Orbital Lifetime Predictions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

PDF (03Ragozzine Exo-Interiors.Pdf)
20 Chapter 2 Probing the Interiors of Very Hot Jupiters Using Transit Light Curves This chapter will be published in its entirety under the same title by authors D. Ragozzine and A. S. Wolf in the Astrophysical Journal, 2009. Reproduced by permission of the American Astro- nomical Society. 21 Abstract Accurately understanding the interior structure of extra-solar planets is critical for inferring their formation and evolution. The internal density distribution of a planet has a direct effect on the star-planet orbit through the gravitational quadrupole field created by the rotational and tidal bulges. These quadrupoles induce apsidal precession that is proportional to the planetary Love number (k2p, twice the apsidal motion constant), a bulk physical characteristic of the planet that depends on the internal density distribution, including the presence or absence of a massive solid core. We find that the quadrupole of the planetary tidal bulge is the dominant source of apsidal precession for very hot Jupiters (a . 0:025 AU), exceeding the effects of general relativity and the stellar quadrupole by more than an order of magnitude. For the shortest-period planets, the planetary interior induces precession of a few degrees per year. By investigating the full photometric signal of apsidal precession, we find that changes in transit shapes are much more important than transit timing variations. With its long baseline of ultra-precise photometry, the space-based Kepler mission can realistically detect apsidal precession with the accuracy necessary to infer the presence or absence of a massive core in very hot Jupiters with orbital eccentricities as low as e ' 0:003. -
Cubesat Data Analysis Revision
371-XXXXX Revision - CubeSat Data Analysis Revision - November 2015 Prepared by: GSFC/Code 371 National Aeronautics and Goddard Space Flight Center Space Administration Greenbelt, Maryland 20771 371-XXXXX Revision - Signature Page Prepared by: ___________________ _____ Mark Kaminskiy Date Reliability Engineer ARES Corporation Accepted by: _______________________ _____ Nasir Kashem Date Reliability Lead NASA/GSFC Code 371 1 371-XXXXX Revision - DOCUMENT CHANGE RECORD REV DATE DESCRIPTION OF CHANGE LEVEL APPROVED - Baseline Release 2 371-XXXXX Revision - Table of Contents 1 Introduction 4 2 Statement of Work 5 3 Database 5 4 Distributions by Satellite Classes, Users, Mass, and Volume 7 4.1 Distribution by satellite classes 7 4.2 Distribution by satellite users 8 4.3 CubeSat Distribution by mass 8 4.4 CubeSat Distribution by volume 8 5 Annual Number of CubeSats Launched 9 6 Reliability Data Analysis 10 6.1 Introducing “Time to Event” variable 10 6.2 Probability of a Successful Launch 10 6.3 Estimation of Probability of Mission Success after Successful Launch. Kaplan-Meier Nonparametric Estimate and Weibull Distribution. 10 6.3.1 Kaplan-Meier Estimate 10 6.3.2 Weibull Distribution Estimation 11 6.4 Estimation of Probability of mission success after successful launch as a function of time and satellite mass using Weibull Regression 13 6.4.1 Weibull Regression 13 6.4.2 Data used for estimation of the model parameters 13 6.4.3 Comparison of the Kaplan-Meier estimates of the Reliability function and the estimates based on the Weibull regression 16 7 Conclusion 17 8 Acknowledgement 18 9 References 18 10 Appendix 19 Table of Figures Figure 4-1 CubeSats distribution by mass .................................................................................................... -

Highlights in Space 2010
International Astronautical Federation Committee on Space Research International Institute of Space Law 94 bis, Avenue de Suffren c/o CNES 94 bis, Avenue de Suffren UNITED NATIONS 75015 Paris, France 2 place Maurice Quentin 75015 Paris, France Tel: +33 1 45 67 42 60 Fax: +33 1 42 73 21 20 Tel. + 33 1 44 76 75 10 E-mail: : [email protected] E-mail: [email protected] Fax. + 33 1 44 76 74 37 URL: www.iislweb.com OFFICE FOR OUTER SPACE AFFAIRS URL: www.iafastro.com E-mail: [email protected] URL : http://cosparhq.cnes.fr Highlights in Space 2010 Prepared in cooperation with the International Astronautical Federation, the Committee on Space Research and the International Institute of Space Law The United Nations Office for Outer Space Affairs is responsible for promoting international cooperation in the peaceful uses of outer space and assisting developing countries in using space science and technology. United Nations Office for Outer Space Affairs P. O. Box 500, 1400 Vienna, Austria Tel: (+43-1) 26060-4950 Fax: (+43-1) 26060-5830 E-mail: [email protected] URL: www.unoosa.org United Nations publication Printed in Austria USD 15 Sales No. E.11.I.3 ISBN 978-92-1-101236-1 ST/SPACE/57 *1180239* V.11-80239—January 2011—775 UNITED NATIONS OFFICE FOR OUTER SPACE AFFAIRS UNITED NATIONS OFFICE AT VIENNA Highlights in Space 2010 Prepared in cooperation with the International Astronautical Federation, the Committee on Space Research and the International Institute of Space Law Progress in space science, technology and applications, international cooperation and space law UNITED NATIONS New York, 2011 UniTEd NationS PUblication Sales no. -

Mission Overview
CRS Orb-1 Mission Mission Overview Overview Under the Commercial Resupply Services (CRS) contract with NASA, Orbital will provide approximately 20 metric tons of cargo to the International Space Station over the course of eight missions. Orb-1 is the first of those missions. The Orb-1 mission builds on the successful Commercial Orbital Transportation Services (COTS) demonstration mission conducted from September 18 to October 23, 2013. The Orb-1 flight will carry substantially more cargo (1465 kg vs. 700 kg) than the COTS mission, including several time-sensitive payloads and Cygnus’ first powered payload, the Commercial Generic Bioprocessing Apparatus (CGBA) from Bioserve. Mission Overview, Cont. Antares® The configuration of the Antares launch vehicle for the Orb-1 Mission is much the same as the two previous Antares flights with a CASTOR 30B second stage motor instead of the CASTOR 30 used previously. The first stage includes a core that contains the tanks for the liquid oxygen and kerosene, the first stage avionics, and two AJ26 rocket engines. The second stage consists of the CASTOR® 30B solid rocket motor, an avionics section containing the flight computer and guidance/ navigation/control functions, an interstage that connects the solid rocket motor to the first stage, the Cygnus spacecraft, and a fairing that encloses and protects the Cygnus spacecraft during ascent. Continued on Next Page Mission Overview, Cont. Cygnus™ The Cygnus spacecraft is composed of two elements, the Service Module (SM) and the Pressurized Cargo Module (PCM). The SM provides the propulsion, power, guidance, navigation and control, and other “housekeeping” services for the duration of the mission. -

NASA Process for Limiting Orbital Debris
NASA-HANDBOOK NASA HANDBOOK 8719.14 National Aeronautics and Space Administration Approved: 2008-07-30 Washington, DC 20546 Expiration Date: 2013-07-30 HANDBOOK FOR LIMITING ORBITAL DEBRIS Measurement System Identification: Metric APPROVED FOR PUBLIC RELEASE – DISTRIBUTION IS UNLIMITED NASA-Handbook 8719.14 This page intentionally left blank. Page 2 of 174 NASA-Handbook 8719.14 DOCUMENT HISTORY LOG Status Document Approval Date Description Revision Baseline 2008-07-30 Initial Release Page 3 of 174 NASA-Handbook 8719.14 This page intentionally left blank. Page 4 of 174 NASA-Handbook 8719.14 This page intentionally left blank. Page 6 of 174 NASA-Handbook 8719.14 TABLE OF CONTENTS 1 SCOPE...........................................................................................................................13 1.1 Purpose................................................................................................................................ 13 1.2 Applicability ....................................................................................................................... 13 2 APPLICABLE AND REFERENCE DOCUMENTS................................................14 3 ACRONYMS AND DEFINITIONS ...........................................................................15 3.1 Acronyms............................................................................................................................ 15 3.2 Definitions ......................................................................................................................... -

The Annual Compendium of Commercial Space Transportation: 2012
Federal Aviation Administration The Annual Compendium of Commercial Space Transportation: 2012 February 2013 About FAA About the FAA Office of Commercial Space Transportation The Federal Aviation Administration’s Office of Commercial Space Transportation (FAA AST) licenses and regulates U.S. commercial space launch and reentry activity, as well as the operation of non-federal launch and reentry sites, as authorized by Executive Order 12465 and Title 51 United States Code, Subtitle V, Chapter 509 (formerly the Commercial Space Launch Act). FAA AST’s mission is to ensure public health and safety and the safety of property while protecting the national security and foreign policy interests of the United States during commercial launch and reentry operations. In addition, FAA AST is directed to encourage, facilitate, and promote commercial space launches and reentries. Additional information concerning commercial space transportation can be found on FAA AST’s website: http://www.faa.gov/go/ast Cover art: Phil Smith, The Tauri Group (2013) NOTICE Use of trade names or names of manufacturers in this document does not constitute an official endorsement of such products or manufacturers, either expressed or implied, by the Federal Aviation Administration. • i • Federal Aviation Administration’s Office of Commercial Space Transportation Dear Colleague, 2012 was a very active year for the entire commercial space industry. In addition to all of the dramatic space transportation events, including the first-ever commercial mission flown to and from the International Space Station, the year was also a very busy one from the government’s perspective. It is clear that the level and pace of activity is beginning to increase significantly. -

SGAC-Annual-Report-2014.Pdf
ANNUAL REPORT SPACE GENERATION ADVISORY COUNCIL 2014 In support of the United Nations Programme on Space Applications A. TABLE OF CONTENTS A. Table of Contents 2 In support of the United Nations Programme B. Sponsors and Partners 4 on Space Applications 1. Introduction 10 1.1 About the SGAC 12 14 c/o European Space Policy Institute (ESPI) 1.2 Letter from the Co-chairs 15 Schwarzenbergplatz 6 1.3 Letter from the Executive Director 16 Vienna A-1030 1.4 SGAC output at a glance AUSTRIA 2. SGAC Background 22 2.1 History of the SGAC 24 26 [email protected] 2.2 Leadership and Structure 27 www.spacegeneration.org 2.3 Programme +41 1 718 11 18 30 3. The organisation in 2014 30 32 +43 1 718 11 18 99 3.1 Goal Achievement Review 3.2 SGAC Activity Highlights 36 42 © 2015 Space Generation Advisory Council 3.3 Space Generation Fusion Forum Report 3.4 Space Generation Congress Report 50 3.5 United Nations Report 62 3.6 SGAC Regional Workshops 66 3.7 SGAC Supported Events 68 3.8 Financial Summary 72 Acknowledgements 4. Projects 78 4.1 Project Outcomes and Highlights 80 The SGAC 2014 Annual Report was compiled and 4.2 Space Technologies for Disaster Management Project Group 81 edited by Minoo Rathansabapathy (South Africa/ 4.3 Near Earth Objects Project Group 82 Australia), Andrea Jaime (Spain), Laura Rose (USA) 4.4 Space Law and Policy Project Group 84 and Arno Geens (Belgium) with the assistance of 4.5 Commercial Space Project Group 86 Candice Goodwin (South Africa), Justin Park (USA), 4.6 Space Safety and Sustainability Project Group 88 Nikita Marwaha (United Kingdom), Dario Schor 4.7 Small Satellites Project Group 90 (Argentina/Canada), Leo Teeney (UK) and Abhijeet 4.8 Space Exploration Project Group 92 Kumar (Australia) in editing. -

Secretariat Distr.: General 23 February 2010
United Nations ST/SG/SER.E/573 Secretariat Distr.: General 23 February 2010 Original: English Committee on the Peaceful Uses of Outer Space Information furnished in conformity with the Convention on Registration of Objects Launched into Outer Space Note verbale dated 5 August 2009 from the Permanent Mission of the United States of America to the United Nations (Vienna) addressed to the Secretary-General The Permanent Mission of the United States of America to the United Nations (Vienna) presents its compliments to the Secretary-General of the United Nations and, in accordance with article IV of the Convention on Registration of Objects Launched into Outer Space (General Assembly resolution 3235 (XXIX), annex), has the honour to transmit registration data on space launches by the United States for the period from April to June 2009 (see annexes I-III). V.10-51330 (E) 100310 110310 *1051330* ST/SG/SER.E/573 2 Annex I Registration data on space launches by the United States of America for April 2009* The following report supplements the registration data on United States launches as at 30 April 2009. All launches were made from the territory of the United States unless otherwise specified. Basic orbital characteristics International Location Nodal period Inclination Apogee Perigee designation Name of space object Date of launch of launch (min) (degrees) (km) (km) General function of space object The following objects were launched since the last report and remain in orbit: 2009-017A WGS F2 (USA 204) 4 April 2009 – 116.3 26.9 2 865 168 Spacecraft engaged in practical applications and uses of space technology such as weather or communications 2009-017B Atlas 5 Centaur R/B 4 April 2009 – 1 264.0 20.8 64 248 448 Spent boosters, spent manoeuvring stages, shrouds and other non-functional objects The following objects not previously reported have been identified since the last report: None. -
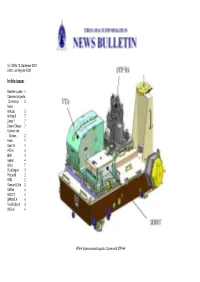
In This Issue
Vol. 38 No.12, September 2013 Editor: Jos Heyman FBIS In this issue: Satellite Update 4 Cancelled projects: Conestoga 5 News Ardusat 3 Arirang-5 7 Dnepr 1 7 Dream Chaser 7 Eutelsat and Satmex 2 Fermi 7 Gsat-14 7 HTV-4 3 iBall 3 Kepler 4 Orion 7 PicoDragon 3 Proton M 2 RCM 2 Russian EVAs 2 SARah 4 SGDC-1 4 SPRINT A 4 TechEdSat-3 3 WGS-6 4 HTV-4 Unpressurised Logistics Carrier with STP-H4 TIROS SPACE INFORMATION Eutelsat and Satmex 86 Barnevelder Bend, Southern River WA 6110, Australia Tel + 61 8 9398 1322 Eutelsat has acquired Mexico’s Satmex, a major communicaions satellite operator in the Latin (e-mail: [email protected]) American region. o o The Tiros Space Information (TSI) - News Bulletin is published to promote the scientific exploration and Satmex has currently three satellites in orbit at 113 W (Satmex-6), 114.9 W (Satmex-5) and commercial application of space through the dissemination of current news and historical facts. 116.8 oW (Satmex-8) and it can be expected that, once the acquisition has been completed, In doing so, Tiros Space Information continues the traditions of the Western Australian Branch of the these satellites will be renamed as part of the Eutelsat family. In addition Satmex has the Astronautical Society of Australia (1973-1975) and the Astronautical Society of Western Australia (ASWA) Satmex-7 and -9 satellites on order from Boeing. It is not clear whether these satellites will (1975-2006). remain on order. The News Bulletin can be received worldwide by e-mail subscription only. -

Commercial Orbital Transportation Services
National Aeronautics and Space Administration Commercial Orbital Transportation Services A New Era in Spaceflight NASA/SP-2014-617 Commercial Orbital Transportation Services A New Era in Spaceflight On the cover: Background photo: The terminator—the line separating the sunlit side of Earth from the side in darkness—marks the changeover between day and night on the ground. By establishing government-industry partnerships, the Commercial Orbital Transportation Services (COTS) program marked a change from the traditional way NASA had worked. Inset photos, right: The COTS program supported two U.S. companies in their efforts to design and build transportation systems to carry cargo to low-Earth orbit. (Top photo—Credit: SpaceX) SpaceX launched its Falcon 9 rocket on May 22, 2012, from Cape Canaveral, Florida. (Second photo) Three days later, the company successfully completed the mission that sent its Dragon spacecraft to the Station. (Third photo—Credit: NASA/Bill Ingalls) Orbital Sciences Corp. sent its Antares rocket on its test flight on April 21, 2013, from a new launchpad on Virginia’s eastern shore. Later that year, the second Antares lifted off with Orbital’s cargo capsule, (Fourth photo) the Cygnus, that berthed with the ISS on September 29, 2013. Both companies successfully proved the capability to deliver cargo to the International Space Station by U.S. commercial companies and began a new era of spaceflight. ISS photo, center left: Benefiting from the success of the partnerships is the International Space Station, pictured as seen by the last Space Shuttle crew that visited the orbiting laboratory (July 19, 2011). More photos of the ISS are featured on the first pages of each chapter. -
Cubesat-Services.Pdf
Space• Space Station Station Cubesat CubesatDeployment Services Deployment Services NanoRacks Cubesat Deployer (NRCSD) • 51.6 degree inclination, 385-400 KM • Orbit lifetime 8-12 months • Deployment typically 1-3 months after berthing • Soft stowage internal ride several times per year Photo credit: NASA NRCSD • Each NRCSD can deploy up to 6U of CubeSats • 8 NRCSD’s per airlock cycle, for a total of 48U deployment capability • ~2 Air Lock cycles per mission Photo Credit: NanoRacks LLC Photo credit: NASA 2. Launched by ISS visiting vehicle 3. NRCSDs installed by ISS Crew 5. Grapple by JRMS 4. JEM Air Lock depress & slide 6. NRCSDs positioned by JRMS table extension 1. NRCSDs transported in CTBs 7. Deploy 8. JRMS return NRCSD-MPEP stack to slide table; 9. ISS Crew un-install first 8 NRCSDs; repeat Slide table retracts and pressurizes JEM air lock install/deploy for second set of NRCSDs NanoRacks Cubesat Mission (NR-CM 3 ) • Orbital Sciences CRS-1 (Launched Jan. 9, 2014) • Planet Labs Flock1A, 28 Doves • Lithuanian Space Assoc., LitSat-1 • Vilnius University & NPO IEP, LituanicaSat-1 • Nanosatisfi, ArduSat-2 • Southern Stars, SkyCube • University of Peru, UAPSat-1 Photo credit: NASA Mission Highlights Most CubeSats launched Two countries attain in a single mission space-faring status World’s largest remote Kickstarter funding sensing constellation • NR-CM3 • Orbital Science CRS-1, Launch Jan 9, 2014 • Air Lock Cycle 1, Feb 11-15, 2014 Dove CubeSats • Deployers 1-8 (all Planet Labs Doves) Photo credit: NASA • NR-CM3 • Orbital Science CRS-1, -
Commercial Space Transportation Year in Review
2007 YEAR IN REVIEW INTRODUCTION INTRODUCTION The Commercial Space Transportation: 2007 upon liftoff, destroying the vehicle and the Year in Review summarizes U.S. and interna- satellite. tional launch activities for calendar year 2007 and provides a historical look at the past five Overall, 23 commercial orbital launches years of commercial launch activity. occurred worldwide in 2007, representing 34 percent of the 68 total launches for the year. The Federal Aviation Administration’s This marked an increase over 2006, which Office of Commercial Space Transportation saw 21 commercial orbital launches (FAA/AST) licensed four commercial orbital worldwide. launches in 2007. Three of these licensed launches were successful, while one resulted Russia conducted 12 commercial launch in a launch failure. campaigns in 2007, bringing its international commercial launch market share to 52 per- Of the four orbital licensed launches, cent for the year, a record high for Russia. three used a U.S.-built vehicle: the United Europe attained a 26 percent market share, Launch Alliance Delta II operated by Boeing conducting six commercial Ariane 5 launches. Launch Services. Two of the Delta II vehi- FAA/AST-licensed orbital launch activity cles, in the 7420-10 configuration, deployed accounted for 17 percent of the worldwide the first two Cosmo-Skymed remote sensing commercial launch market in 2007. India satellites for the Italian government. The conducted its first ever commercial launch, third, a Delta II 7925-10, launched the for four percent market share. Of the 68 WorldView 1 commercial remote sensing worldwide orbital launches, there were three satellite for DigitalGlobe. launch failures, including one non-commer- cial launch and two commercial launches.