Arxiv:1703.09233V2 [Astro-Ph.CO] 21 Jul 2021 of the Underlying field
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Efficient Technique for Creating a Continuum of Equal-Area Map Projections
Cartography and Geographic Information Science ISSN: 1523-0406 (Print) 1545-0465 (Online) Journal homepage: http://www.tandfonline.com/loi/tcag20 An efficient technique for creating a continuum of equal-area map projections Daniel “daan” Strebe To cite this article: Daniel “daan” Strebe (2017): An efficient technique for creating a continuum of equal-area map projections, Cartography and Geographic Information Science, DOI: 10.1080/15230406.2017.1405285 To link to this article: https://doi.org/10.1080/15230406.2017.1405285 View supplementary material Published online: 05 Dec 2017. Submit your article to this journal View related articles View Crossmark data Full Terms & Conditions of access and use can be found at http://www.tandfonline.com/action/journalInformation?journalCode=tcag20 Download by: [4.14.242.133] Date: 05 December 2017, At: 13:13 CARTOGRAPHY AND GEOGRAPHIC INFORMATION SCIENCE, 2017 https://doi.org/10.1080/15230406.2017.1405285 ARTICLE An efficient technique for creating a continuum of equal-area map projections Daniel “daan” Strebe Mapthematics LLC, Seattle, WA, USA ABSTRACT ARTICLE HISTORY Equivalence (the equal-area property of a map projection) is important to some categories of Received 4 July 2017 maps. However, unlike for conformal projections, completely general techniques have not been Accepted 11 November developed for creating new, computationally reasonable equal-area projections. The literature 2017 describes many specific equal-area projections and a few equal-area projections that are more or KEYWORDS less configurable, but flexibility is still sparse. This work develops a tractable technique for Map projection; dynamic generating a continuum of equal-area projections between two chosen equal-area projections. -
Unusual Map Projections Tobler 1999
Unusual Map Projections Waldo Tobler Professor Emeritus Geography department University of California Santa Barbara, CA 93106-4060 http://www.geog.ucsb.edu/~tobler 1 Based on an invited presentation at the 1999 meeting of the Association of American Geographers in Hawaii. Copyright Waldo Tobler 2000 2 Subjects To Be Covered Partial List The earth’s surface Area cartograms Mercator’s projection Combined projections The earth on a globe Azimuthal enlargements Satellite tracking Special projections Mapping distances And some new ones 3 The Mapping Process Common Surfaces Used in cartography 4 The surface of the earth is two dimensional, which is why only (but also both) latitude and longitude are needed to pin down a location. Many authors refer to it as three dimensional. This is incorrect. All map projections preserve the two dimensionality of the surface. The Byte magazine cover from May 1979 shows how the graticule rides up and down over hill and dale. Yes, it is embedded in three dimensions, but the surface is a curved, closed, and bumpy, two dimensional surface. Map projections convert this to a flat two dimensional surface. 5 The Surface of the Earth Is Two-Dimensional 6 The easy way to demonstrate that Mercator’s projection cannot be obtained as a perspective transformation is to draw lines from the latitudes on the projection to their occurrence on a sphere, here represented by an adjoining circle. The rays will not intersect in a point. 7 Mercator’s Projection Is Not Perspective 8 It is sometimes asserted that one disadvantage of a globe is that one cannot see all of the entire earth at one time. -
Polar Zenithal Map Projections
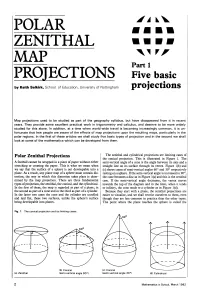
POLAR ZENITHAL MAP Part 1 PROJECTIONS Five basic by Keith Selkirk, School of Education, University of Nottingham projections Map projections used to be studied as part of the geography syllabus, but have disappeared from it in recent years. They provide some excellent practical work in trigonometry and calculus, and deserve to be more widely studied for this alone. In addition, at a time when world-wide travel is becoming increasingly common, it is un- fortunate that few people are aware of the effects of map projections upon the resulting maps, particularly in the polar regions. In the first of these articles we shall study five basic types of projection and in the second we shall look at some of the mathematics which can be developed from them. Polar Zenithal Projections The zenithal and cylindrical projections are limiting cases of the conical projection. This is illustrated in Figure 1. The A football cannot be wrapped in a piece of paper without either semi-vertical angle of a cone is the angle between its axis and a stretching or creasing the paper. This is what we mean when straight line on its surface through its vertex. Figure l(b) and we say that the surface of a sphere is not developable into a (c) shows cones of semi-vertical angles 600 and 300 respectively plane. As a result, any plane map of a sphere must contain dis- resting on a sphere. If the semi-vertical angle is increased to 900, tortion; the way in which this distortion takes place is deter- the cone becomes a disc as in Figure l(a) and this is the zenithal mined by the map projection. -

Geographical Analysis on the Projection and Distortion of IN¯O's
International Journal of Geo-Information Article Geographical Analysis on the Projection and Distortion of INO’s¯ Tokyo Map in 1817 Yuki Iwai 1,* and Yuji Murayama 2 1 Graduate School of Life and Environmental Science, University of Tsukuba, Tsukuba 305-8572, Japan 2 Faculty of Life and Environmental Science, University of Tsukuba, Tsukuba 305-8572, Japan; [email protected] * Correspondence: [email protected]; Tel.: +81-29-853-5696 Received: 5 July 2019; Accepted: 10 October 2019; Published: 12 October 2019 Abstract: The history of modern maps in Japan begins with the Japan maps (called INO’s¯ maps) prepared by Tadataka Ino¯ after he thoroughly surveyed the whole of Japan around 200 years ago. The purpose of this study was to investigate the precision degree of INO’s¯ Tokyo map by overlaying it with present maps and analyzing the map style (map projection, map scale, etc.). Specifically, we quantitatively examined the spatial distortion of INO’s¯ maps through comparisons with the present map using GIS (geographic information system), a spatial analysis tool. Furthermore, by examining various factors that caused the positional gap and distortion of features, we explored the actual situation of surveying in that age from a geographical viewpoint. As a result of the analysis, a particular spatial regularity was confirmed in the positional gaps with the present map. We found that INO’s¯ Tokyo map had considerably high precision. The causes of positional gaps from the present map were related not only to natural conditions, such as areas and land but also to social and cultural phenomena. -

A Bevy of Area Preserving Transforms for Map Projection Designers.Pdf
Cartography and Geographic Information Science ISSN: 1523-0406 (Print) 1545-0465 (Online) Journal homepage: http://www.tandfonline.com/loi/tcag20 A bevy of area-preserving transforms for map projection designers Daniel “daan” Strebe To cite this article: Daniel “daan” Strebe (2018): A bevy of area-preserving transforms for map projection designers, Cartography and Geographic Information Science, DOI: 10.1080/15230406.2018.1452632 To link to this article: https://doi.org/10.1080/15230406.2018.1452632 Published online: 05 Apr 2018. Submit your article to this journal View related articles View Crossmark data Full Terms & Conditions of access and use can be found at http://www.tandfonline.com/action/journalInformation?journalCode=tcag20 CARTOGRAPHY AND GEOGRAPHIC INFORMATION SCIENCE, 2018 https://doi.org/10.1080/15230406.2018.1452632 A bevy of area-preserving transforms for map projection designers Daniel “daan” Strebe Mapthematics LLC, Seattle, WA, USA ABSTRACT ARTICLE HISTORY Sometimes map projection designers need to create equal-area projections to best fill the Received 1 January 2018 projections’ purposes. However, unlike for conformal projections, few transformations have Accepted 12 March 2018 been described that can be applied to equal-area projections to develop new equal-area projec- KEYWORDS tions. Here, I survey area-preserving transformations, giving examples of their applications and Map projection; equal-area proposing an efficient way of deploying an equal-area system for raster-based Web mapping. projection; area-preserving Together, these transformations provide a toolbox for the map projection designer working in transformation; the area-preserving domain. area-preserving homotopy; Strebe 1995 projection 1. Introduction two categories: plane-to-plane transformations and “sphere-to-sphere” transformations – but in quotes It is easy to construct a new conformal projection: Find because the manifold need not be a sphere at all. -
Bibliography of Map Projections
AVAILABILITY OF BOOKS AND MAPS OF THE U.S. GEOlOGICAL SURVEY Instructions on ordering publications of the U.S. Geological Survey, along with prices of the last offerings, are given in the cur rent-year issues of the monthly catalog "New Publications of the U.S. Geological Survey." Prices of available U.S. Geological Sur vey publications released prior to the current year are listed in the most recent annual "Price and Availability List" Publications that are listed in various U.S. Geological Survey catalogs (see back inside cover) but not listed in the most recent annual "Price and Availability List" are no longer available. Prices of reports released to the open files are given in the listing "U.S. Geological Survey Open-File Reports," updated month ly, which is for sale in microfiche from the U.S. Geological Survey, Books and Open-File Reports Section, Federal Center, Box 25425, Denver, CO 80225. Reports released through the NTIS may be obtained by writing to the National Technical Information Service, U.S. Department of Commerce, Springfield, VA 22161; please include NTIS report number with inquiry. Order U.S. Geological Survey publications by mail or over the counter from the offices given below. BY MAIL OVER THE COUNTER Books Books Professional Papers, Bulletins, Water-Supply Papers, Techniques of Water-Resources Investigations, Circulars, publications of general in Books of the U.S. Geological Survey are available over the terest (such as leaflets, pamphlets, booklets), single copies of Earthquakes counter at the following Geological Survey Public Inquiries Offices, all & Volcanoes, Preliminary Determination of Epicenters, and some mis of which are authorized agents of the Superintendent of Documents: cellaneous reports, including some of the foregoing series that have gone out of print at the Superintendent of Documents, are obtainable by mail from • WASHINGTON, D.C.--Main Interior Bldg., 2600 corridor, 18th and C Sts., NW. -

Map Projections
Map Projections Chapter 4 Map Projections What is map projection? Why are map projections drawn? What are the different types of projections? Which projection is most suitably used for which area? In this chapter, we will seek the answers of such essential questions. MAP PROJECTION Map projection is the method of transferring the graticule of latitude and longitude on a plane surface. It can also be defined as the transformation of spherical network of parallels and meridians on a plane surface. As you know that, the earth on which we live in is not flat. It is geoid in shape like a sphere. A globe is the best model of the earth. Due to this property of the globe, the shape and sizes of the continents and oceans are accurately shown on it. It also shows the directions and distances very accurately. The globe is divided into various segments by the lines of latitude and longitude. The horizontal lines represent the parallels of latitude and the vertical lines represent the meridians of the longitude. The network of parallels and meridians is called graticule. This network facilitates drawing of maps. Drawing of the graticule on a flat surface is called projection. But a globe has many limitations. It is expensive. It can neither be carried everywhere easily nor can a minor detail be shown on it. Besides, on the globe the meridians are semi-circles and the parallels 35 are circles. When they are transferred on a plane surface, they become intersecting straight lines or curved lines. 2021-22 Practical Work in Geography NEED FOR MAP PROJECTION The need for a map projection mainly arises to have a detailed study of a 36 region, which is not possible to do from a globe. -

Portraying Earth
A map says to you, 'Read me carefully, follow me closely, doubt me not.' It says, 'I am the Earth in the palm of your hand. Without me, you are alone and lost.’ Beryl Markham (West With the Night, 1946 ) • Map Projections • Families of Projections • Computer Cartography Students often have trouble with geographic names and terms. If you need/want to know how to pronounce something, try this link. Audio Pronunciation Guide The site doesn’t list everything but it does have the words with which you’re most likely to have trouble. • Methods for representing part of the surface of the earth on a flat surface • Systematic representations of all or part of the three-dimensional Earth’s surface in a two- dimensional model • Transform spherical surfaces into flat maps. • Affect how maps are used. The problem: Imagine a large transparent globe with drawings. You carefully cover the globe with a sheet of paper. You turn on a light bulb at the center of the globe and trace all of the things drawn on the globe onto the paper. You carefully remove the paper and flatten it on the table. How likely is it that the flattened image will be an exact copy of the globe? The different map projections are the different methods geographers have used attempting to transform an image of the spherical surface of the Earth into flat maps with as little distortion as possible. No matter which map projection method you use, it is impossible to show the curved earth on a flat surface without some distortion. -
Maps and Cartography: Map Projections a Tutorial Created by the GIS Research & Map Collection
Maps and Cartography: Map Projections A Tutorial Created by the GIS Research & Map Collection Ball State University Libraries A destination for research, learning, and friends What is a map projection? Map makers attempt to transfer the earth—a round, spherical globe—to flat paper. Map projections are the different techniques used by cartographers for presenting a round globe on a flat surface. Angles, areas, directions, shapes, and distances can become distorted when transformed from a curved surface to a plane. Different projections have been designed where the distortion in one property is minimized, while other properties become more distorted. So map projections are chosen based on the purposes of the map. Keywords •azimuthal: projections with the property that all directions (azimuths) from a central point are accurate •conformal: projections where angles and small areas’ shapes are preserved accurately •equal area: projections where area is accurate •equidistant: projections where distance from a standard point or line is preserved; true to scale in all directions •oblique: slanting, not perpendicular or straight •rhumb lines: lines shown on a map as crossing all meridians at the same angle; paths of constant bearing •tangent: touching at a single point in relation to a curve or surface •transverse: at right angles to the earth’s axis Models of Map Projections There are two models for creating different map projections: projections by presentation of a metric property and projections created from different surfaces. • Projections by presentation of a metric property would include equidistant, conformal, gnomonic, equal area, and compromise projections. These projections account for area, shape, direction, bearing, distance, and scale. -
Representations of Celestial Coordinates in FITS
A&A 395, 1077–1122 (2002) Astronomy DOI: 10.1051/0004-6361:20021327 & c ESO 2002 Astrophysics Representations of celestial coordinates in FITS M. R. Calabretta1 and E. W. Greisen2 1 Australia Telescope National Facility, PO Box 76, Epping, NSW 1710, Australia 2 National Radio Astronomy Observatory, PO Box O, Socorro, NM 87801-0387, USA Received 24 July 2002 / Accepted 9 September 2002 Abstract. In Paper I, Greisen & Calabretta (2002) describe a generalized method for assigning physical coordinates to FITS image pixels. This paper implements this method for all spherical map projections likely to be of interest in astronomy. The new methods encompass existing informal FITS spherical coordinate conventions and translations from them are described. Detailed examples of header interpretation and construction are given. Key words. methods: data analysis – techniques: image processing – astronomical data bases: miscellaneous – astrometry 1. Introduction PIXEL p COORDINATES j This paper is the second in a series which establishes conven- linear transformation: CRPIXja r j tions by which world coordinates may be associated with FITS translation, rotation, PCi_ja mij (Hanisch et al. 2001) image, random groups, and table data. skewness, scale CDELTia si Paper I (Greisen & Calabretta 2002) lays the groundwork by developing general constructs and related FITS header key- PROJECTION PLANE x words and the rules for their usage in recording coordinate in- COORDINATES ( ,y) formation. In Paper III, Greisen et al. (2002) apply these meth- spherical CTYPEia (φ0,θ0) ods to spectral coordinates. Paper IV (Calabretta et al. 2002) projection PVi_ma Table 13 extends the formalism to deal with general distortions of the co- ordinate grid. -

Distortion-Free Wide-Angle Portraits on Camera Phones
Distortion-Free Wide-Angle Portraits on Camera Phones YICHANG SHIH, WEI-SHENG LAI, and CHIA-KAI LIANG, Google (a) A wide-angle photo with distortions on subjects’ faces. (b) Distortion-free photo by our method. Fig. 1. (a) A group selfie taken by a wide-angle 97° field-of-view phone camera. The perspective projection renders unnatural look to faces on the periphery: they are stretched, twisted, and squished. (b) Our algorithm restores all the distorted face shapes and keeps the background unaffected. Photographers take wide-angle shots to enjoy expanding views, group por- ACM Reference Format: traits that never miss anyone, or composite subjects with spectacular scenery background. In spite of the rapid proliferation of wide-angle cameras on YiChang Shih, Wei-Sheng Lai, and Chia-Kai Liang. 2019. Distortion-Free mobile phones, a wider field-of-view (FOV) introduces a stronger perspec- Wide-Angle Portraits on Camera Phones. ACM Trans. Graph. 38, 4, Article 61 tive distortion. Most notably, faces are stretched, squished, and skewed, to (July 2019), 12 pages. https://doi.org/10.1145/3306346.3322948 look vastly different from real-life. Correcting such distortions requires pro- fessional editing skills, as trivial manipulations can introduce other kinds of distortions. This paper introduces a new algorithm to undistort faces 1 INTRODUCTION without affecting other parts of the photo. Given a portrait as an input,we formulate an optimization problem to create a content-aware warping mesh Empowered with extra peripheral vi- FOV=97° which locally adapts to the stereographic projection on facial regions, and sion to “see”, a wide-angle lens is FOV=76° seamlessly evolves to the perspective projection over the background. -

Cylindrical Projections 27
MAP PROJECTION PROPERTIES: CONSIDERATIONS FOR SMALL-SCALE GIS APPLICATIONS by Eric M. Delmelle A project submitted to the Faculty of the Graduate School of State University of New York at Buffalo in partial fulfillments of the requirements for the degree of Master of Arts Geographical Information Systems and Computer Cartography Department of Geography May 2001 Master Advisory Committee: David M. Mark Douglas M. Flewelling Abstract Since Ptolemeus established that the Earth was round, the number of map projections has increased considerably. Cartographers have at present an impressive number of projections, but often lack a suitable classification and selection scheme for them, which significantly slows down the mapping process. Although a projection portrays a part of the Earth on a flat surface, projections generate distortion from the original shape. On world maps, continental areas may severely be distorted, increasingly away from the center of the projection. Over the years, map projections have been devised to preserve selected geometric properties (e.g. conformality, equivalence, and equidistance) and special properties (e.g. shape of the parallels and meridians, the representation of the Pole as a line or a point and the ratio of the axes). Unfortunately, Tissot proved that the perfect projection does not exist since it is not possible to combine all geometric properties together in a single projection. In the twentieth century however, cartographers have not given up their creativity, which has resulted in the appearance of new projections better matching specific needs. This paper will review how some of the most popular world projections may be suited for particular purposes and not for others, in order to enhance the message the map aims to communicate.