Comparative Study of Surface Roughness and Cylindricity of Aluminium Silicon Nitride Material Using MRA GMDH & Pattern Recognition Technique in Drilling
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
8.10 Drill Grinding Device
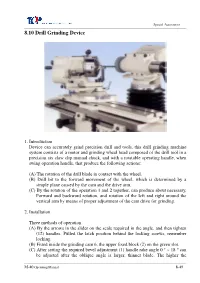
Special Accessories 8.10 Drill Grinding Device 1. Introduction Device can accurately grind precision drill and tools, this drill grinding machine system consists of a motor and grinding wheel head composed of the drill tool in a precision six claw clip manual chuck, and with a rotatable operating handle, when swing operation handle, that produce the following actions: (A) The rotation of the drill blade in contact with the wheel. (B) Drill bit to the forward movement of the wheel, which is determined by a simple plane caused by the cam and the drive arm. (C) By the rotation of the operation 1 and 2 together, can produce about necessary, Forward and backward rotation, and rotation of the left and right around the vertical arm by means of proper adjustment of the cam drive for grinding. 2. Installation Three methods of operation (A) By the arrows in the slider on the scale required in the angle, and then tighten (12) handles. Pulled the latch position behind the locking screws, remember locking. (B) Fitted inside the grinding cam 6, the upper fixed block (2) on the green slot. (C) After setting the required bevel adjustment (1) handle rake angle 0 ° ~ 18 ° can be adjusted after the oblique angle is larger, thinner blade. The higher the M-40 Operating Manual 8-49 Special Accessories hardness of the material to be cut, then the posterior oblique angle should be smaller; lower the hardness of the material to be cut, then the posterior oblique angle should be larger. (D) If a straight shank drill bit, then caught in six claw clip directly to the head; such as slope handle, is mounted on the right sleeve of Mohs, and then to six claw tip drill chuck clamping, which can center of the drill grinding more solid and more accurate. -

IBS, INCORPORATED T a P S B U R S B L a D E S Index
IBS, INCORPORATED Index 4-40 thru 1/2-10 Tap, Die & Drill Set PT-8 Taps, Burs & Blades 9/16-12 thru 3/4-16 Tap, Die & Drill Set PT-8 A Index 10 Pc NC/NF Power Taps w/Index PT-5, PT-7 10 Pc NC/NF Taper Taps w/Inde PT-5, PT-7 Annular Cutters 18 Pc NC Bottom Taps & Drill Bits w/Index PT-5, PT-7 Carbide Tipped 18 Pc NC Taper Taps & Drill Bits w/Index PT-5, PT-7 CT150 & CT200 PT-14, PT-16 Nitro-Carb Hand Tap PT-5, PT-7 IBS High Speed Steel PT-16 Assortments, Cutting Tools B Advanced Edge Power Reciprocating Saw Blades T Blades with Tool Ease Lubricant Stick PT-45 100 PK Shark Serrated Blades PT-54 Annular Cutters - Carbide Tipped Bandsaw, Bi-Metal A PT-15 General Information PT-36 Annular Cutters - High Speed Steel PT-17 Portable Blades PT-41 P Black Hole Carbide Tipped Cutters Troubleshooting PT-37, PT-38, PT-39, PT-40 1" Depth - 4 Pc.Set PT-23 Bi-Metal 1" Depth - 5 Pcs PT-23 Air Saw Blades PT-51 S 3/16" Depth - 5 Pc. PT-23 Reciprocating Saw PT-46 762R - 5 Pc. - 3/16" Depth PT-22 Boar Blades PT-48 763R - 4 Pc. 1" Depth PT-22 Thick Demolition PT-47 764R - 5 Pc. - 1" Depth PT-23 Sabre/Jig PT-52 Carbide Burs PT-59 Chop Saw-Carbide Tipped B Hole Saws 14" Blade for Aluminum PT-34 Bi-Metal 14" Blade for Stainless Steel PT-34 U Advanced Bi-Metal Hole Saws 2-1/8"- 4" PT-27 14" Blade for Steel PT-34 Advanced Bi-Metal Hole Saws 3/4"- 4" PT-28 Circular Saw Advanced Bi-Metal Hole Saws 5/8"- 2" PT-29 Combination Blade PT-32 R M42 Thin Wall Hole Saws Travel Tray Assortment PT-18 Heavy Duty Deck / Nail Cutting Blade PT-32 Hole Saws - Bi-Metal Miter Saw -

MODEL G0686 LARGE DRILL BIT GRINDER OWNER's MANUAL (For Models Manufactured Since 01/15)
MODEL G0686 LARGE DRILL BIT GRINDER OWNER'S MANUAL (For models manufactured since 01/15) COPYRIGHT © MAY, 2009 BY GRIZZLY INDUSTRIAL, INC., REVISED MARCH, 2019 (MN) WARNING: NO PORTION OF THIS MANUAL MAY BE REPRODUCED IN ANY SHAPE OR FORM WITHOUT THE WRITTEN APPROVAL OF GRIZZLY INDUSTRIAL, INC. #TS11442 PRINTED IN TAIWAN V2.03.19 This manual provides critical safety instructions on the proper setup, operation, maintenance, and service of this machine/tool. Save this document, refer to it often, and use it to instruct other operators. Failure to read, understand and follow the instructions in this manual may result in fire or serious personal injury—including amputation, electrocution, or death. The owner of this machine/tool is solely responsible for its safe use. This responsibility includes but is not limited to proper installation in a safe environment, personnel training and usage authorization, proper inspection and maintenance, manual availability and compre- hension, application of safety devices, cutting/sanding/grinding tool integrity, and the usage of personal protective equipment. The manufacturer will not be held liable for injury or property damage from negligence, improper training, machine modifications or misuse. Some dust created by power sanding, sawing, grinding, drilling, and other construction activities contains chemicals known to the State of California to cause cancer, birth defects or other reproductive harm. Some examples of these chemicals are: • Lead from lead-based paints. • Crystalline silica from bricks, cement and other masonry products. • Arsenic and chromium from chemically-treated lumber. Your risk from these exposures varies, depending on how often you do this type of work. -

Metal Drill Bits Hammer Drill Stronger Than Steel Chisel Drill Bits Stone and Special Metal Drill Bits
BITS METAL DRILL BITS HAMMER DRILL STRONGER THAN STEEL CHISEL DRILL BITS STONE AND SPECIAL METAL DRILL BITS 307 | HSS-E DIN 338 cobalt 76–79 WOOD DRILL BITS 311 | HSS TIN DIN 338 steel drill bit 80–81 302 | HSS DIN 338, ground, split point 82–85 300 | HSS DIN 338, standard 86–90 300 | HSS DIN 338, standard, shank reduced 91 340 | HSS DIN 340, ground, split point, long 92 342 | HSS DIN 1869, ground, extra long 93 SAWS 344 | HSS hollow section drill bit / Facade drill bit 94 345 | HSS DIN 345 morse taper 95–96 303 | HSS DIN 1897 pilot drill bit, ground, split point, extra short 97 310 | HSS DIN 8037 carbide tipped 98 312 | HSS-G Speeder DIN 338 RN metal drill bit 99 304 | HSS Double end drill bit, ground, split point 100 315 | HSS Drill bit KEILBIT, ground 101 317 | HSS combination tool KEILBIT 102 329 | HSS countersink KEILBIT 103 327 | HSS countersink 90° DIN 335 C 104 328 | HSS deburring countersink 105 ASSORTMENTS 326 | HSS tube and sheet drill bit 106 325 | HSS step drill 107 140 | Scriber 108 320 | HSS hole saw bi-metal 109–112 SHELVES | From Pros for Pros | www.keil.eu | 73 MODULES - BITS HAMMER DRILL METAL DRILL BITS Nothing stops the metal drill bits because we offer a drill bit for every application. CHISEL HSS-E TWIST DRILL BIT 135° The HSS-E drill bit is a cobalt alloyed high performance drill bit. Even with insufficient cooling it has reserve in heat resistance. Due to the alloying addition of 5 % Co in the cutting material these drill bits can be used for working with work pieces with a tensile strength of over 800N/m². -

Hole Saw and Mandrel Assembly
Europaisches Patentamt 19 J) European Patent Office Office europeen des brevets (Tj) Publication number : 0 455 420 A2 12 EUROPEAN PATENT APPLICATION (2?) Application number : 91303751.1 (a) Int. CI.5 : B23B 51/04 (2) Date of filing : 25.04.91 (So) Priority : 04.05.90 US 532527 (72) Inventor : Cain, William 100 Brookside Road Orange, Massachusetts 01364 (US) (43) Date of publication of application : Inventor : Emond, Ernest 06.11.91 Bulletin 91/45 28 River Road Millers Falls, Massachusetts 01349 (US) Karl @ Designated Contracting States : Inventor : Glawischnig, DE FR GB IT SE 98 Shelburne Center Road Shelburne Falls, Massachusetts 01370 (US) Inventor : Grant, Robert @ Applicant : RULE INDUSTRIES, INC. 31 Columbian Avenue 70 Blanchard Road Athol, Massachusetts 01331 (US) Burlington, MA 01803 (US) @) Representative : Woodward, John Calvin et al VENNER SHIPLEY & CO. 368 City Road London EC1V 2 OA (GB) (54) Hole saw and mandrel assembly. (57) A one piece hole saw assembly with mandrel permanently affixed to the hole saw cup. The mandrel contains a hollow shaft, a locking flange and reinforcing flange which are integ- rally formed as by machining. The locking flange of the mandrel mates with a locking hole or slot in the top surface of the hole saw cup. The reinforcing flange on the mandrel is welded during manufacture to the top surface of the hole saw cup. A pilot drill bit is inserted into the shaft core and welded to the shaft. The resulting product is a one piece hole saw assembly inten- ded for use by simple insertion of the mandrel or shaft end of the pilot drill into the chuck of a conventional electric drill. -

The MG Chemicals Professional Prototyping Process
The MG Chemicals Professional Prototyping Process Introduction ..................................................................................................................................................................3 Before you begin ..........................................................................................................................................................4 Read the instructions in their entirety.......................................................................................................................4 Get everything you need...........................................................................................................................................4 Plan for safety...........................................................................................................................................................5 Plan for disposal .......................................................................................................................................................5 Design your circuit for the MG process ...................................................................................................................6 Step 1: Cutting and Routing .........................................................................................................................................6 Ingredients required..................................................................................................................................................6 Overview: -

Investigation of Nondestructive Testing Methods for Friction Stir Welding
metals Review Investigation of Nondestructive Testing Methods for Friction Stir Welding Hossein Taheri 1,* , Margaret Kilpatrick 2, Matthew Norvalls 3, Warren J. Harper 3, Lucas W. Koester 4, Timothy Bigelow 3,4 and Leonard J. Bond 3,5 1 Department of Manufacturing Engineering, Georgia Southern University, Statesboro, GA 30460, USA 2 Department of Mechanical Engineering, Georgia Southern University, Statesboro, GA 30460, USA; [email protected] 3 Department of Mechanical Engineering, Iowa State University, Ames, IA 50011, USA; [email protected] (M.N.); [email protected] (W.J.H.); [email protected] (T.B.); [email protected] (L.J.B.) 4 Center for Nondestructive Evaluation (CNDE), Iowa State University, Ames, IA 50011, USA; [email protected] 5 Department of Aerospace Engineering, Iowa State University, Ames, IA 50011, USA * Correspondence: [email protected]; Tel.: +1-912-478-7463 Received: 15 April 2019; Accepted: 23 May 2019; Published: 29 May 2019 Abstract: Friction stir welding is a method of materials processing that enables the joining of similar and dissimilar materials. The process, as originally designed by The Welding Institute (TWI), provides a unique approach to manufacturing—where materials can be joined in many designs and still retain mechanical properties that are similar to, or greater than, other forms of welding. This process is not free of defects that can alter, limit, and occasionally render the resulting weld unusable. Most common amongst these defects are kissing bonds, wormholes and cracks that are often hidden from visual inspection. To identify these defects, various nondestructive testing methods are being used. This paper presents background to the process of friction stir welding and identifies major process parameters that affect the weld properties, the origin, and types of defects that can occur, and potential nondestructive methods for ex-situ detection and in-situ identification of these potential defects, which can then allow for corrective action to be taken. -

Metalwork-Topics.Pdf
Published in 2012 by Professional Development Service for Teachers (PDST) Junior Certificate School Programme Blackrock Education Centre Kill Avenue Dún Laoghaire Co. Dublin Phone: 01 236 5000 Fax: 01 236 5071 Email: [email protected] Web: www.jcsp.ie Copyright © PDST, 2012 The Professional Development Service for Teachers (PDST) is funded by the Teacher Education Section of the Department of Education and Skills under the National Development Plan 2007-2013. The Junior Certificate School Programme Literacy and Numeracy Strategy and the Demonstration Library Project are funded by the Early Literacy Initiative and the Delivering Equality of Opportunity in Schools (DEIS) Action Plan within the Teacher Education Section of the Department of Education and Skills. Written by Diarmuid Mooney Edited by Isabel Baker and Mary Clare Higgins, JCSP Associates CONTENTS Page Chapter 1 Health & Safety 2 Chapter 2 Where Iron comes From 5 Chapter 3 Iron to Steel 9 Chapter 4 Metal Families 15 Chapter 5 Plastics 19 Chapter 6 Measuring & Marking Out 23 Chapter 7 Bench Work 27 Chapter 8 The Drill 31 Chapter 9 The Lathe 36 Chapter 10 Thread Cutting 40 Chapter 11 Joining Material 45 Chapter 12 Hot & Cold Forming 50 Chapter 13 Engines 52 Chapter 14 Electricity at Home 60 Chapter 15 Electronics 62 Metalwork at a Glance 1 HEALTH & SAFETY In the metalwork room there are a number of dangers you have to watch out for. Here are some rules you should follow to stay safe. 1) No loose clothing worn whenever you are working on a Loose clothing can get caught in the machine. -

A Review on Drilling of Metal Matrix Composites
International Journal of Current Engineering and Technology E-ISSN 2277 – 4106, P-ISSN 2347 – 5161 ©2016 INPRESSCO®, All Rights Reserved Available at http://inpressco.com/category/ijcet Review Article A Review on Drilling of Metal Matrix Composites Shrinivas Jadhavϯ , Jaywant Sankpal‡ , Mukesh Chaudhari! and Nilesh Patil* ϯMechanical Engineering Department, JSPM’s Rajarshi Shahu College of Engineering Pune 411 033, Maharashtra, India. ‡Mechanical Engineering Department, Army Institute of Technology, Pune 411 015, Maharashtra, India. !School of Mechanical and Building Sciences, VIT University, Chennai Campus, Chennai 600 127, India. *Mechanical Engineering Department, Marathwada Institute of Technology, Aurangabad 43 1010, Maharashtra, India. Accepted 01 Oct 2016, Available online 05 Oct 2016, Special Issue-6 (Oct 2016) Abstract Metal matrix composites have superior mechanical properties contrary to metals over a wide range of working conditions. This makes them a prominent option in replacing metals for different engineering applications. These materials are developed for engine blocks, bearing for propeller vanes, steering system, drive shafts in aircraft. Particle reinforced aluminium MMCs have received considerable attention due to their excellent engineering properties like high strength to weight ratio, high toughness, high impact strength etc. But these materials are usually regarded as extremely hard to machine, because of the abrasive characteristics of the reinforced particulates. It is also acknowledged that their machining behaviour is not fully understood. Amongst all machining processes, drilling is the most frequently useful for secondary machining of composite materials due to the need for joining the structure. The literature reviewed here is the effect of drilling parameters like feed rate, drilling tool and its geometry, cutting speed and other parameters like influence of coolants, heat treatment etc. -

Bringing You up to Speed on Steel, Aluminum, Manufactured Components, and the Htsuses Vocabulary
Bringing You Up To Speed On Steel, Aluminum, Manufactured Components, and the HTSUSes Vocabulary (b) (6) 1 What the Next 3 Hours Will Attempt To Do • Background on Steel and Aluminum and Their Alloys • Terminology Overview • Metallurgy, Processing, Manufacturing, Shapes, Standards and Specs • Going Over The Exclusion Request and Objection Forms • What does THAT word mean??!?! • HTSUS 72 and 73 for Steel • HTSUS 76 for Aluminum PLEASE interrupt me for questions!! 2 U.S. Department of Commerce International Trade Administration Nuggets of Wisdom • HTSUS categories seem to be a combo of • Chemistry – broad categories of alloy, non-alloy, etc • Shape – all three dimensions plus hollow-ness • Somewhat intended use, tied to shape (finished products) • NOT mechanical properties except one value for steel • Keep calm, and read the submission. 3 Metal Terminology Overview • What is a Metal and an Alloy? • Alloy Microstructure Terminology • Alloy Chemistry Terminology • Heat Treating Terminology • Processing Terminology • Mechanical Properties Terminology • Shape and Dimension Definitions • Standards and Specifications 4 U.S. Department of Commerce International Trade Administration What is a metal? • Metals and alloys are made of crystals • The crystals are called grains, and have a grain size • The grains meet at grain boundaries • If the metal has more than one type of crystal, these are each called a phase of the alloy – multiphase alloy • Each has a different orientation, shape, size, purpose • Each crystal is a spring of atomic bonds • When -

Friction Bit Joining of Similar Alloy Sheets of High-Strength Aluminum Alloy 7085" (2018)
Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2018-06-01 Friction Bit Joining of Similar Alloy Sheets of High- Strength Aluminum Alloy 7085 Matthew R. Okazaki Brigham Young University Follow this and additional works at: https://scholarsarchive.byu.edu/etd Part of the Science and Technology Studies Commons BYU ScholarsArchive Citation Okazaki, Matthew R., "Friction Bit Joining of Similar Alloy Sheets of High-Strength Aluminum Alloy 7085" (2018). All Theses and Dissertations. 6866. https://scholarsarchive.byu.edu/etd/6866 This Thesis is brought to you for free and open access by BYU ScholarsArchive. It has been accepted for inclusion in All Theses and Dissertations by an authorized administrator of BYU ScholarsArchive. For more information, please contact [email protected], [email protected]. Friction Bit Joining of Similar Alloy Sheets of High-Strength Aluminum Alloy 7085 Matthew R. Okazaki A thesis submitted to the faculty of Brigham Young University in partial fulfillment of the requirements for the degree of Master of Science Mike P. Miles, Chair Jason M. Weaver Yuri Hovanski School of Technology Brigham Young University Copyright © 2018 Matthew R. Okazaki All Rights Reserved ABSTRACT Friction Bit Joining of Similar Alloy Sheets of High-Strength Aluminum Alloy 7085 Matthew R. Okazaki School of Technology, BYU Master of Science Friction Bit Joining (FBJ) is a new technology used primarily in joining dissimilar metals. Its primary use has been focused in the automotive industry to provide an alternative joining process to welding. As automotive manufacturing has continually pushed toward using dissimilar materials, new joining processes have been needed to replace traditional welding practices that do not perform well when materials are not weld compatible. -

1.4 METAL CUTTING BAND SAWS: Metals Can Be Bought From
INTRODUCTION TO MACHINING 1.4 METAL CUTTING BAND SAWS: Metals can be bought from suppliers in standardized forms and sizes, such as round, rectangular or square bar stock or in the form of large sheets (plates). Bar stock normally is available in lengths of up to 4 [m], sheets in dimensions up to 1.2 [m] x 2.4 [m]. This means that for most “jobs” the bar stock needs to be cut to length; this is normally done using band saws. Sheets are pre-cut using flame or plasma cutting machines or shearing machines and can then be further cut using band saws. There are two types of band saws used for cutting metal: the vertical band saw and the horizontal cut-off saw. 38 INTRODUCTION TO MACHINING 1.4.1 Vertical band saw: It is used to cut metal plate to a required approximate size, the so-called “blank”, which is then converted into the final product using machines such as the Mill, the Drill Press or the Lathe. Bar stock can be cut on a vertical band saw, but the preferred machine is the horizontal band saw. A continuous blade runs in a vertical plane, in a clock- wise direction. Most of it is hidden inside the housing of the machine and only a small part (slightly more than the thickness of the material to be cut) is exposed between the table and the bottom end of the blade guard. The blade guard can be raised or lowered by loosening and tightening the guard adjustment knob. The work-piece must be resting on, and be fully supported by the table; do not cut round bar stock in this type of saw, unless you are using a machining vise to hold the bar.