Representations of Celestial Coordinates in FITS
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Unusual Map Projections Tobler 1999
Unusual Map Projections Waldo Tobler Professor Emeritus Geography department University of California Santa Barbara, CA 93106-4060 http://www.geog.ucsb.edu/~tobler 1 Based on an invited presentation at the 1999 meeting of the Association of American Geographers in Hawaii. Copyright Waldo Tobler 2000 2 Subjects To Be Covered Partial List The earth’s surface Area cartograms Mercator’s projection Combined projections The earth on a globe Azimuthal enlargements Satellite tracking Special projections Mapping distances And some new ones 3 The Mapping Process Common Surfaces Used in cartography 4 The surface of the earth is two dimensional, which is why only (but also both) latitude and longitude are needed to pin down a location. Many authors refer to it as three dimensional. This is incorrect. All map projections preserve the two dimensionality of the surface. The Byte magazine cover from May 1979 shows how the graticule rides up and down over hill and dale. Yes, it is embedded in three dimensions, but the surface is a curved, closed, and bumpy, two dimensional surface. Map projections convert this to a flat two dimensional surface. 5 The Surface of the Earth Is Two-Dimensional 6 The easy way to demonstrate that Mercator’s projection cannot be obtained as a perspective transformation is to draw lines from the latitudes on the projection to their occurrence on a sphere, here represented by an adjoining circle. The rays will not intersect in a point. 7 Mercator’s Projection Is Not Perspective 8 It is sometimes asserted that one disadvantage of a globe is that one cannot see all of the entire earth at one time. -
Map Projections Paper 4 (Th.) UNIT : I ; TOPIC : 3 …Introduction
FOR SEMESTER 3 GE Students , Geography Map Projections Paper 4 (Th.) UNIT : I ; TOPIC : 3 …Introduction Prepared and Compiled By Dr. Rajashree Dasgupta Assistant Professor Dept. of Geography Government Girls’ General Degree College 3/23/2020 1 Map Projections … The method by which we transform the earth’s spheroid (real world) to a flat surface (abstraction), either on paper or digitally Define the spatial relationship between locations on earth and their relative locations on a flat map Think about projecting a see- through globe onto a wall Dept. of Geography, GGGDC, 3/23/2020 Kolkata 2 Spatial Reference = Datum + Projection + Coordinate system Two basic locational systems: geometric or Cartesian (x, y, z) and geographic or gravitational (f, l, z) Mean sea level surface or geoid is approximated by an ellipsoid to define an earth datum which gives (f, l) and distance above geoid gives (z) 3/23/2020 Dept. of Geography, GGGDC, Kolkata 3 3/23/2020 Dept. of Geography, GGGDC, Kolkata 4 Classifications of Map Projections Criteria Parameter Classes/ Subclasses Extrinsic Datum Direct / Double/ Spherical Triple Surface Spheroidal Plane or Ist Order 2nd Order 3rd Order surface of I. Planar a. Tangent i. Normal projection II. Conical b. Secant ii. Transverse III. Cylindric c. Polysuperficial iii. Oblique al Method of Perspective Semi-perspective Non- Convention Projection perspective al Intrinsic Properties Azimuthal Equidistant Othomorphic Homologra phic Appearance Both parallels and meridians straight of parallels Parallels straight, meridians curve and Parallels curves, meridians straight meridians Both parallels and meridians curves Parallels concentric circles , meridians radiating st. lines Parallels concentric circles, meridians curves Geometric Rectangular Circular Elliptical Parabolic Shape 3/23/2020 Dept. -
Polar Zenithal Map Projections
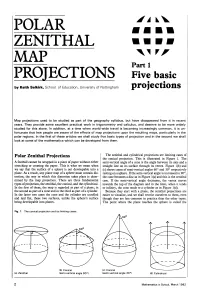
POLAR ZENITHAL MAP Part 1 PROJECTIONS Five basic by Keith Selkirk, School of Education, University of Nottingham projections Map projections used to be studied as part of the geography syllabus, but have disappeared from it in recent years. They provide some excellent practical work in trigonometry and calculus, and deserve to be more widely studied for this alone. In addition, at a time when world-wide travel is becoming increasingly common, it is un- fortunate that few people are aware of the effects of map projections upon the resulting maps, particularly in the polar regions. In the first of these articles we shall study five basic types of projection and in the second we shall look at some of the mathematics which can be developed from them. Polar Zenithal Projections The zenithal and cylindrical projections are limiting cases of the conical projection. This is illustrated in Figure 1. The A football cannot be wrapped in a piece of paper without either semi-vertical angle of a cone is the angle between its axis and a stretching or creasing the paper. This is what we mean when straight line on its surface through its vertex. Figure l(b) and we say that the surface of a sphere is not developable into a (c) shows cones of semi-vertical angles 600 and 300 respectively plane. As a result, any plane map of a sphere must contain dis- resting on a sphere. If the semi-vertical angle is increased to 900, tortion; the way in which this distortion takes place is deter- the cone becomes a disc as in Figure l(a) and this is the zenithal mined by the map projection. -

5–21 5.5 Miscellaneous Projections GMT Supports 6 Common
GMT TECHNICAL REFERENCE & COOKBOOK 5–21 5.5 Miscellaneous Projections GMT supports 6 common projections for global presentation of data or models. These are the Hammer, Mollweide, Winkel Tripel, Robinson, Eckert VI, and Sinusoidal projections. Due to the small scale used for global maps these projections all use the spherical approximation rather than more elaborate elliptical formulae. 5.5.1 Hammer Projection (–Jh or –JH) The equal-area Hammer projection, first presented by Ernst von Hammer in 1892, is also known as Hammer-Aitoff (the Aitoff projection looks similar, but is not equal-area). The border is an ellipse, equator and central meridian are straight lines, while other parallels and meridians are complex curves. The projection is defined by selecting • The central meridian • Scale along equator in inch/degree or 1:xxxxx (–Jh), or map width (–JH) A view of the Pacific ocean using the Dateline as central meridian is accomplished by running the command pscoast -R0/360/-90/90 -JH180/5 -Bg30/g15 -Dc -A10000 -G0 -P -X0.1 -Y0.1 > hammer.ps 5.5.2 Mollweide Projection (–Jw or –JW) This pseudo-cylindrical, equal-area projection was developed by Mollweide in 1805. Parallels are unequally spaced straight lines with the meridians being equally spaced elliptical arcs. The scale is only true along latitudes 40˚ 44' north and south. The projection is used mainly for global maps showing data distributions. It is occasionally referenced under the name homalographic projection. Like the Hammer projection, outlined above, we need to specify only -

Notes on Projections Part II - Common Projections James R
Notes on Projections Part II - Common Projections James R. Clynch 2003 I. Common Projections There are several areas where maps are commonly used and a few projections dominate these fields. An extensive list is given at the end of the Introduction Chapter in Snyder. Here just a few will be given. Whole World Mercator Most common world projection. Cylindrical Robinson Less distortion than Mercator. Pseudocylindrical Goode Interrupted map. Common for thematic maps. Navigation Charts UTM Common for ocean charts. Part of military map system. UPS For polar regions. Part of military map system. Lambert Lambert Conformal Conic standard in Air Navigation Charts Topographic Maps Polyconic US Geological Survey Standard. UTM coordinates on margins. Surveying / Land Use / General Adlers Equal Area (Conic) Transverse Mercator For areas mainly North-South Lambert For areas mainly East-West A discussion of these and a few others follows. For an extensive list see Snyder. The two maps that form the military grid reference system (MGRS) the UTM and UPS are discussed in detail in a separate note. II. Azimuthal or Planar Projections I you project a globe on a plane that is tangent or symmetric about the polar axis the azimuths to the center point are all true. This leads to the name Azimuthal for projections on a plane. There are 4 common projections that use a plane as the projection surface. Three are perspective. The fourth is the simple polar plot that has the official name equidistant azimuthal projection. The three perspective azimuthal projections are shown below. They differ in the location of the perspective or projection point. -

Comparison of Spherical Cube Map Projections Used in Planet-Sized Terrain Rendering
FACTA UNIVERSITATIS (NIS)ˇ Ser. Math. Inform. Vol. 31, No 2 (2016), 259–297 COMPARISON OF SPHERICAL CUBE MAP PROJECTIONS USED IN PLANET-SIZED TERRAIN RENDERING Aleksandar M. Dimitrijevi´c, Martin Lambers and Dejan D. Ranˇci´c Abstract. A wide variety of projections from a planet surface to a two-dimensional map are known, and the correct choice of a particular projection for a given application area depends on many factors. In the computer graphics domain, in particular in the field of planet rendering systems, the importance of that choice has been neglected so far and inadequate criteria have been used to select a projection. In this paper, we derive evaluation criteria, based on texture distortion, suitable for this application domain, and apply them to a comprehensive list of spherical cube map projections to demonstrate their properties. Keywords: Map projection, spherical cube, distortion, texturing, graphics 1. Introduction Map projections have been used for centuries to represent the curved surface of the Earth with a two-dimensional map. A wide variety of map projections have been proposed, each with different properties. Of particular interest are scale variations and angular distortions introduced by map projections – since the spheroidal surface is not developable, a projection onto a plane cannot be both conformal (angle- preserving) and equal-area (constant-scale) at the same time. These two properties are usually analyzed using Tissot’s indicatrix. An overview of map projections and an introduction to Tissot’s indicatrix are given by Snyder [24]. In computer graphics, a map projection is a central part of systems that render planets or similar celestial bodies: the surface properties (photos, digital elevation models, radar imagery, thermal measurements, etc.) are stored in a map hierarchy in different resolutions. -

A Bevy of Area Preserving Transforms for Map Projection Designers.Pdf
Cartography and Geographic Information Science ISSN: 1523-0406 (Print) 1545-0465 (Online) Journal homepage: http://www.tandfonline.com/loi/tcag20 A bevy of area-preserving transforms for map projection designers Daniel “daan” Strebe To cite this article: Daniel “daan” Strebe (2018): A bevy of area-preserving transforms for map projection designers, Cartography and Geographic Information Science, DOI: 10.1080/15230406.2018.1452632 To link to this article: https://doi.org/10.1080/15230406.2018.1452632 Published online: 05 Apr 2018. Submit your article to this journal View related articles View Crossmark data Full Terms & Conditions of access and use can be found at http://www.tandfonline.com/action/journalInformation?journalCode=tcag20 CARTOGRAPHY AND GEOGRAPHIC INFORMATION SCIENCE, 2018 https://doi.org/10.1080/15230406.2018.1452632 A bevy of area-preserving transforms for map projection designers Daniel “daan” Strebe Mapthematics LLC, Seattle, WA, USA ABSTRACT ARTICLE HISTORY Sometimes map projection designers need to create equal-area projections to best fill the Received 1 January 2018 projections’ purposes. However, unlike for conformal projections, few transformations have Accepted 12 March 2018 been described that can be applied to equal-area projections to develop new equal-area projec- KEYWORDS tions. Here, I survey area-preserving transformations, giving examples of their applications and Map projection; equal-area proposing an efficient way of deploying an equal-area system for raster-based Web mapping. projection; area-preserving Together, these transformations provide a toolbox for the map projection designer working in transformation; the area-preserving domain. area-preserving homotopy; Strebe 1995 projection 1. Introduction two categories: plane-to-plane transformations and “sphere-to-sphere” transformations – but in quotes It is easy to construct a new conformal projection: Find because the manifold need not be a sphere at all. -
Bibliography of Map Projections
AVAILABILITY OF BOOKS AND MAPS OF THE U.S. GEOlOGICAL SURVEY Instructions on ordering publications of the U.S. Geological Survey, along with prices of the last offerings, are given in the cur rent-year issues of the monthly catalog "New Publications of the U.S. Geological Survey." Prices of available U.S. Geological Sur vey publications released prior to the current year are listed in the most recent annual "Price and Availability List" Publications that are listed in various U.S. Geological Survey catalogs (see back inside cover) but not listed in the most recent annual "Price and Availability List" are no longer available. Prices of reports released to the open files are given in the listing "U.S. Geological Survey Open-File Reports," updated month ly, which is for sale in microfiche from the U.S. Geological Survey, Books and Open-File Reports Section, Federal Center, Box 25425, Denver, CO 80225. Reports released through the NTIS may be obtained by writing to the National Technical Information Service, U.S. Department of Commerce, Springfield, VA 22161; please include NTIS report number with inquiry. Order U.S. Geological Survey publications by mail or over the counter from the offices given below. BY MAIL OVER THE COUNTER Books Books Professional Papers, Bulletins, Water-Supply Papers, Techniques of Water-Resources Investigations, Circulars, publications of general in Books of the U.S. Geological Survey are available over the terest (such as leaflets, pamphlets, booklets), single copies of Earthquakes counter at the following Geological Survey Public Inquiries Offices, all & Volcanoes, Preliminary Determination of Epicenters, and some mis of which are authorized agents of the Superintendent of Documents: cellaneous reports, including some of the foregoing series that have gone out of print at the Superintendent of Documents, are obtainable by mail from • WASHINGTON, D.C.--Main Interior Bldg., 2600 corridor, 18th and C Sts., NW. -

Map Projections
Map Projections Chapter 4 Map Projections What is map projection? Why are map projections drawn? What are the different types of projections? Which projection is most suitably used for which area? In this chapter, we will seek the answers of such essential questions. MAP PROJECTION Map projection is the method of transferring the graticule of latitude and longitude on a plane surface. It can also be defined as the transformation of spherical network of parallels and meridians on a plane surface. As you know that, the earth on which we live in is not flat. It is geoid in shape like a sphere. A globe is the best model of the earth. Due to this property of the globe, the shape and sizes of the continents and oceans are accurately shown on it. It also shows the directions and distances very accurately. The globe is divided into various segments by the lines of latitude and longitude. The horizontal lines represent the parallels of latitude and the vertical lines represent the meridians of the longitude. The network of parallels and meridians is called graticule. This network facilitates drawing of maps. Drawing of the graticule on a flat surface is called projection. But a globe has many limitations. It is expensive. It can neither be carried everywhere easily nor can a minor detail be shown on it. Besides, on the globe the meridians are semi-circles and the parallels 35 are circles. When they are transferred on a plane surface, they become intersecting straight lines or curved lines. 2021-22 Practical Work in Geography NEED FOR MAP PROJECTION The need for a map projection mainly arises to have a detailed study of a 36 region, which is not possible to do from a globe. -
Estimation of an Unknown Cartographic Projection and Its Parameters from the Map
Estimation of an Unknown Cartographic Projection and its Parameters from the Map Faculty of Sciences, Charles University in Prague , Tel.: ++420-221-951-400 Abstract This article presents a new off-line method for the detection, analysis and estimation of an unknown carto- graphic projection and its parameters from a map. Several invariants are used to construct the objective function φ that describes the relationship between the 0D, 1D, and 2D entities on the analyzed and reference maps. It is min- imized using the Nelder-Mead downhill simplex algorithm. A simplified and computationally cheaper version of the objective function φ involving only 0D elements is also presented. The following parameters are estimated: a map projection type, a map projection aspect given by the meta pole K coordinates [ϕk,λk], a true parallel latitude ϕ0, central meridian longitude λ0, a map scale, and a map rotation. Before the analysis, incorrectly drawn elements on the map can be detected and removed using the IRLS. Also introduced is a new method for computing the L2 distance between the turning functions Θ1, Θ2 of the corresponding faces using dynamic programming. Our ap- proach may be used to improve early map georeferencing; it can also be utilized in studies of national cartographic heritage or land use applications. The results are presented both for real cartographic data, representing early maps from the David Rumsay Map Collection, and for the synthetic tests. Keywords: digital cartography, map projection, analysis, simplex method, optimization, Voronoi diagram, outliers detection, early maps, georeferencing, cartographic heritage, meta data, Marc 21, MapAnalyst. 1 Introduction the proposed solution, this step can be performed semi- automatically and with a higher degree of relevance us- ing our method. -

Juan De La Cosa's Projection
Page 1 Coordinates Series A, no. 9 Juan de la Cosa’s Projection: A Fresh Analysis of the Earliest Preserved Map of the Americas Persistent URL for citation: http://purl.oclc.org/coordinates/a9.htm Luis A. Robles Macias Date of Publication: May 24, 2010 Luis A. Robles Macías ([email protected]) is employed as an engineer at Total, a major energy group. He is currently pursuing a Masters degree in Information and Knowledge Management at the Universitat Oberta de Catalunya. Abstract: Previous cartographic studies of the 1500 map by Juan de La Cosa have found substantial and difficult-to- explain errors in latitude, especially for the Antilles and the Caribbean coast. In this study, a mathematical methodology is applied to identify the underlying cartographic projection of the Atlantic region of the map, and to evaluate its latitudinal and longitudinal accuracy. The results obtained show that La Cosa’s latitudes are in fact reasonably accurate between the English Channel and the Congo River for the Old World, and also between Cuba and the Amazon River for the New World. Other important findings are that scale is mathematically consistent across the whole Atlantic basin, and that the line labeled cancro on the map does not represent the Tropic of Cancer, as usually assumed, but the ecliptic. The underlying projection found for La Cosa’s map has a simple geometric interpretation and is relatively easy to compute, but has not been described in detail until now. It may have emerged involuntarily as a consequence of the mapmaking methods used by the map’s author, but the historical context of the chart suggests that it was probably the result of a deliberate choice by the cartographer. -

The Gnomonic Projection
Gnomonic Projections onto Various Polyhedra By Brian Stonelake Table of Contents Abstract ................................................................................................................................................... 3 The Gnomonic Projection .................................................................................................................. 4 The Polyhedra ....................................................................................................................................... 5 The Icosahedron ............................................................................................................................................. 5 The Dodecahedron ......................................................................................................................................... 5 Pentakis Dodecahedron ............................................................................................................................... 5 Modified Pentakis Dodecahedron ............................................................................................................. 6 Equilateral Pentakis Dodecahedron ........................................................................................................ 6 Triakis Icosahedron ....................................................................................................................................... 6 Modified Triakis Icosahedron ...................................................................................................................