Introduction to Embedded System Design Using Field Programmable Gate Arrays Rahul Dubey
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Transistor Circuit Guidebook Byron Wels TAB BOOKSBLUE RIDGE SUMMIT, PA
TAB BOOKS No. 470 34.95 By Byron Wels TransistorCircuit GuidebookByronWels TABBLUE RIDGE BOOKS SUMMIT,PA. 17214 Preface beforemeIa supposepioneer (along the my withintransistor firstthe many field.experiencewith wasother Weknown. World were using WarUnlike solid-stateIIsolid-state GIs) today's asdevices somewhat experimen- receivers marks of FIRST EDITION devicester,ownFirst, withsemiconductors! youwith a choice swipedwhichor tank. ofto a sealed,Here'sexperiment, pairThen ofhow encapsulated, you earphones we carefullywe did had it: from totookand construct the veryonenearest exoticof our the THIRDSECONDFIRST PRINTING-SEPTEMBER PRINTING-AUGUST PRINTING-JANUARY 1972 1970 1968 plane,wasyouAnphonesantenna. emptywound strung jeep,apart After toiletfull outand ofclippingas paper wire,unwoundhigh closelyrollandthe servedascatchthe far spaced.wire offas as itfrom a thewouldsafetyThe thecoil remaining-pin,magnetreach-for form, you inside.which stuckwire the Copyright © 1968by TAB BOOKS coatedNext,it into youneeded,a hunkribbons of -ofwooda razor -steel, soblade.the but point Oh,aItblued was noneprojected placedblade of the -quenchat so fancy right the pointplastic-bluedangles.of -, Reproduction or publicationPrinted inof the ofAmerica the United content States in any manner, with- themindfoundphoneground pin you,the was couldserved right not wired contact lacquerspotas toa onground blade, it. theblued.blade'sAconnector, pin,bayonet bluing,and stuck antennaand you hilt thecould coil.-deep other actuallyIfin ear- youthe isoutherein. assumed express -

JTAG Programmer Overview for Hercules-Based Microcontrollers
Application Report SPNA230–November 2015 JTAG Programmer Overview for Hercules-Based Microcontrollers CharlesTsai ABSTRACT This application report describes the necessary steps needed by the third party developers to create a JTAG-based flash programmer for the Hercules™ family of microcontrollers. This document does not substitute the existing user guides on JTAG access to the target systems and how to program the Flash memory, but rather serves as a central location to reference these documents with clarifications specific to the implementation of the Hercules family of microcontrollers. Contents 1 Introduction ................................................................................................................... 2 2 Hercules JTAG Scan Architecture......................................................................................... 2 3 Creating the Firmware to Program the Flash Memory ................................................................ 22 4 Flash Verification ........................................................................................................... 23 5 References .................................................................................................................. 23 List of Figures 1 Hercules JTAG Scan Architecture......................................................................................... 3 2 Conceptual ICEPICK-C Block Diagram for Hercules Implementation ................................................ 5 3 Fields of the 32-Bit Scan Value for Accessing Mapped Registers -

L'universite BORDEAUX 1 DOCTEUR Ahmed BEN ATITALLAH
N° d’ordre 3409 THESE présentée à L’UNIVERSITE BORDEAUX 1 ECOLE DOCTORALE DES SCIENCES PHYSIQUES ET DE L’INGENIEUR POUR OBTENIR LE GRADE DE DOCTEUR SPECIALITE : ELECTRONIQUE Par Ahmed BEN ATITALLAH Etude et Implantation d’Algorithmes de Compression d’Images dans un Environnement Mixte Matériel et Logiciel Soutenue le : 11 Juillet 2007 Après avis de : M. Noureddine ELLOUZE Professeur à l’ENIT, Tunis, Tunisie Rapporteur M. Patrick GARDA Professeur à l’Université Paris VI Rapporteur Devant la Commission d’examen formée de : M. Lotfi KAMOUN Professeur à l’ENIS, Sfax, Tunisie Président M. Patrick GARDA Professeur à l’Université Paris VI Rapporteur M. Noureddine ELLOUZE Professeur à l’ENIT, Tunis, Tunisie Rapporteur M. Philippe MARCHEGAY Professeur à l’ENSEIRB M. Nouri MASMOUDI Professeur à l’ENIS, Sfax, Tunisie M. Patrice KADIONIK Maître de Conférences à l’ENSEIRB M. Patrice NOUEL Maître de Conférences à l’ENSEIRB -2007- A mes parents A ma famille A tous ceux qui me tiennent à cœur REMERCIEMENTS Cette thèse s’est effectuée en cotutelle entre l’équipe circuits et systèmes du Laboratoire d'Electronique et des Technologies de l'Information (LETI) de l’ENIS à Sfax, Tunisie ainsi que dans l’équipe Circuits Intégrés Numériques du Laboratoire de l’Intégration du Matériau au Système (IMS) de l’Université de Bordeaux et de l’ENSEIRB. Je remercie Monsieur le Professeur Nouri MASMOUDI ainsi que Monsieur le Professeur Philippe MARCHEGAY pour m’avoir accueilli au sein de leur équipe et pour l’intérêt qu’ils ont porté au déroulement de mes travaux. Je tiens à présenter ma vive gratitude à Monsieur Patrice KADIONIK, Maître de conférences à l’ENSEIRB, co-encadrant de ma thèse et Monsieur Patrice NOUEL, Maître de conférences à l’ENSEIRB, qui ont contribué activement à la réalisation de mes travaux, d’une part pour leurs conseils efficaces, leurs grandes compétences mais aussi pour leurs grandes qualités humaines. -
GS40 0.11-Μm CMOS Standard Cell/Gate Array
GS40 0.11-µm CMOS Standard Cell/Gate Array Version 1.0 January 29, 2001 Copyright Texas Instruments Incorporated, 2001 The information and/or drawings set forth in this document and all rights in and to inventions disclosed herein and patents which might be granted thereon disclosing or employing the materials, methods, techniques, or apparatus described herein are the exclusive property of Texas Instruments. No disclosure of information or drawings shall be made to any other person or organization without the prior consent of Texas Instruments. IMPORTANT NOTICE Texas Instruments and its subsidiaries (TI) reserve the right to make changes to their products or to discontinue any product or service without notice, and advise customers to obtain the latest version of relevant information to verify, before placing orders, that information being relied on is current and complete. All products are sold subject to the terms and conditions of sale supplied at the time of order acknowledgement, including those pertaining to warranty, patent infringement, and limitation of liability. TI warrants performance of its semiconductor products to the specifications applicable at the time of sale in accordance with TI’s standard warranty. Testing and other quality control techniques are utilized to the extent TI deems necessary to support this war- ranty. Specific testing of all parameters of each device is not necessarily performed, except those mandated by government requirements. Certain applications using semiconductor products may involve potential risks of death, personal injury, or severe property or environmental damage (“Critical Applications”). TI SEMICONDUCTOR PRODUCTS ARE NOT DESIGNED, AUTHORIZED, OR WAR- RANTED TO BE SUITABLE FOR USE IN LIFE-SUPPORT DEVICES OR SYSTEMS OR OTHER CRITICAL APPLICATIONS. -
Latticemico32 Development Kit User's Guide for Latticeecp
LatticeMico32 Development Kit User’s Guide for LatticeECP Lattice Semiconductor Corporation 5555 NE Moore Court Hillsboro, OR 97124 (503) 268-8000 May 2007 Copyright Copyright © 2007 Lattice Semiconductor Corporation. This document may not, in whole or part, be copied, photocopied, reproduced, translated, or reduced to any electronic medium or machine- readable form without prior written consent from Lattice Semiconductor Corporation. Trademarks Lattice Semiconductor Corporation, L Lattice Semiconductor Corporation (logo), L (stylized), L (design), Lattice (design), LSC, E2CMOS, Extreme Performance, FlashBAK, flexiFlash, flexiMAC, flexiPCS, FreedomChip, GAL, GDX, Generic Array Logic, HDL Explorer, IPexpress, ISP, ispATE, ispClock, ispDOWNLOAD, ispGAL, ispGDS, ispGDX, ispGDXV, ispGDX2, ispGENERATOR, ispJTAG, ispLEVER, ispLeverCORE, ispLSI, ispMACH, ispPAC, ispTRACY, ispTURBO, ispVIRTUAL MACHINE, ispVM, ispXP, ispXPGA, ispXPLD, LatticeEC, LatticeECP, LatticeECP-DSP, LatticeECP2, LatticeECP2M, LatticeMico8, LatticeMico32, LatticeSC, LatticeSCM, LatticeXP, LatticeXP2, MACH, MachXO, MACO, ORCA, PAC, PAC-Designer, PAL, Performance Analyst, PURESPEED, Reveal, Silicon Forest, Speedlocked, Speed Locking, SuperBIG, SuperCOOL, SuperFAST, SuperWIDE, sysCLOCK, sysCONFIG, sysDSP, sysHSI, sysI/O, sysMEM, The Simple Machine for Complex Design, TransFR, UltraMOS, and specific product designations are either registered trademarks or trademarks of Lattice Semiconductor Corporation or its subsidiaries in the United States and/or other countries. ISP, Bringing the Best Together, and More of the Best are service marks of Lattice Semiconductor Corporation. Other product names used in this publication are for identification purposes only and may be trademarks of their respective companies. Disclaimers NO WARRANTIES: THE INFORMATION PROVIDED IN THIS DOCUMENT IS “AS IS” WITHOUT ANY EXPRESS OR IMPLIED WARRANTY OF ANY KIND INCLUDING WARRANTIES OF ACCURACY, COMPLETENESS, MERCHANTABILITY, NONINFRINGEMENT OF INTELLECTUAL PROPERTY, OR FITNESS FOR ANY PARTICULAR PURPOSE. -
Latticemico32 Software Developer User Guide
LatticeMico32 Software Developer User Guide May 2014 Copyright Copyright © 2014 Lattice Semiconductor Corporation. This document may not, in whole or part, be copied, photocopied, reproduced, translated, or reduced to any electronic medium or machine-readable form without prior written consent from Lattice Semiconductor Corporation. Trademarks Lattice Semiconductor Corporation, L Lattice Semiconductor Corporation (logo), L (stylized), L (design), Lattice (design), LSC, CleanClock, Custom Mobile Device, DiePlus, E2CMOS, ECP5, Extreme Performance, FlashBAK, FlexiClock, flexiFLASH, flexiMAC, flexiPCS, FreedomChip, GAL, GDX, Generic Array Logic, HDL Explorer, iCE Dice, iCE40, iCE65, iCEblink, iCEcable, iCEchip, iCEcube, iCEcube2, iCEman, iCEprog, iCEsab, iCEsocket, IPexpress, ISP, ispATE, ispClock, ispDOWNLOAD, ispGAL, ispGDS, ispGDX, ispGDX2, ispGDXV, ispGENERATOR, ispJTAG, ispLEVER, ispLeverCORE, ispLSI, ispMACH, ispPAC, ispTRACY, ispTURBO, ispVIRTUAL MACHINE, ispVM, ispXP, ispXPGA, ispXPLD, Lattice Diamond, LatticeCORE, LatticeEC, LatticeECP, LatticeECP-DSP, LatticeECP2, LatticeECP2M, LatticeECP3, LatticeECP4, LatticeMico, LatticeMico8, LatticeMico32, LatticeSC, LatticeSCM, LatticeXP, LatticeXP2, MACH, MachXO, MachXO2, MachXO3, MACO, mobileFPGA, ORCA, PAC, PAC-Designer, PAL, Performance Analyst, Platform Manager, ProcessorPM, PURESPEED, Reveal, SensorExtender, SiliconBlue, Silicon Forest, Speedlocked, Speed Locking, SuperBIG, SuperCOOL, SuperFAST, SuperWIDE, sysCLOCK, sysCONFIG, sysDSP, sysHSI, sysI/O, sysMEM, The Simple Machine for Complex -

Intel Quartus Prime Pro Edition User Guide: Programmer Send Feedback
Intel® Quartus® Prime Pro Edition User Guide Programmer Updated for Intel® Quartus® Prime Design Suite: 21.2 Subscribe UG-20134 | 2021.07.21 Send Feedback Latest document on the web: PDF | HTML Contents Contents 1. Intel® Quartus® Prime Programmer User Guide..............................................................4 1.1. Generating Primary Device Programming Files........................................................... 5 1.2. Generating Secondary Programming Files................................................................. 6 1.2.1. Generating Secondary Programming Files (Programming File Generator)........... 7 1.2.2. Generating Secondary Programming Files (Convert Programming File Dialog Box)............................................................................................. 11 1.3. Enabling Bitstream Security for Intel Stratix 10 Devices............................................ 18 1.3.1. Enabling Bitstream Authentication (Programming File Generator)................... 19 1.3.2. Specifying Additional Physical Security Settings (Programming File Generator).............................................................................................. 21 1.3.3. Enabling Bitstream Encryption (Programming File Generator).........................22 1.4. Enabling Bitstream Encryption or Compression for Intel Arria 10 and Intel Cyclone 10 GX Devices.................................................................................................. 23 1.5. Generating Programming Files for Partial Reconfiguration......................................... -
An Architecture and Compiler for Scalable On-Chip Communication
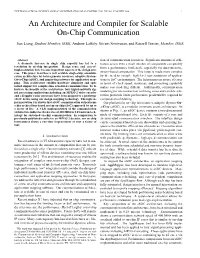
IEEE TRANSACTIONS ON VERY LARGE SCALE INTEGRATION (VLSI) SYSTEMS, VOL. XX, NO. Y, MONTH 2004 1 An Architecture and Compiler for Scalable On-Chip Communication Jian Liang, Student Member, IEEE, Andrew Laffely, Sriram Srinivasan, and Russell Tessier, Member, IEEE Abstract— tion of communication resources. Significant amounts of arbi- A dramatic increase in single chip capacity has led to a tration across even a small number of components can quickly revolution in on-chip integration. Design reuse and ease-of- form a performance bottleneck, especially for data-intensive, implementation have became important aspects of the design pro- cess. This paper describes a new scalable single-chip communi- stream-based computation. This issue is made more complex cation architecture for heterogeneous resources, adaptive System- by the need to compile high-level representations of applica- On-a-Chip (aSOC), and supporting software for application map- tions to SoC environments. The heterogeneous nature of cores ping. This architecture exhibits hardware simplicity and opti- in terms of clock speed, resources, and processing capability mized support for compile-time scheduled communication. To il- makes cost modeling difficult. Additionally, communication lustrate the benefits of the architecture, four high-bandwidth sig- nal processing applications including an MPEG-2 video encoder modeling for interconnection with long wires and variable arbi- and a Doppler radar processor have been mapped to a prototype tration protocols limits performance predictability required by aSOC device using our design mapping technology. Through ex- computation scheduling. perimentation it is shown that aSOC communication outperforms Our platform for on-chip interconnect, adaptive System-On- a hierarchical bus-based system-on-chip (SoC) approach by up to a-Chip (aSOC), is a modular communications architecture. -

On-Chip Interconnect Schemes for Reconfigurable System-On-Chip
On-chip Interconnect Schemes for Reconfigurable System-on-Chip Andy S. Lee, Neil W. Bergmann. School of ITEE, The University of Queensland, Brisbane Australia {andy, n.bergmann} @itee.uq.edu.au ABSTRACT On-chip communication architectures can have a great influence on the speed and area of System-on-Chip designs, and this influence is expected to be even more pronounced on reconfigurable System-on-Chip (rSoC) designs. To date, little research has been conducted on the performance implications of different on-chip communication architectures for rSoC designs. This paper motivates the need for such research and analyses current and proposed interconnect technologies for rSoC design. The paper also describes work in progress on implementation of a simple serial bus and a packet-switched network, as well as a methodology for quantitatively evaluating the performance of these interconnection structures in comparison to conventional buses. Keywords: FPGAs, Reconfigurable Logic, System-on-Chip 1. INTRODUCTION System-on-chip (SoC) technology has evolved as the predominant circuit design methodology for custom ASICs. SoC technology moves design from the circuit level to the system level, concentrating on the selection of appropriate pre-designed IP Blocks, and their interconnection into a complete system. However, modern ASIC design and fabrication are expensive. Design tools may cost many hundreds of thousands of dollars, while tooling and mask costs for large SoC designs now approach $1million. For low volume applications, and especially for research and development projects in universities, reconfigurable System-on-Chip (rSoC) technology is more cost effective. Like conventional SoC design, rSoC involves the assembly of predefined IP blocks (such as processors and peripherals) and their interconnection. -
Introduction to ASIC Design
’14EC770 : ASIC DESIGN’ An Introduction Application - Specific Integrated Circuit Dr.K.Kalyani AP, ECE, TCE. 1 VLSI COMPANIES IN INDIA • Motorola India – IC design center • Texas Instruments – IC design center in Bangalore • VLSI India – ASIC design and FPGA services • VLSI Software – Design of electronic design automation tools • Microchip Technology – Offers VLSI CMOS semiconductor components for embedded systems • Delsoft – Electronic design automation, digital video technology and VLSI design services • Horizon Semiconductors – ASIC, VLSI and IC design training • Bit Mapper – Design, development & training • Calorex Institute of Technology – Courses in VLSI chip design, DSP and Verilog HDL • ControlNet India – VLSI design, network monitoring products and services • E Infochips – ASIC chip design, embedded systems and software development • EDAIndia – Resource on VLSI design centres and tutorials • Cypress Semiconductor – US semiconductor major Cypress has set up a VLSI development center in Bangalore • VDAT 2000 – Info on VLSI design and test workshops 2 VLSI COMPANIES IN INDIA • Sandeepani – VLSI design training courses • Sanyo LSI Technology – Semiconductor design centre of Sanyo Electronics • Semiconductor Complex – Manufacturer of microelectronics equipment like VLSIs & VLSI based systems & sub systems • Sequence Design – Provider of electronic design automation tools • Trident Techlabs – Power systems analysis software and electrical machine design services • VEDA IIT – Offers courses & training in VLSI design & development • Zensonet Technologies – VLSI IC design firm eg3.com – Useful links for the design engineer • Analog Devices India Product Development Center – Designs DSPs in Bangalore • CG-CoreEl Programmable Solutions – Design services in telecommunications, networking and DSP 3 Physical Design, CAD Tools. • SiCore Systems Pvt. Ltd. 161, Greams Road, ... • Silicon Automation Systems (India) Pvt. Ltd. ( SASI) ... • Tata Elxsi Ltd. -

AXI Reference Guide
AXI Reference Guide [Guide Subtitle] [optional] UG761 (v13.4) January 18, 2012 [optional] Xilinx is providing this product documentation, hereinafter “Information,” to you “AS IS” with no warranty of any kind, express or implied. Xilinx makes no representation that the Information, or any particular implementation thereof, is free from any claims of infringement. You are responsible for obtaining any rights you may require for any implementation based on the Information. All specifications are subject to change without notice. XILINX EXPRESSLY DISCLAIMS ANY WARRANTY WHATSOEVER WITH RESPECT TO THE ADEQUACY OF THE INFORMATION OR ANY IMPLEMENTATION BASED THEREON, INCLUDING BUT NOT LIMITED TO ANY WARRANTIES OR REPRESENTATIONS THAT THIS IMPLEMENTATION IS FREE FROM CLAIMS OF INFRINGEMENT AND ANY IMPLIED WARRANTIES OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE. Except as stated herein, none of the Information may be copied, reproduced, distributed, republished, downloaded, displayed, posted, or transmitted in any form or by any means including, but not limited to, electronic, mechanical, photocopying, recording, or otherwise, without the prior written consent of Xilinx. © Copyright 2012 Xilinx, Inc. XILINX, the Xilinx logo, Virtex, Spartan, Kintex, Artix, ISE, Zynq, and other designated brands included herein are trademarks of Xilinx in the United States and other countries. All other trademarks are the property of their respective owners. ARM® and AMBA® are registered trademarks of ARM in the EU and other countries. All other trademarks are the property of their respective owners. Revision History The following table shows the revision history for this document: . Date Version Description of Revisions 03/01/2011 13.1 Second Xilinx release. -

Openpiton: an Open Source Manycore Research Framework
OpenPiton: An Open Source Manycore Research Framework Jonathan Balkind Michael McKeown Yaosheng Fu Tri Nguyen Yanqi Zhou Alexey Lavrov Mohammad Shahrad Adi Fuchs Samuel Payne ∗ Xiaohua Liang Matthew Matl David Wentzlaff Princeton University fjbalkind,mmckeown,yfu,trin,yanqiz,alavrov,mshahrad,[email protected], [email protected], fxiaohua,mmatl,[email protected] Abstract chipset Industry is building larger, more complex, manycore proces- sors on the back of strong institutional knowledge, but aca- demic projects face difficulties in replicating that scale. To Tile alleviate these difficulties and to develop and share knowl- edge, the community needs open architecture frameworks for simulation, synthesis, and software exploration which Chip support extensibility, scalability, and configurability, along- side an established base of verification tools and supported software. In this paper we present OpenPiton, an open source framework for building scalable architecture research proto- types from 1 core to 500 million cores. OpenPiton is the world’s first open source, general-purpose, multithreaded manycore processor and framework. OpenPiton leverages the industry hardened OpenSPARC T1 core with modifica- Figure 1: OpenPiton Architecture. Multiple manycore chips tions and builds upon it with a scratch-built, scalable uncore are connected together with chipset logic and networks to creating a flexible, modern manycore design. In addition, build large scalable manycore systems. OpenPiton’s cache OpenPiton provides synthesis and backend scripts for ASIC coherence protocol extends off chip. and FPGA to enable other researchers to bring their designs to implementation. OpenPiton provides a complete verifica- tion infrastructure of over 8000 tests, is supported by mature software tools, runs full-stack multiuser Debian Linux, and has been widespread across the industry with manycore pro- is written in industry standard Verilog.