Uncertainty and Risk Analysis in Fire Safety Engineering Frantzich, Håkan
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Preacher Fire
Preacher Fire Fuels and Fire Behavior Resulting in an Entrapment July 24, 2017 Facilitated Learning Analysis (FLA) Photo Courtesy of BLM BLM Carson City District Office, Nevada Table of Contents Page Executive Summary ------------------------------------------------------------------------- 2 Methods ------------------------------------------------------------------------------------------ 2 Report Structure -------------------------------------------------------------------------------- 3 Conditions Affecting the Preacher Fire ------------------------------------------------- 3 Fuel Conditions --------------------------------------------------------------------------------------3 Fire Suppression Tactics -------------------------------------------------------------------------- 4 Weather Conditions -------------------------------------------------------------------------------- 4 Communication Challenges ----------------------------------------------------------------------- 4 Previous Fire History and Map ------------------------------------------------------------------- 4 The Story --------------------------------------------------------------------------------------- 5 Lessons Learned, Observations & Recommendations from Participants ---- 16 Fuel Conditions and Fire Behavior -------------------------------------------------------------- 16 Communications ---------------------------------------------------------------------------------- 17 Aviation -------------------------------------------------------------------------------------------- -

Escape Fire: Lessons for the Future of Health Care
Berwick Escape Fire lessons for the future oflessons for the future care health lessons for the future of health care Donald M. Berwick, md, mpp president and ceo institute for healthcare improvement ISBN 1-884533-00-0 the commonwealth fund Escape Fire lessons for the future of health care Donald M. Berwick, md, mpp president and ceo institute for healthcare improvement the commonwealth fund new york, new york The site of the Mann Gulch fire, which is described in this book, is listed introduction in the National Register of Historic Places. Because many regard it as sacred ground, it is actively protected and managed by the Forest Service as a cultural landscape. On December 9, 1999, the nearly 3,000 individuals who attended the 11th Annual National Forum on Quality Improvement in Health Care heard an extraordinary address by Dr. Donald M. Berwick, the founder, president, and CEO of the Institute for Healthcare Improvement, the forum’s sponsor. Entitled Escape Fire, Dr. Berwick’s speech took its audience back to the year 1949, when a wildfire broke out on a Montana hillside, taking the lives of 13 young men and changing the way firefighting was managed in the United States. After retelling this harrowing tale, Dr. Berwick applied the Escape Fire is an edited version of the Plenary Address delivered at the Institute for Healthcare Improvement’s 11th Annual National Forum lessons learned from this catastrophe to the health care on Quality Improvement in Health Care, in New Orleans, Louisiana, on December 9, 1999. system—a system that, he believes, is on the verge of its Copyright © 2002 Donald M. -

READY, SET, GO! Montana Your Personal Wildland Fire Action Guide
READY, SET, GO! Montana Your Personal Wildland Fire Action Guide READY, SET, GO! Montana Wildland Fire Action Guide Saving Lives and Property through Advanced Planning ire season is now a year-round reality in many areas, requiring firefighters and residents to be on heightened alert for the threat of F wildland fire. This plan is designed to help you get ready, get set, and INSIDE go when a wildland fire approaches. Civilian deaths occur because people wait too long to leave their home. Each year, wildland fires consume hundreds of homes in the Wildland-Urban Living in the Wildland-Urban Interface 3 Interface (WUI). Studies show that as many as 80 percent of the homes lost to wildland fires could have been saved if their owners had only followed a few simple fire-safe practices. Give Your Home a Chance 4 Montana wildland firefighting agencies and your local fire department take every precaution to help protect you and your property from wildland fire. Making a Hardened Home 5 However, the reality is that in a major wildland fire event, there will simply not be enough fire resources or firefighters to defend every home. Successfully preparing for a wildland fire enables you to take personal Tour a Wildland Fire Ready Home 6-7 responsibility for protecting yourself, your family and your property. In this Ready, Set, Go! Action Guide, our goal is to provide you with the tips and tools you need to prepare for a wildland fire threat, to have situational awareness Ready – Preparing for the Fire Threat 8 when a fire starts, and to leave early when a wildland fire threatens, even if you have not received a warning. -

Appendix E: Sample Burn Plan Refuge Or Station: San Francisco Bay NWR Complex Unit
Appendix E: Sample Burn Plan Refuge or Station: San Francisco Bay NWR Complex Unit : Antioch Dunes NWR 11646 Date: Prepared By: Date: Roger P. Wong Prescribed Fire Burn Boss Reviewed By: Date: ADR Assistant Refuge Manager The approved Prescribed Fire Plan constitutes the authority to burn, pending approval of Section 7 Consultations, Environmental Assessments, or other required documents. No one has the authority to burn without an approved plan or in a manner not in compliance with the approved plan. Prescribed burning conditions established in the plan are firm limits. Actions taken in compliance with the approved Prescribed Fire Plan will be fully supported, but personnel will be held accountable for actions taken which are not in compliance with the approved plan. Approved By: Date: Margaret Kolar Project Leader San Francisco Bay/Don Edwards NWR 85 PRESCRIBED FIRE PLAN Refuge: San Francisco Bay NWR Complex Refuge Burn Number: Sub Station: Antioch Dunes NWR Fire Number: Name of Areas: Stamm Unit Total Acres To Be Burned: 11 acres divided into 2 units to be burned over one day Legal Description: Stamm Unit T.2N; R.2E, Section 18 Lat. 38 01', Long. 121 48' Is a Section 7 Consultation being forwarded to Fish and Wildlife Enhancement for review? Yes No (circle). Biological Opinion dated June 11, 1997 (Page 2 of this PFP should be a refuge base map showing the location of the burn on Fish and Wildlife Service land.) The Prescribed Fire Burn Boss/Specialist must participate in the development of this plan. I. GENERAL DESCRIPTION OF BURN UNIT Physical Features and Vegetation Cover Types Burn Unit 1B -- Stamm Unit - Hardpan (4 acres): Predominantly annual grasses interspersed with YST and bush lupin “skeletons” from previous year’s prescribed burn. -

Fire Management Leadership Fire Management Leadership
Fire today ManagementVolume 60 • No. 2 • Spring 2000 FIREIRE MANAGEMENT LEADERSHIPEADERSHIP United States Department of Agriculture Forest Service Through the Flames © Paco Young, 1999. Artwork courtesy of the artist and art print publisher Mill Pond Press, Venice, FL. For additional infor mation, please call 1-800-237-2233. Fire Management Today is published by the Forest Service of the U.S. Department of Agriculture, Washington, DC. The Secretary of Agriculture has determined that the publication of this periodical is necessary in the transaction of the public business required by law of this Department. Subscriptions ($13.00 per year domestic, $16.25 per year foreign) may be obtained from New Orders, Superintendent of Documents, P.O. Box 371954, Pittsburgh, PA 15250-7954. A subscription order form is available on the back cover. Fire Management Today is available on the World Wide Web at <http://www.fs.fed.us/fire/planning/firenote.htm>. Dan Glickman, Secretary April J. Baily U.S. Department of Agriculture General Manager Mike Dombeck, Chief Robert H. “Hutch” Brown, Ph.D. Forest Service Editor José Cruz, Director Fire and Aviation Management The U.S. Department of Agriculture (USDA) prohibits discrimination in all its programs and activities on the basis of race, color, national origin, gender, religion, age, disability, political beliefs, sexual orientation, or marital or family status. (Not all prohibited bases apply to all programs.) Persons with disabilities who require alternative means for communication of program information (Braille, large print, audiotape, etc.) should contact USDA’s TARGET Center at (202) 720-2600 (voice and TDD). To file a complaint of discrimination, write USDA, Director, Office of Civil Rights, Room 326-W, Whitten Building, 1400 Independence Avenue, SW, Washington, DC 20250-9410 or call (202) 720-5964 (voice and TDD). -

Prescribed Fire Lessons Learned
Prescribed Fire Lessons Learned Escape Prescribed Fire Reviews and Near Miss Incidents Initial Impression Report June 29, 2005 Prepared by Deirdre M. Dether Submitted to Wildland Fire Lessons Learned Center Summary of Escaped Prescribed Fire Reviews and Near Miss Incidents What key lessons have been learned and what knowledge gaps exist? Introduction This analysis is the first known attempt to take a comprehensive look at escaped prescribed fire reviews and near misses. A total of 30 prescribed fire escape reviews and ‘near misses’ (see Appendix A and B) were analyzed to discover what, if any reoccurring lessons were being learned, or whether they were indicating emerging knowledge gaps or trends. It is estimated that Federal land management agencies complete between 4,000 and 5,000 prescribed fires annually. Approximately ninetynine percent of those burns were ‘successful’ (in that they did not report escapes or near misses). This can be viewed as an excellent record, especially given the elements of risk and uncertainty associated with prescribed fire. However, that leaves 40 to 50 events annually we should learn from. This report is intended to assist in that effort. Evaluating formal reviews and After Action Reviews (AAR) can be a tool for burn personnel to expand their knowledge and supplement their own direct experiences. When reviews go beyond policy and accountability questions they can provide information that can add to our own direct experiences by broadening exposure to what can occur. Learning from other experiences may help avoid undesired outcomes. The intent of this report is not to point out ‘wrong decisions’, but rather it is to use all these individual ‘events’ to see if there are common themes and/or ‘weak signals’ occurring with these escapes and near miss events. -

Fire Occurrence Reporting System – User’S Guide 2007
BIA-FORS-Users-Guide-All_2007.doc Last update: 05/07/2007 SDL Bureau of Indian Affairs Fire Occurrence Reporting System – User’s Guide 2007 TABLE OF CONTENTS WHAT’S NEW.................................................................................................................................................3 GENERAL INFORMATION FOR FIRE OCCURRENCE REPORTING ..............................................5 HISTORY OF FIRE REPORTING IN BIA .................................................................................................8 INCIDENT TYPE DEFINITIONS AND REQUIREMENTS.....................................................................9 INSTRUCTIONS FOR THE DI-1202-BIA INDIVIDUAL FIRE REPORT ...........................................12 GENERAL REPORTING INFORMATION FIELDS .............................................................................................. 12 STATISTICAL DATA FIELDS................................................................................................................................ 15 LOCATION DATA FIELDS..................................................................................................................................... 17 FIRE MANAGEMENT FIELDS............................................................................................................................... 23 SITE DATA FIELDS................................................................................................................................................. 26 FIRE ECOLOGY FIELDS ....................................................................................................................................... -

Fireterminology.Pdf
Abandonment: Abandonment occurs when an emergency responder begins treatment of a patient and the leaves the patient or discontinues treatment prior to arrival of an equally or higher trained responder. Abrasion: A scrape or brush of the skin usually making it reddish in color and resulting in minor capillary bleeding. Absolute Pressure: The measurement of pressure, including atmospheric pressure. Measured in pound per square inch absolute. Absorption: A defensive method of controlling a spill by applying a material that absorbs the spilled material. Accelerant: Flammable fuel (often liquid) used by some arsonists to increase size or intensity of fire. Accelerator: A device to speed the operation of the dry sprinkler valve by detecting the decrease in air pressure resulting in acceleration of water flow to sprinkler heads. Accountability: The process of emergency responders (fire, police, emergency medical, etc...) checking in as being on-scene during an incident to an incident commander or accountability officer. Through the accountability system, each person is tracked throughout the incident until released from the scene by the incident commander or accountability officer. This is becoming a standard in the emergency services arena primarily for the safety of emergency personnel. Adapter: A device that adapts or changes one type of hose thread, type or size to another. It allows for connection of hoses and pipes of incompatible diameter, thread, or gender. May contain combinations, such as a double-female reducer. Adapters between multiple hoses are called wye, Siamese, or distributor. Administrative Warrant: An order issued by a magistrate that grants authority for fire personnel to enter private property for the purpose of conducting a fire prevention inspection or similar purpose. -
How Big Was Dodge's Escape Fire?
earlier. That such dire circumstanc- Acknowledgement Riebau, A.R.; Fox, D.G. 1999. Technically es have not occurred as yet, in our Advanced Smoke Estimation Tools The authors wish to thank the Joint (TASET): Needs Assessment and estimation, demonstrates the use- Fire Science Program for its finan- Feasibility Investigation. Joint Fire fulness of past smoke science, mod- Science Program. Washington, DC: cial and intellectual support of this eling and models, collegial relations USDA Forest Service, Wildlife, Fisheries, work under the JFSP project num- Watershed, and Air Research. 80 p. between all parties, and continuing ber 10-C-01-01. The Society of Research Administrators thoughtful attention to the issue. International (SRA). 2007. Joint Fire Science Program Smoke Management References and Air Quality Roundtables Research More information on the ques- Needs Assessment. Internal Joint Fire tionnaire and its results may be Bytnerowicz, A.; Arbaugh, M.J.; Anderson, Science Program Document. 18 pps. C.; Riebau, A.R. 2009. Integrating fire Thompson, G. P.; Pouliot, G. 2007. Wildland downloaded at <http://www.nine- research and air quality: Needs and rec- pointsouth.com.au>. Readers are Fire in the National Emissions Inventory: ommendations. In: Wildland Fires and Past Present and Future. Slide presenta- reminded that the questionnaire Air Pollution. Oxford, United Kingdom: tion. Available online at: <http://weather. was not a scientifically designed Elsevier. Developments in Environmental msfc.nasa.gov/conference/aq_presen- Science, Vol. 8: 585–602. survey and should approach its tations/Day%202%20afternoon%20 Riebau, A.R.; Fox, D. 2001. The new smoke pdf/Wildland_Fire_EI_PPF_NASA_ results with that understanding. management. International Journal of AQTeam_2007_TGP.pdf> (accessed June Wildland Fire. -

Mann Gulch Fire: a Forest Service Intermountain Race That Couldn’T Research Station General Technical Report INT-299 Be Won May 1993 Richard C
United States Department of Agriculture Mann Gulch Fire: A Forest Service Intermountain Race That Couldn’t Research Station General Technical Report INT-299 Be Won May 1993 Richard C. Rothermel THE AUTHOR work unit from 1966 until 1979 and was project leader of the Fire Behavior research work unit until 1992. RICHARD C. ROTHERMEL is a research physical sci- entist stationed at the Intermountain Fire Sciences Labo- RESEARCH SUMMARY ratory in Missoula, MT. Rothermel received his B.S. degree in aeronautical engineering at the University of The Mann Gulch fire, which overran 16 firefighters Washington in 1953. He served in the U.S. Air Force in 1949, is analyzed to show its probable movement as a special weapons aircraft development officer from with respect to the crew. The firefighters were smoke- 1953 to 1955. Upon his discharge he was employed at jumpers who had parachuted near the fire on August 5, Douglas Aircraft as a designer and troubleshooter in 1949. While they were moving to a safer location, the the armament group. From 1957 to 1961 Rothermel fire blocked their route. Three survived, the foreman was employed by the General Electric Co. in the aircraft who ignited an escape fire into which he tried to move nuclear propulsion department at the National Reactor his crew, and two firefighters who found a route to safety. Testing Station in Idaho. In 1961 Rothermel joined the Considerable controversy has centered around the Intermountain Fire Sciences Laboratory (formerly the probable behavior of the fire and the actions of the crew Northern Forest Fire Laboratory), where he has been members and their foreman. -

Crew Cohesion, Wildland Fire Transition
United States Department of Agriculture CrewCrew Cohesion,Cohesion, Forest Service Technology & WildlandWildland FFireire Transition,Transition, Development Program 5100 Fire andand FatalitiesFatalities February 2002 0251-2809-MTDC Jon Driessen, Ph.D. Sociologist USDA Forest Service Technology and Development Program Missoula, MT TE02P16—Fire and Aviation Management Technical Services February 2002 The Forest Service, United States Department of Agriculture (USDA), has developed this information for the guidance of its employees, its contractors, and its cooperating Federal and State agencies, and is not responsible for the interpretation or use of this information by anyone except its own employees. The use of trade, firm, or corporation names in this document is for the information and convenience of the reader, and does not constitute an endorsement by the Department of any product or service to the exclusion of others that may be suitable. The U.S. Department of Agriculture (USDA) prohibits discrimination in all its programs and activities on the basis of race, color, national origin, sex, religion, age, disability, political beliefs, sexual orientation, or marital or family status. (Not all prohibited bases apply to all programs.) Persons with disabilities who require alternative means for communication of program information (Braille, large print, audiotape, etc.) should contact USDA’s TARGET Center at (202) 720-2600 (voice and TDD). To file a complaint of discrimination, write USDA, Director, Office of Civil Rights, Room 326-W, -
Case Study Do Not Necessarily Represent Those of the Continual Vigilance, Team Training, Operational Process Agency
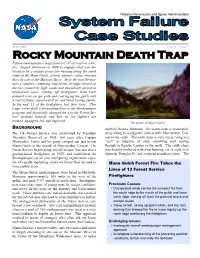
National Aeronautics and Space Administration JULY 2007 Volume 1 Issue 7 Rocky Mountain Death Trap Fifteen smokejumpers leapt from a C-47 aircraft on a hot, dry August afternoon in 1949 to engage what was be- lieved to be a routine forest fire burning along the south ridge of the Mann Gulch, a steep, narrow, valley, situated directly east of the Missouri River. Over the next 90 min- utes a complex, confusing, and heroic struggle ensued as the fire, fanned by high winds and downdrafts spread in unexpected ways, cutting off firefighters from their planned river escape path and roaring up the gulch with a wall of flame, superheated air and black boiling smoke. In the end, 13 of the firefighters lost their lives. This tragic event dealt a devastating blow to the Smokejumper program and drastically changed the way the Forest Ser- vice analyzes hazards and how its fire fighters are trained, equipped, led, and deployed. The mouth of Mann Gulch. BACKGROUND north of Helena, Montana. The south slope is moderately The US Forrest Service was established by President steep rising to a ridgeline shared with Merriwether Can- Theodore Roosevelt in 1905, 100 years after Captain yon to the south. The north slope is very steep, rising to a Meriwether Lewis and his party camped out just below “reef” or ridgeline of often crumbling rock cutting Mann Gulch at the mouth of Merriwether Canyon. The through to Rescue Canyon to the north. The south slope Forest Service began using aircraft to spot fires and direct was heavily timbered with slow burning, six to eight inch ground-based firefighters in 1925, and established the diameter Douglas fir and scattered ponderosa pine.