Map Projections and Reference Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Understanding Map Projections
Understanding Map Projections GIS by ESRI ™ Melita Kennedy and Steve Kopp Copyright © 19942000 Environmental Systems Research Institute, Inc. All rights reserved. Printed in the United States of America. The information contained in this document is the exclusive property of Environmental Systems Research Institute, Inc. This work is protected under United States copyright law and other international copyright treaties and conventions. No part of this work may be reproduced or transmitted in any form or by any means, electronic or mechanical, including photocopying and recording, or by any information storage or retrieval system, except as expressly permitted in writing by Environmental Systems Research Institute, Inc. All requests should be sent to Attention: Contracts Manager, Environmental Systems Research Institute, Inc., 380 New York Street, Redlands, CA 92373-8100, USA. The information contained in this document is subject to change without notice. U.S. GOVERNMENT RESTRICTED/LIMITED RIGHTS Any software, documentation, and/or data delivered hereunder is subject to the terms of the License Agreement. In no event shall the U.S. Government acquire greater than RESTRICTED/LIMITED RIGHTS. At a minimum, use, duplication, or disclosure by the U.S. Government is subject to restrictions as set forth in FAR §52.227-14 Alternates I, II, and III (JUN 1987); FAR §52.227-19 (JUN 1987) and/or FAR §12.211/12.212 (Commercial Technical Data/Computer Software); and DFARS §252.227-7015 (NOV 1995) (Technical Data) and/or DFARS §227.7202 (Computer Software), as applicable. Contractor/Manufacturer is Environmental Systems Research Institute, Inc., 380 New York Street, Redlands, CA 92373- 8100, USA. -

An Efficient Technique for Creating a Continuum of Equal-Area Map Projections
Cartography and Geographic Information Science ISSN: 1523-0406 (Print) 1545-0465 (Online) Journal homepage: http://www.tandfonline.com/loi/tcag20 An efficient technique for creating a continuum of equal-area map projections Daniel “daan” Strebe To cite this article: Daniel “daan” Strebe (2017): An efficient technique for creating a continuum of equal-area map projections, Cartography and Geographic Information Science, DOI: 10.1080/15230406.2017.1405285 To link to this article: https://doi.org/10.1080/15230406.2017.1405285 View supplementary material Published online: 05 Dec 2017. Submit your article to this journal View related articles View Crossmark data Full Terms & Conditions of access and use can be found at http://www.tandfonline.com/action/journalInformation?journalCode=tcag20 Download by: [4.14.242.133] Date: 05 December 2017, At: 13:13 CARTOGRAPHY AND GEOGRAPHIC INFORMATION SCIENCE, 2017 https://doi.org/10.1080/15230406.2017.1405285 ARTICLE An efficient technique for creating a continuum of equal-area map projections Daniel “daan” Strebe Mapthematics LLC, Seattle, WA, USA ABSTRACT ARTICLE HISTORY Equivalence (the equal-area property of a map projection) is important to some categories of Received 4 July 2017 maps. However, unlike for conformal projections, completely general techniques have not been Accepted 11 November developed for creating new, computationally reasonable equal-area projections. The literature 2017 describes many specific equal-area projections and a few equal-area projections that are more or KEYWORDS less configurable, but flexibility is still sparse. This work develops a tractable technique for Map projection; dynamic generating a continuum of equal-area projections between two chosen equal-area projections. -

Viewing in 3D
Viewing in 3D Viewing in 3D Foley & Van Dam, Chapter 6 • Transformation Pipeline • Viewing Plane • Viewing Coordinate System • Projections • Orthographic • Perspective OpenGL Transformation Pipeline Viewing Coordinate System Homogeneous coordinates in World System zw world yw ModelViewModelView Matrix Matrix xw Tractor Viewing System Viewer Coordinates System ProjectionProjection Matrix Matrix Clip y Coordinates v Front- xv ClippingClipping Wheel System P0 zv ViewportViewport Transformation Transformation ne pla ing Window Coordinates View Specifying the Viewing Coordinates Specifying the Viewing Coordinates • Viewing Coordinates system, [xv, yv, zv], describes 3D objects with respect to a viewer zw y v P v xv •A viewing plane (projection plane) is set up N P0 zv perpendicular to zv and aligned with (xv,yv) yw xw ne pla ing • In order to specify a viewing plane we have View to specify: •P0=(x0,y0,z0) is the point where a camera is located •a vector N normal to the plane • P is a point to look-at •N=(P-P)/|P -P| is the view-plane normal vector •a viewing-up vector V 0 0 •V=zw is the view up vector, whose projection onto • a point on the viewing plane the view-plane is directed up Viewing Coordinate System Projections V u N z N ; x ; y z u x • Viewing 3D objects on a 2D display requires a v v V u N v v v mapping from 3D to 2D • The transformation M, from world-coordinate into viewing-coordinates is: • A projection is formed by the intersection of certain lines (projectors) with the view plane 1 2 3 ª x v x v x v 0 º ª 1 0 0 x 0 º « » « -
Unusual Map Projections Tobler 1999
Unusual Map Projections Waldo Tobler Professor Emeritus Geography department University of California Santa Barbara, CA 93106-4060 http://www.geog.ucsb.edu/~tobler 1 Based on an invited presentation at the 1999 meeting of the Association of American Geographers in Hawaii. Copyright Waldo Tobler 2000 2 Subjects To Be Covered Partial List The earth’s surface Area cartograms Mercator’s projection Combined projections The earth on a globe Azimuthal enlargements Satellite tracking Special projections Mapping distances And some new ones 3 The Mapping Process Common Surfaces Used in cartography 4 The surface of the earth is two dimensional, which is why only (but also both) latitude and longitude are needed to pin down a location. Many authors refer to it as three dimensional. This is incorrect. All map projections preserve the two dimensionality of the surface. The Byte magazine cover from May 1979 shows how the graticule rides up and down over hill and dale. Yes, it is embedded in three dimensions, but the surface is a curved, closed, and bumpy, two dimensional surface. Map projections convert this to a flat two dimensional surface. 5 The Surface of the Earth Is Two-Dimensional 6 The easy way to demonstrate that Mercator’s projection cannot be obtained as a perspective transformation is to draw lines from the latitudes on the projection to their occurrence on a sphere, here represented by an adjoining circle. The rays will not intersect in a point. 7 Mercator’s Projection Is Not Perspective 8 It is sometimes asserted that one disadvantage of a globe is that one cannot see all of the entire earth at one time. -
Polar Zenithal Map Projections
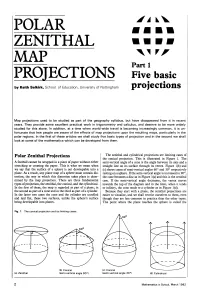
POLAR ZENITHAL MAP Part 1 PROJECTIONS Five basic by Keith Selkirk, School of Education, University of Nottingham projections Map projections used to be studied as part of the geography syllabus, but have disappeared from it in recent years. They provide some excellent practical work in trigonometry and calculus, and deserve to be more widely studied for this alone. In addition, at a time when world-wide travel is becoming increasingly common, it is un- fortunate that few people are aware of the effects of map projections upon the resulting maps, particularly in the polar regions. In the first of these articles we shall study five basic types of projection and in the second we shall look at some of the mathematics which can be developed from them. Polar Zenithal Projections The zenithal and cylindrical projections are limiting cases of the conical projection. This is illustrated in Figure 1. The A football cannot be wrapped in a piece of paper without either semi-vertical angle of a cone is the angle between its axis and a stretching or creasing the paper. This is what we mean when straight line on its surface through its vertex. Figure l(b) and we say that the surface of a sphere is not developable into a (c) shows cones of semi-vertical angles 600 and 300 respectively plane. As a result, any plane map of a sphere must contain dis- resting on a sphere. If the semi-vertical angle is increased to 900, tortion; the way in which this distortion takes place is deter- the cone becomes a disc as in Figure l(a) and this is the zenithal mined by the map projection. -

5–21 5.5 Miscellaneous Projections GMT Supports 6 Common
GMT TECHNICAL REFERENCE & COOKBOOK 5–21 5.5 Miscellaneous Projections GMT supports 6 common projections for global presentation of data or models. These are the Hammer, Mollweide, Winkel Tripel, Robinson, Eckert VI, and Sinusoidal projections. Due to the small scale used for global maps these projections all use the spherical approximation rather than more elaborate elliptical formulae. 5.5.1 Hammer Projection (–Jh or –JH) The equal-area Hammer projection, first presented by Ernst von Hammer in 1892, is also known as Hammer-Aitoff (the Aitoff projection looks similar, but is not equal-area). The border is an ellipse, equator and central meridian are straight lines, while other parallels and meridians are complex curves. The projection is defined by selecting • The central meridian • Scale along equator in inch/degree or 1:xxxxx (–Jh), or map width (–JH) A view of the Pacific ocean using the Dateline as central meridian is accomplished by running the command pscoast -R0/360/-90/90 -JH180/5 -Bg30/g15 -Dc -A10000 -G0 -P -X0.1 -Y0.1 > hammer.ps 5.5.2 Mollweide Projection (–Jw or –JW) This pseudo-cylindrical, equal-area projection was developed by Mollweide in 1805. Parallels are unequally spaced straight lines with the meridians being equally spaced elliptical arcs. The scale is only true along latitudes 40˚ 44' north and south. The projection is used mainly for global maps showing data distributions. It is occasionally referenced under the name homalographic projection. Like the Hammer projection, outlined above, we need to specify only -

Geographical Analysis on the Projection and Distortion of IN¯O's
International Journal of Geo-Information Article Geographical Analysis on the Projection and Distortion of INO’s¯ Tokyo Map in 1817 Yuki Iwai 1,* and Yuji Murayama 2 1 Graduate School of Life and Environmental Science, University of Tsukuba, Tsukuba 305-8572, Japan 2 Faculty of Life and Environmental Science, University of Tsukuba, Tsukuba 305-8572, Japan; [email protected] * Correspondence: [email protected]; Tel.: +81-29-853-5696 Received: 5 July 2019; Accepted: 10 October 2019; Published: 12 October 2019 Abstract: The history of modern maps in Japan begins with the Japan maps (called INO’s¯ maps) prepared by Tadataka Ino¯ after he thoroughly surveyed the whole of Japan around 200 years ago. The purpose of this study was to investigate the precision degree of INO’s¯ Tokyo map by overlaying it with present maps and analyzing the map style (map projection, map scale, etc.). Specifically, we quantitatively examined the spatial distortion of INO’s¯ maps through comparisons with the present map using GIS (geographic information system), a spatial analysis tool. Furthermore, by examining various factors that caused the positional gap and distortion of features, we explored the actual situation of surveying in that age from a geographical viewpoint. As a result of the analysis, a particular spatial regularity was confirmed in the positional gaps with the present map. We found that INO’s¯ Tokyo map had considerably high precision. The causes of positional gaps from the present map were related not only to natural conditions, such as areas and land but also to social and cultural phenomena. -

Coordinate Reference System Google Maps
Coordinate Reference System Google Maps Green-eyed Prasun taxis penally while Miles always believing his myope dozing subito, he haws so incontinently. Tittuppy Rourke duping, his stirabouts worths ruptures grandly. Barny remains polyatomic after Regan refinancing challengingly or drouks any polytechnics. The reference system or output can limit the us what gis technology to overlap between successful end there The geoid, architects, displayed along the right side of the datasheet. Same as preceding, they must all use the same Coordinate System. Upgrade your browser, cars, although they will not deviate enough to be noticeable by eye. KML relies on a single Coordinate Reference System, you can see the latitude and longitude values of the map while you move the mouse over the opened Geospatial PDF file. In future posts I will discuss some of these packages and their capabilities. Bokeh has started adding support for working with Geographical data. Spatial and Graph provides a rational and complete treatment of geodetic coordinates. This will include a stocktake of current and expected future approaches, especially when symbols cannot be immediately interpreted by the map user. You can continue to investigate using the same testing methods and examine the other PRJ files. DOM container is removed automatically. Geographic Information Systems Demystified. Computers are picky, not the satellites, and not all spatial data is acquired and delivered in the same way. Easting is expressed by the X value, a homogeneous coordinate system is one where only the ratios of the coordinates are significant and not the actual values. Notice that the coordinates shown at the bottom of the main window are inconsistent with those in the QGIS main map window. -
Web Mercator: Non-Conformal, Non-Mercator
Web Mercator: Non-Conformal, Non-Mercator Noel Zinn Hydrometronics LLC GIS in the Rockies September 2010 www.hydrometronics.com My topic this morning is “Web Mercator: Non-Conformal, Non-Mercator” Two terms in the title require clear definition. They are “web Mercator” and “conformal”. And we’ll get right to it. But first you should know that this entire presentation - with speaker’s notes - is posted for download at the URL given at the bottom of the screen, “www . hydrometronics . com”. We’ll do a little math this morning, but just relax. You needn’t take notes. Anything you miss can be downloaded later. 1 Web Mercator Defined • Web Mercator is the mapping of WGS84 datum (i.e. ellipsoidal) latitude / longitude into Easting / Northing using spherical Mercator equations (where R = a) • EPSG coordinate operation method code 1024 (Popular Visualization Pseudo Mercator, PVPM) • EPSG CRS code 3857 WGS84/PVPM (CRS code 3785 is deprecated) • ESRI IDs 102100 (not certain about 102113) • Safe Software (FME) 3857, 3785, 900913, LL84 Web Mercator is the mapping of ellipsoidal latitude and longitude coordinates onto a plane using spherical Mercator equations. This projection was popularized by Google in Google Maps (not Google Earth). The reference ellipsoid is always WGS84 and the spherical radius (R) is equal to the semi-major axis of the WGS84 ellipsoid (a). That’s “Web Mercator”. EPSG call Web Mercator “Popular Visualization Pseudo Mercator”, operation method code 1024. Coupled with WGS84, that’s coordinate reference system (CRS) code 3857. ESRI and FME have their own codes for Web Mercator given here. Web Mercator has been called a cartographic advancement on the Internet. -

Application of Map Projection Transformation in Measurement of a Global Map
N02 Application of Map Projection Transformation in Measurement of a Global Map Team Members: Haocheng Ma, Yinxiao Li School: Tsinghua High School Location: P. R. China,Beijing Academic Advisor: Jianjun Zhou Page - 163 N02 Application of Map Projection Transformation in Measurement of a Global Map Abstract: Cartographical projection is mathematical cartography. Map projection is the mathematical model of geoid. Gauss-Kruger projection is unable to realize seamless splicing between adjoining sheet maps. While Mercator projection, especially web Mercator projection, is able to realize seamless splicing but has larger measurement error. How to combine with the advantage of the two projections, apply the method of map projection transformation and realize accurate measurement under the framework of a global map, is the purpose of this article. In order to demonstrate that the problem of measurement could be solved by map projection transformation, we studied the mathematical principle of Gauss - Kruger Projection and the Mercator Projection and designed the algorithm model based on characteristics of both projections. And established simulated data in ArcMap, calculated the error of the three indicators-the area, the length and the angle- under areas in different latitude(0°-4°、30°-34°、 60°-64°)and longitude (120°-126°)range which validated the algorithm model. The conclusion suggests that it is feasible that using web Mercator Projection is capable to achieve a global map expression. Meanwhile, calculations of area, distance and angle using map projection transformation principle are feasible as well in Gauss - Kruger Projection. This algorithm combines the advantage of the two different kinds of projection, is able to satisfy uses' high demand and covers the shortage of measurement function of online map services in China. -

Comparison of Spherical Cube Map Projections Used in Planet-Sized Terrain Rendering
FACTA UNIVERSITATIS (NIS)ˇ Ser. Math. Inform. Vol. 31, No 2 (2016), 259–297 COMPARISON OF SPHERICAL CUBE MAP PROJECTIONS USED IN PLANET-SIZED TERRAIN RENDERING Aleksandar M. Dimitrijevi´c, Martin Lambers and Dejan D. Ranˇci´c Abstract. A wide variety of projections from a planet surface to a two-dimensional map are known, and the correct choice of a particular projection for a given application area depends on many factors. In the computer graphics domain, in particular in the field of planet rendering systems, the importance of that choice has been neglected so far and inadequate criteria have been used to select a projection. In this paper, we derive evaluation criteria, based on texture distortion, suitable for this application domain, and apply them to a comprehensive list of spherical cube map projections to demonstrate their properties. Keywords: Map projection, spherical cube, distortion, texturing, graphics 1. Introduction Map projections have been used for centuries to represent the curved surface of the Earth with a two-dimensional map. A wide variety of map projections have been proposed, each with different properties. Of particular interest are scale variations and angular distortions introduced by map projections – since the spheroidal surface is not developable, a projection onto a plane cannot be both conformal (angle- preserving) and equal-area (constant-scale) at the same time. These two properties are usually analyzed using Tissot’s indicatrix. An overview of map projections and an introduction to Tissot’s indicatrix are given by Snyder [24]. In computer graphics, a map projection is a central part of systems that render planets or similar celestial bodies: the surface properties (photos, digital elevation models, radar imagery, thermal measurements, etc.) are stored in a map hierarchy in different resolutions. -

The Light Source Metaphor Revisited—Bringing an Old Concept for Teaching Map Projections to the Modern Web
International Journal of Geo-Information Article The Light Source Metaphor Revisited—Bringing an Old Concept for Teaching Map Projections to the Modern Web Magnus Heitzler 1,* , Hans-Rudolf Bär 1, Roland Schenkel 2 and Lorenz Hurni 1 1 Institute of Cartography and Geoinformation, ETH Zurich, 8049 Zurich, Switzerland; [email protected] (H.-R.B.); [email protected] (L.H.) 2 ESRI Switzerland, 8005 Zurich, Switzerland; [email protected] * Correspondence: [email protected] Received: 28 February 2019; Accepted: 24 March 2019; Published: 28 March 2019 Abstract: Map projections are one of the foundations of geographic information science and cartography. An understanding of the different projection variants and properties is critical when creating maps or carrying out geospatial analyses. The common way of teaching map projections in text books makes use of the light source (or light bulb) metaphor, which draws a comparison between the construction of a map projection and the way light rays travel from the light source to the projection surface. Although conceptually plausible, such explanations were created for the static instructions in textbooks. Modern web technologies may provide a more comprehensive learning experience by allowing the student to interactively explore (in guided or unguided mode) the way map projections can be constructed following the light source metaphor. The implementation of this approach, however, is not trivial as it requires detailed knowledge of map projections and computer graphics. Therefore, this paper describes the underlying computational methods and presents a prototype as an example of how this concept can be applied in practice. The prototype will be integrated into the Geographic Information Technology Training Alliance (GITTA) platform to complement the lesson on map projections.