the audience lead to diversity in the illustrations. M. C. Escher’s three-dimensional images to be perceived in a two-dimensional environment, together with mathematical and symmetry-oriented studies and the systematic formed by a numerical structure in its background, are associated with the notion of illustration in terms of fictional meaning. Istvan Orosz used the technique of anamorphosis and made it possible for people to see their perception abilities and visual perception sensitivities in different environments created by him. This study identifies new approaches and illustration languages based on the works of both artists, bringing an alternative proposition to illustration languages in terms of systematic sub-structure and fictional idea sketches. -

Map Projections
Map Projections Chapter 4 Map Projections What is map projection? Why are map projections drawn? What are the different types of projections? Which projection is most suitably used for which area? In this chapter, we will seek the answers of such essential questions. MAP PROJECTION Map projection is the method of transferring the graticule of latitude and longitude on a plane surface. It can also be defined as the transformation of spherical network of parallels and meridians on a plane surface. As you know that, the earth on which we live in is not flat. It is geoid in shape like a sphere. A globe is the best model of the earth. Due to this property of the globe, the shape and sizes of the continents and oceans are accurately shown on it. It also shows the directions and distances very accurately. The globe is divided into various segments by the lines of latitude and longitude. The horizontal lines represent the parallels of latitude and the vertical lines represent the meridians of the longitude. The network of parallels and meridians is called graticule. This network facilitates drawing of maps. Drawing of the graticule on a flat surface is called projection. But a globe has many limitations. It is expensive. It can neither be carried everywhere easily nor can a minor detail be shown on it. Besides, on the globe the meridians are semi-circles and the parallels 35 are circles. When they are transferred on a plane surface, they become intersecting straight lines or curved lines. 2021-22 Practical Work in Geography NEED FOR MAP PROJECTION The need for a map projection mainly arises to have a detailed study of a 36 region, which is not possible to do from a globe. -
'The Hurwitz Singularity'
‘The Hurwitz Singularity’ “In a moment of self-doubt in 2003, (Portrait of Edward VI, 1546) I rushed I wondered into the National Portrait home and within hours was devouring Gallery and tumbled across a strange the works of Escher, Da Vinci and many anamorphic piece by William Scrots more. In a breath I had found ‘brothers’.” 2 The art of anamorphic perspective. Not being the only one perspective has been to admire Hurwitz’s work, Colossal present, in the world of art, Magazine identified that ‘some Tsince the great Leonardo figurative sculptors carve their Da Vinci. It can be said that Da Vinci artworks from unforgiving stone, was the first artist to use anamorphic while others carefully morph the perspective, within the arts, followed human form from soft blocks of clay. by legends such as Hans Holbein Artist Jonty Hurwitz begins with over and Andreas Pozzo, who also used a billion computer calculations before anamorphic perspective within their spending months considering how to art. The two principal techniques materialize his warped ideas using of Anamorphosis are ‘perspective perspex, steel, resin, or copper.’[3] (oblique) and mirror (catoptric).’ [1] The Technique that I will be discussing is most familiar to relate to oblique Anamorphosis. It can be created using Graphic design techniques of perspective and using innovative print and precise design strategies. My first interest in anamorphic perspective was when producing an entry for the ‘Design Museum; 2014 Competition brief: Surprise.’[2] The theme of Surprise led me to discover the astonishment that viewers of anamorphic perspective art felt. Artists such as Jonty Hurwitz, joseph Egan and hunter Thomson; all of which are recognised for their modern approach to Anamorphosis, also created this amazement with their art. -
Maps and Cartography: Map Projections a Tutorial Created by the GIS Research & Map Collection
Maps and Cartography: Map Projections A Tutorial Created by the GIS Research & Map Collection Ball State University Libraries A destination for research, learning, and friends What is a map projection? Map makers attempt to transfer the earth—a round, spherical globe—to flat paper. Map projections are the different techniques used by cartographers for presenting a round globe on a flat surface. Angles, areas, directions, shapes, and distances can become distorted when transformed from a curved surface to a plane. Different projections have been designed where the distortion in one property is minimized, while other properties become more distorted. So map projections are chosen based on the purposes of the map. Keywords •azimuthal: projections with the property that all directions (azimuths) from a central point are accurate •conformal: projections where angles and small areas’ shapes are preserved accurately •equal area: projections where area is accurate •equidistant: projections where distance from a standard point or line is preserved; true to scale in all directions •oblique: slanting, not perpendicular or straight •rhumb lines: lines shown on a map as crossing all meridians at the same angle; paths of constant bearing •tangent: touching at a single point in relation to a curve or surface •transverse: at right angles to the earth’s axis Models of Map Projections There are two models for creating different map projections: projections by presentation of a metric property and projections created from different surfaces. • Projections by presentation of a metric property would include equidistant, conformal, gnomonic, equal area, and compromise projections. These projections account for area, shape, direction, bearing, distance, and scale. -
Representations of Celestial Coordinates in FITS
A&A 395, 1077–1122 (2002) Astronomy DOI: 10.1051/0004-6361:20021327 & c ESO 2002 Astrophysics Representations of celestial coordinates in FITS M. R. Calabretta1 and E. W. Greisen2 1 Australia Telescope National Facility, PO Box 76, Epping, NSW 1710, Australia 2 National Radio Astronomy Observatory, PO Box O, Socorro, NM 87801-0387, USA Received 24 July 2002 / Accepted 9 September 2002 Abstract. In Paper I, Greisen & Calabretta (2002) describe a generalized method for assigning physical coordinates to FITS image pixels. This paper implements this method for all spherical map projections likely to be of interest in astronomy. The new methods encompass existing informal FITS spherical coordinate conventions and translations from them are described. Detailed examples of header interpretation and construction are given. Key words. methods: data analysis – techniques: image processing – astronomical data bases: miscellaneous – astrometry 1. Introduction PIXEL p COORDINATES j This paper is the second in a series which establishes conven- linear transformation: CRPIXja r j tions by which world coordinates may be associated with FITS translation, rotation, PCi_ja mij (Hanisch et al. 2001) image, random groups, and table data. skewness, scale CDELTia si Paper I (Greisen & Calabretta 2002) lays the groundwork by developing general constructs and related FITS header key- PROJECTION PLANE x words and the rules for their usage in recording coordinate in- COORDINATES ( ,y) formation. In Paper III, Greisen et al. (2002) apply these meth- spherical CTYPEia (φ0,θ0) ods to spectral coordinates. Paper IV (Calabretta et al. 2002) projection PVi_ma Table 13 extends the formalism to deal with general distortions of the co- ordinate grid. -

Anamorphosis: Optical Games with Perspective’S Playful Parent
Anamorphosis: Optical games with Perspective's Playful Parent Ant´onioAra´ujo∗ Abstract We explore conical anamorphosis in several variations and discuss its various constructions, both physical and diagrammatic. While exploring its playful aspect as a form of optical illusion, we argue against the prevalent perception of anamorphosis as a mere amusing derivative of perspective and defend the exact opposite view|that perspective is the derived concept, consisting of plane anamorphosis under arbitrary limitations and ad-hoc alterations. We show how to define vanishing points in the context of anamorphosis in a way that is valid for all anamorphs of the same set. We make brief observations regarding curvilinear perspectives, binocular anamorphoses, and color anamorphoses. Keywords: conical anamorphosis, optical illusion, perspective, curvilinear perspective, cyclorama, panorama, D¨urermachine, color anamorphosis. Introduction It is a common fallacy to assume that something playful is surely shallow. Conversely, a lack of playfulness is often taken for depth. Consider the split between the common views on anamorphosis and perspective: perspective gets all the serious gigs; it's taught at school, works at the architect's firm. What does anamorphosis do? It plays parlour tricks! What a joker! It even has a rather awkward dictionary definition: Anamorphosis: A distorted projection or drawing which appears normal when viewed from a particular point or with a suitable mirror or lens. (Oxford English Dictionary) ∗This work was supported by FCT - Funda¸c~aopara a Ci^enciae a Tecnologia, projects UID/MAT/04561/2013, UID/Multi/04019/2013. Proceedings of Recreational Mathematics Colloquium v - G4G (Europe), pp. 71{86 72 Anamorphosis: Optical games. -

Distortion-Free Wide-Angle Portraits on Camera Phones
Distortion-Free Wide-Angle Portraits on Camera Phones YICHANG SHIH, WEI-SHENG LAI, and CHIA-KAI LIANG, Google (a) A wide-angle photo with distortions on subjects’ faces. (b) Distortion-free photo by our method. Fig. 1. (a) A group selfie taken by a wide-angle 97° field-of-view phone camera. The perspective projection renders unnatural look to faces on the periphery: they are stretched, twisted, and squished. (b) Our algorithm restores all the distorted face shapes and keeps the background unaffected. Photographers take wide-angle shots to enjoy expanding views, group por- ACM Reference Format: traits that never miss anyone, or composite subjects with spectacular scenery background. In spite of the rapid proliferation of wide-angle cameras on YiChang Shih, Wei-Sheng Lai, and Chia-Kai Liang. 2019. Distortion-Free mobile phones, a wider field-of-view (FOV) introduces a stronger perspec- Wide-Angle Portraits on Camera Phones. ACM Trans. Graph. 38, 4, Article 61 tive distortion. Most notably, faces are stretched, squished, and skewed, to (July 2019), 12 pages. https://doi.org/10.1145/3306346.3322948 look vastly different from real-life. Correcting such distortions requires pro- fessional editing skills, as trivial manipulations can introduce other kinds of distortions. This paper introduces a new algorithm to undistort faces 1 INTRODUCTION without affecting other parts of the photo. Given a portrait as an input,we formulate an optimization problem to create a content-aware warping mesh Empowered with extra peripheral vi- FOV=97° which locally adapts to the stereographic projection on facial regions, and sion to “see”, a wide-angle lens is FOV=76° seamlessly evolves to the perspective projection over the background. -

STEREOGRAPHIC PROJECTION IS CONFORMAL Let S2
STEREOGRAPHIC PROJECTION IS CONFORMAL Let S2 = {(x,y,z) ∈ R3 : x2 + y2 + z2 =1} be the unit sphere, and let n denote the north pole (0, 0, 1). Identify the complex plane C with the (x, y)-plane in R3. The stereographic projection map, π : S2 − n −→ C, is described as follows: place a light source at the north pole n. For any point p ∈ S2 − n, consider a light ray emanating downward from n to pass through the sphere at p. The ray also meets the plane, and the point where it hits is π(p). That is, π(p)= ℓ(n,p) ∩ R2, where ℓ(n,p)= {(1 − t)n + tp : t ∈ R} is the line through n and p. (See figure 1.) Figure 1. Stereographic projection The formula for stereographic projection is x + iy π(x,y,z)= . 1 − z Indeed, the point (1 − t)n + t(x,y,z) has last coordinate 1 − t + tz. This equals 0 for t = 1/(1 − z), making the other coordinates x/(1 − z) and y/(1 − z), and the formula follows. For the inverse map, take a point q = (x, y, 0) in the plane. Since n and q are orthogonal, any point p = (1 − t)n + tq on the line ℓ(n, q) satisfies |p|2 = (1 − t)2 + t2|q|2. This equals 1 for t =2/(|q|2 + 1) (ignoring t = 0, which gives the north pole), showing that 2 2 − 2x 2y x + y − 1 π 1(x, y)= , , . x2 + y2 +1 x2 + y2 +1 x2 + y2 +1 1 2 STEREOGRAPHIC PROJECTION IS CONFORMAL Stereographic projection is conformal, meaning that it preserves angles between 2 curves. -

Optimize the Placement of Print Advertisement and Signage By
Advances in Social Science, Education and Humanities Research, volume 207 3rd International Conference on Creative Media, Design and Technology (REKA 2018) Optimize The Placement Of Print Advertisement And Signage By Anamorphic Illusion Ho Jie Lin Mohammad Khizal Saat Tetriana Ahmad Fauzi School of the Arts, School of the Arts, School of the Arts, Universiti Sains Malaysia Universiti Sains Malaysia Universiti Sains Malaysia Penang, Malaysia Penang, Malaysia Penang, Malaysia [email protected] [email protected] [email protected] Abstract Print advertisement is a mean to communicate about products, services or ideas which is intended to inform or influence people who received the message that is usually persuasive by nature and paid by the related sponsors. Strategic placement of advertisement and signage is one of the crucial key of effective communication. Brand recognition can be built through a well designed advertising which is strategically placed. A well develop media placement plan can save marketer from unnecessary and wasteful spending. Placement of advertisement and signage is often constrained by the space and structure of place or location. Visual placement is referring to the place in which a message is portrayed and displayed. The limitation includes the structure of building, the size and space of the placement and the viewing perspective of viewers. This research aimed to study anamorphic illusion as a new creative visual language to deliver message in advertisement to the audience. It also explored the relationship between the laws of perspective and the message portraying tactics and styles. With the analysis of the above study, it will develop a new artistic technique to optimize the visibility of message by overcoming the limitation of visual placement. -

Constructing 3D Perspective Anamorphosis Via Surface Projection
Bridges 2018 Conference Proceedings Constructing 3D Perspective Anamorphosis via Surface Projection Tiffany C. Inglis D2L, Waterloo, ON, Canada; [email protected] Abstract 3D perspective anamorphoses, as defined in this paper, are 3D objects that create anamorphic illusions when viewed from a particular perspective. We present an algorithm of constructing 3D perspective anamorphoses by projecting onto surfaces. Introduction An anamorphosis is an object that looks distorted unless viewed in a special way. The method of distortion characterizes two main categories of anamorphic illusions: perspective (viewed from a particular perspec- tive) and mirror (viewed through a mirror). The object of distortion also falls into two types: 2D images and 3D models. Figure 1 shows an example from each category. Odeith’s [3] and Orosz’s [4] work are both 2D anamorphoses since they are 2D drawings that “come to life” (either by appearing 3D or revealing hid- den images) when viewed from a certain angle or through a mirror. 3D anamorphoses include Hamaekers’s sculpture [5] depicting an impossible triangle with curved edges, and De Comite’s´ sculpture [1] also using curved edges to create the illusion of a polygonal structure in the spherical mirror. A 2D anamorphosis is essentially an image projected onto some surface either via perspective projection or mirror reflection. For simple surfaces and mirrors, the design can be drawn manually using distorted grids. With more complex inputs, dedicated software such as Anamorph Me! [2] can automatically apply the necessary distortions. An artist may also use a projector in combination with projection mapping software to directly project their designs onto surfaces with complex geometry.