Figure 1. Stereographic Projection from North Pole in Lecture 3 We
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Polar Zenithal Map Projections
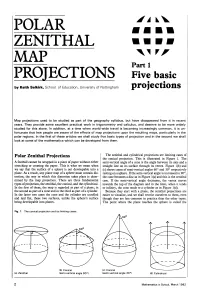
POLAR ZENITHAL MAP Part 1 PROJECTIONS Five basic by Keith Selkirk, School of Education, University of Nottingham projections Map projections used to be studied as part of the geography syllabus, but have disappeared from it in recent years. They provide some excellent practical work in trigonometry and calculus, and deserve to be more widely studied for this alone. In addition, at a time when world-wide travel is becoming increasingly common, it is un- fortunate that few people are aware of the effects of map projections upon the resulting maps, particularly in the polar regions. In the first of these articles we shall study five basic types of projection and in the second we shall look at some of the mathematics which can be developed from them. Polar Zenithal Projections The zenithal and cylindrical projections are limiting cases of the conical projection. This is illustrated in Figure 1. The A football cannot be wrapped in a piece of paper without either semi-vertical angle of a cone is the angle between its axis and a stretching or creasing the paper. This is what we mean when straight line on its surface through its vertex. Figure l(b) and we say that the surface of a sphere is not developable into a (c) shows cones of semi-vertical angles 600 and 300 respectively plane. As a result, any plane map of a sphere must contain dis- resting on a sphere. If the semi-vertical angle is increased to 900, tortion; the way in which this distortion takes place is deter- the cone becomes a disc as in Figure l(a) and this is the zenithal mined by the map projection. -

Map Projections
Map Projections Chapter 4 Map Projections What is map projection? Why are map projections drawn? What are the different types of projections? Which projection is most suitably used for which area? In this chapter, we will seek the answers of such essential questions. MAP PROJECTION Map projection is the method of transferring the graticule of latitude and longitude on a plane surface. It can also be defined as the transformation of spherical network of parallels and meridians on a plane surface. As you know that, the earth on which we live in is not flat. It is geoid in shape like a sphere. A globe is the best model of the earth. Due to this property of the globe, the shape and sizes of the continents and oceans are accurately shown on it. It also shows the directions and distances very accurately. The globe is divided into various segments by the lines of latitude and longitude. The horizontal lines represent the parallels of latitude and the vertical lines represent the meridians of the longitude. The network of parallels and meridians is called graticule. This network facilitates drawing of maps. Drawing of the graticule on a flat surface is called projection. But a globe has many limitations. It is expensive. It can neither be carried everywhere easily nor can a minor detail be shown on it. Besides, on the globe the meridians are semi-circles and the parallels 35 are circles. When they are transferred on a plane surface, they become intersecting straight lines or curved lines. 2021-22 Practical Work in Geography NEED FOR MAP PROJECTION The need for a map projection mainly arises to have a detailed study of a 36 region, which is not possible to do from a globe. -
Maps and Cartography: Map Projections a Tutorial Created by the GIS Research & Map Collection
Maps and Cartography: Map Projections A Tutorial Created by the GIS Research & Map Collection Ball State University Libraries A destination for research, learning, and friends What is a map projection? Map makers attempt to transfer the earth—a round, spherical globe—to flat paper. Map projections are the different techniques used by cartographers for presenting a round globe on a flat surface. Angles, areas, directions, shapes, and distances can become distorted when transformed from a curved surface to a plane. Different projections have been designed where the distortion in one property is minimized, while other properties become more distorted. So map projections are chosen based on the purposes of the map. Keywords •azimuthal: projections with the property that all directions (azimuths) from a central point are accurate •conformal: projections where angles and small areas’ shapes are preserved accurately •equal area: projections where area is accurate •equidistant: projections where distance from a standard point or line is preserved; true to scale in all directions •oblique: slanting, not perpendicular or straight •rhumb lines: lines shown on a map as crossing all meridians at the same angle; paths of constant bearing •tangent: touching at a single point in relation to a curve or surface •transverse: at right angles to the earth’s axis Models of Map Projections There are two models for creating different map projections: projections by presentation of a metric property and projections created from different surfaces. • Projections by presentation of a metric property would include equidistant, conformal, gnomonic, equal area, and compromise projections. These projections account for area, shape, direction, bearing, distance, and scale. -
Representations of Celestial Coordinates in FITS
A&A 395, 1077–1122 (2002) Astronomy DOI: 10.1051/0004-6361:20021327 & c ESO 2002 Astrophysics Representations of celestial coordinates in FITS M. R. Calabretta1 and E. W. Greisen2 1 Australia Telescope National Facility, PO Box 76, Epping, NSW 1710, Australia 2 National Radio Astronomy Observatory, PO Box O, Socorro, NM 87801-0387, USA Received 24 July 2002 / Accepted 9 September 2002 Abstract. In Paper I, Greisen & Calabretta (2002) describe a generalized method for assigning physical coordinates to FITS image pixels. This paper implements this method for all spherical map projections likely to be of interest in astronomy. The new methods encompass existing informal FITS spherical coordinate conventions and translations from them are described. Detailed examples of header interpretation and construction are given. Key words. methods: data analysis – techniques: image processing – astronomical data bases: miscellaneous – astrometry 1. Introduction PIXEL p COORDINATES j This paper is the second in a series which establishes conven- linear transformation: CRPIXja r j tions by which world coordinates may be associated with FITS translation, rotation, PCi_ja mij (Hanisch et al. 2001) image, random groups, and table data. skewness, scale CDELTia si Paper I (Greisen & Calabretta 2002) lays the groundwork by developing general constructs and related FITS header key- PROJECTION PLANE x words and the rules for their usage in recording coordinate in- COORDINATES ( ,y) formation. In Paper III, Greisen et al. (2002) apply these meth- spherical CTYPEia (φ0,θ0) ods to spectral coordinates. Paper IV (Calabretta et al. 2002) projection PVi_ma Table 13 extends the formalism to deal with general distortions of the co- ordinate grid. -

Distortion-Free Wide-Angle Portraits on Camera Phones
Distortion-Free Wide-Angle Portraits on Camera Phones YICHANG SHIH, WEI-SHENG LAI, and CHIA-KAI LIANG, Google (a) A wide-angle photo with distortions on subjects’ faces. (b) Distortion-free photo by our method. Fig. 1. (a) A group selfie taken by a wide-angle 97° field-of-view phone camera. The perspective projection renders unnatural look to faces on the periphery: they are stretched, twisted, and squished. (b) Our algorithm restores all the distorted face shapes and keeps the background unaffected. Photographers take wide-angle shots to enjoy expanding views, group por- ACM Reference Format: traits that never miss anyone, or composite subjects with spectacular scenery background. In spite of the rapid proliferation of wide-angle cameras on YiChang Shih, Wei-Sheng Lai, and Chia-Kai Liang. 2019. Distortion-Free mobile phones, a wider field-of-view (FOV) introduces a stronger perspec- Wide-Angle Portraits on Camera Phones. ACM Trans. Graph. 38, 4, Article 61 tive distortion. Most notably, faces are stretched, squished, and skewed, to (July 2019), 12 pages. https://doi.org/10.1145/3306346.3322948 look vastly different from real-life. Correcting such distortions requires pro- fessional editing skills, as trivial manipulations can introduce other kinds of distortions. This paper introduces a new algorithm to undistort faces 1 INTRODUCTION without affecting other parts of the photo. Given a portrait as an input,we formulate an optimization problem to create a content-aware warping mesh Empowered with extra peripheral vi- FOV=97° which locally adapts to the stereographic projection on facial regions, and sion to “see”, a wide-angle lens is FOV=76° seamlessly evolves to the perspective projection over the background. -

STEREOGRAPHIC PROJECTION IS CONFORMAL Let S2
STEREOGRAPHIC PROJECTION IS CONFORMAL Let S2 = {(x,y,z) ∈ R3 : x2 + y2 + z2 =1} be the unit sphere, and let n denote the north pole (0, 0, 1). Identify the complex plane C with the (x, y)-plane in R3. The stereographic projection map, π : S2 − n −→ C, is described as follows: place a light source at the north pole n. For any point p ∈ S2 − n, consider a light ray emanating downward from n to pass through the sphere at p. The ray also meets the plane, and the point where it hits is π(p). That is, π(p)= ℓ(n,p) ∩ R2, where ℓ(n,p)= {(1 − t)n + tp : t ∈ R} is the line through n and p. (See figure 1.) Figure 1. Stereographic projection The formula for stereographic projection is x + iy π(x,y,z)= . 1 − z Indeed, the point (1 − t)n + t(x,y,z) has last coordinate 1 − t + tz. This equals 0 for t = 1/(1 − z), making the other coordinates x/(1 − z) and y/(1 − z), and the formula follows. For the inverse map, take a point q = (x, y, 0) in the plane. Since n and q are orthogonal, any point p = (1 − t)n + tq on the line ℓ(n, q) satisfies |p|2 = (1 − t)2 + t2|q|2. This equals 1 for t =2/(|q|2 + 1) (ignoring t = 0, which gives the north pole), showing that 2 2 − 2x 2y x + y − 1 π 1(x, y)= , , . x2 + y2 +1 x2 + y2 +1 x2 + y2 +1 1 2 STEREOGRAPHIC PROJECTION IS CONFORMAL Stereographic projection is conformal, meaning that it preserves angles between 2 curves. -
![Arxiv:1204.4952V2 [Math.HO] 17 May 2012](https://docslib.b-cdn.net/cover/2138/arxiv-1204-4952v2-math-ho-17-may-2012-2612138.webp)
Arxiv:1204.4952V2 [Math.HO] 17 May 2012
Sculptures in S3 Saul Schleimer Henry Segerman∗ Mathematics Institute Department of Mathematics and Statistics University of Warwick University of Melbourne Coventry CV4 7AL Parkville VIC 3010 United Kingdom Australia [email protected] [email protected] Abstract We construct a number of sculptures, each based on a geometric design native to the three-dimensional sphere. Using stereographic projection we transfer the design from the three-sphere to ordinary Euclidean space. All of the sculptures are then fabricated by the 3D printing service Shapeways. 1 Introduction The three-sphere, denoted S3, is a three-dimensional analog of the ordinary two-dimensional sphere, S2. In n+ general, the n–dimensional sphere is a subset of Euclidean space, R 1, as follows: n n+1 2 2 2 S = f(x0;x1;:::;xn) 2 R j x0 + x1 + ··· + xn = 1g: Thus S2 can be seen as the usual unit sphere in R3. Visualising objects in dimensions higher than three is non-trivial. However for S3 we can use stereographic projection to reduce the dimension from four to three. n n n Let N = (0;:::;0;1) be the north pole of S . We define stereographic projection r : S − fNg ! R by x0 x1 xn−1 r(x0;x1;:::;xn) = ; ;:::; : 1 − xn 1 − xn 1 − xn See [1, page 27]. Figure 1a displays stereographic projection in dimension one. For any point (x;y) 2 S1 − fNg draw the straight line L through N and (x;y). Then L meets R1 at a single point; this is r(x;y). Notice that the figure is also a two-dimensional cross-section of stereographic projection in any dimension. -

Stereographic Projection in the Plane Consider the Unit Circle S1 Defined by X2 + Z2 = 1 in the (X, Z)-Plane
College of the Holy Cross, Spring 2013 Math 392 (Hyperbolic Geometry) Stereographic Projection Stereographic Projection in the Plane Consider the unit circle S1 defined by x2 + z2 = 1 in the (x, z)-plane. The point N = (0, 1) is the north pole and its antipode S = (0, −1) is the south pole. Each non-horizontal line through N intersects the circle in exactly one point (x, z) 6= N, and intersects the x-axis in exactly one point, u. We may therefore view the circle S1 as the number line with a single point added “at infinity”. N = (0, 1) (x, z) u 1 Definition 1. The mapping πN : S \{N} → R defined by πN (x, z) = u is called −1 1 stereographic projection (away from N). The inverse map πN : R → S \{N} is called the rational parameterization of the circle. Theorem 2. For all (x, z) with z < 1 on the circle, and for all real u, we have x 2u u2 − 1 π (x, z) = , π−1(u) = , . N 1 − z N u2 + 1 u2 + 1 Proof. By similar triangles (dashed lines in the figure), u/1 = (u − x)/z. Rear- ranging to solve for u, we have uz = u − x, or x = u(1 − z), or u = x/(1 − z). For the inverse map, since x2 + z2 = 1, or x2 = 1 − z2 = (1 − z)(1 + z), substitution gives u2(1 − z)2 = (1 − z)(1 + z). As long as z < 1 (i.e., (x, z) 6= N), we have u2(1 − z) = 1 + z, or u2 − 1 = z(u2 + 1). -

SIMPLE GNOMONIC PROTECTOR for X-RAY LAUEGRAMS S,Tuurr
SIMPLE GNOMONIC PROTECTOR FOR X-RAY LAUEGRAMS S,tuurr, G. Gonoox, The Acad,emyoJ N atural Sciencesof Philadelbhi'a. ABsrRAcr The indexing of Lauegrams requires transposition of the Laue spots (wbich are at tan20) to tan d (stereographic trace of plane pole in F-Laue, and gnomonic piane-pole in B-Laue) or to cot d (gnomonic plane-pole of F-Laue). The geometry involved is simple: to the line through the Laue spot and the center of the Lauegram draw the unit circle (5 cm. radius for D:5 cm. in camera), tangent to the line at the center of the Lauegram. From the Laue spot draw a line through the center of the circle. Erect perpendiculars to this line, tangent to each side of the unit circle. It is easily proven that the intersecticns o{ these tangents with that of the tangent through the Laue spot and the center of Lauegram are the points required 0, and 90o-0. A simple transporteur may be constructed by swivelling a carpenter's square to a straight-edge, such that the center of rotation is 5 cm. below the straight edge used to connect Laue spot and center of Lauegram; and the vertical arm moves tangent to it at the required distance. Such a device was described by Clark and Gross in 1937 for plotting 90o-0.However, the vertical arm can be adjusted to any distance from the center of rotation, giving reductions to 4, 3, 2.5 or 2 cm. as desired. A shorter vertical arm, on the opposite side of the center is used for plotting d. -

Map Projection
Map projection An intro for multivariable calculus Introduction In multivariable calculus, we study higher dimensional calculus, i.e. derivatives and integrals applied to functions mapping Rm to Rn. Viewed in this context, the study of map projection is quite natural since we are mapping the surface of a globe to planar rectangle. The globe is naturally parameterized in terms of two variables, latitude ' and longitude θ. Thus, we could think of a map projection as a function T : R2 ! R2 or T ('; θ) = (x('; θ); y('; θ)). Example map projections The earth, as we well know, is approximately spherical; it is best represented as a globe. For convenience both physical and conceptual, however, we frequently represent the spherical earth with a flat map. Such a representation must involve distortion. The process is illustrated in figure 1. Figure 1: Projecting the globe The projection shown in figure1 is called Mercator's projection. Mercator created his projection in 1569. Although it was not universally adopted immediately, it represented a major breakthrough in navigation because paths of constant compass bearing are represented as straight lines. Ultimately, this property follows from the fact that Mercator's projection is a cylindrical, conformal projection. A major goal of this document is to understand these facts. We won't really fully understand a map projection until we know and understand the formula defin- ing the projection. The formula for Mercator's projection is T ('; θ) = (θ; ln(jsec(') + tan(')j)). Of course, there are a huge number of map projections. Two more cylindrical projections are shown in figure2. -

Mapping the Sphere
Mapping the sphere It is not possible to map a portion of the sphere into the plane without introducing some distortion. There is a lot of evidence for this. For one thing you can do a simple experiment. Cut a grapefruit in half and eat one of the halves. Now try to flatten the remaining peel without the peel tearing. If that is not convincing enough, there are mathematical proofs. One of the nicest uses the formulas for the sum of the angles of a triangle on the sphere and in the plane. The fact that these are different shows that it is not possible to find a map from the sphere to the plane which sends great circles to lines and preserves the angles between them. The question then arises as to what is possible. That is the subject of these pages. We will present a variety of maps and discuss the advantages and disadvantages of each. The easiest such maps are the central projections. Two are presented, the gnomonic projection and the stereographic projection. Although many people think so, the most important map in navigation, the Mercator projection, is not a central pro- jection, and it will be discussed next. Finally we will talk briefly about a map from the sphere to the plane which preserves area, a fact which was observed already by Archimedes and used by him to discover the area of a sphere. All of these maps are currently used in mapping the earth. The reader should consult an atlas, such as those published by Rand Macnally, or the London Times. -
![Arxiv:1703.09233V2 [Astro-Ph.CO] 21 Jul 2021 of the Underlying field](https://docslib.b-cdn.net/cover/2504/arxiv-1703-09233v2-astro-ph-co-21-jul-2021-of-the-underlying-eld-4332504.webp)
Arxiv:1703.09233V2 [Astro-Ph.CO] 21 Jul 2021 of the Underlying field
Mon. Not. R. Astron. Soc. 000,1–18 (2017) Printed 22 July 2021 (MN LaTEX style file v2.2) Mapping dark matter on the celestial sphere with weak gravitational lensing Christopher G. R. Wallis1, Matthew A. Price1?, Jason D. McEwen1, Thomas D. Kitching1, Boris Leistedt2;3, Antoine Plouviez1 1Mullard Space Science Laboratory, University College London, Surrey, RH5 6NT, UK 2Center for Cosmology and Particle Physics, Department of Physics, New York University, New York, NY 10003, USA 3NASA Einstein Fellow Accepted —. Received —; in original form — ABSTRACT Convergence maps of the integrated matter distribution are a key science result from weak gravitational lensing surveys. To date, recovering convergence maps has been performed us- ing a planar approximation of the celestial sphere. However, with the increasing area of sky covered by dark energy experiments, such as Euclid, the Large Synoptic Survey Telescope (LSST), and the Wide Field Infrared Survey Telescope (WFIRST), this assumption will no longer be valid. We recover convergence fields on the celestial sphere using an extension of the Kaiser-Squires estimator to the spherical setting. Through simulations we study the error introduced by planar approximations. Moreover, we examine how best to recover convergence maps in the planar setting, considering a variety of different projections and defining the local rotations that are required when projecting spin fields such as cosmic shear. For the sky cov- erages typical of future surveys, errors introduced by projection effects can be of order tens of percent, exceeding 50% in some cases. The stereographic projection, which is conformal and so preserves local angles, is the most effective planar projection.