Real-Time Aarly Warning of Clogging Risk in Slurry Shield Tunneling: a Self-Updating Machine Learning Approach
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Operator's Story Case Study: Guangzhou's Story
Railway and Transport Strategy Centre The Operator’s Story Case Study: Guangzhou’s Story © World Bank / Imperial College London Property of the World Bank and the RTSC at Imperial College London Community of Metros CoMET The Operator’s Story: Notes from Guangzhou Case Study Interviews February 2017 Purpose The purpose of this document is to provide a permanent record for the researchers of what was said by people interviewed for ‘The Operator’s Story’ in Guangzhou, China. These notes are based upon 3 meetings on the 11th March 2016. This document will ultimately form an appendix to the final report for ‘The Operator’s Story’ piece. Although the findings have been arranged and structured by Imperial College London, they remain a collation of thoughts and statements from interviewees, and continue to be the opinions of those interviewed, rather than of Imperial College London. Prefacing the notes is a summary of Imperial College’s key findings based on comments made, which will be drawn out further in the final report for ‘The Operator’s Story’. Method This content is a collation in note form of views expressed in the interviews that were conducted for this study. This mini case study does not attempt to provide a comprehensive picture of Guangzhou Metropolitan Corporation (GMC), but rather focuses on specific topics of interest to The Operators’ Story project. The research team thank GMC and its staff for their kind participation in this project. Comments are not attributed to specific individuals, as agreed with the interviewees and GMC. List of interviewees Meetings include the following GMC members: Mr. -
International Student Guide
Contents CHAPTER I PREPARATIONS BEFORE COMING TO CHINA 1. VISA APPLICATION (1) Introduction to the Student Visa.......................................................................2 (2) Requirements for Visa Application..................................................................2 2. WHAT TO BRING (1) Materials Required for Registration.................................................................2 (2) Other Recommended Items.............................................................................3 3. BANKING INFORMATION AND CURRENCY OPERATIONS (1) Introduction to Chinese Currency....................................................................4 (2) Foreign Currency Exchange Sites and Convertible Currencies................4 (3) Withdrawal Limits of Bank Accounts................................................................5 (4) Wire Transfer Services........................................................................................5 4. ACCOMMODATION (1) Check-in Time......................................................................................................5 (2) On-Campus Accommodation....................................................................5 (3) Off-Campus Accommodation and Nearby Hotels.......................................8 (4) Questions and Answers about Accommodation (Q&A).............................9 CHAPTER II HOW TO GET TO TIANJIN UNIVERSITY 5. HOW TO ARRIVE................................................................................................12 (1). How to Get to Weijin -

Sediment Provenance Discrimination in Northern Okinawa Trough During the Last 24 Ka and Paleoenvironmental Implication: Rare Earth Elements Evidence
JOURNAL OF RARE EARTHS, Vol. 30, No. 11, Nov. 2012, P. 1184 Sediment provenance discrimination in northern Okinawa Trough during the last 24 ka and paleoenvironmental implication: rare earth elements evidence XU Zhaokai (徐兆凯)1, LI Tiegang (李铁刚)1, CHANG Fengming (常凤鸣)1, CHOI Jinyong2, LIM Dhongil3, 4 XU Fangjian (徐方建) (1. Key Laboratory of Marine Geology and Environment, Institute of Oceanology, Chinese Academy of Sciences, Qingdao 266071, China; 2. Department of Oceanography, Kunsan National University, Kunsan 573-701, Korea; 3. South Sea Institute, Korea Ocean Research and Development Institute, Geoje 656-830, Korea; 4. School of Geo- sciences, China University of Petroleum, Qingdao 266555, China) Received 28 February 2012; revised 28 September 2012 Abstract: Rare earth elements (REE) compositions and discriminant function were successfully used to examine high resolution sediment source changes in the northern Okinawa Trough over the last 24.1 ka, especially for the influence from the Yellow River and the Tsushima Warm Current (TWC) that has not been well solved. Variations of these parameters were clearly divided into three distinct depositional units. During Interval 1 (24.1–16.0 ka BP), the paleo-Yellow River and the paleo-Yangtze River mouths were situated near the studied area and could have played major roles in the sedimentation therein. In Interval 2 (16.0–7.3 ka BP), these river mouths gradually retreated with global sea-level rise, leading to less fluvial inputs from them to the northern Okinawa Trough. Meanwhile, formation of the TWC could carry some sediment loads of Taiwan to the studied core, especially during its late phase (8.0–7.3 ka BP). -

Uk Debates: How Do We Build More Light Rail?
THE INTERNATIONAL LIGHT RAIL MAGAZINE www.lrta.org www.tautonline.com SEPTEMBER 2016 NO. 945 UK DEBATES: HOW DO WE BUILD MORE LIGHT RAIL? NET Phase Two economic impacts quantied Montpellier opens city tramway ring CRRC’s home-grown o-wire tram New York appoints Streetcar ‘czar’ ISSN 1460-8324 £4.25 09 San José Besancon5 America’s low-oor A simple, quality light rail convert system on a budget 9 771460 832043 LRT MONITOR e LRT MONITOR series from Mainspring is an essential reference work for anyone who operates in the world’s light and urban rail sectors. Featuring regular updates in both digital and print form, the LRT Monitor includes an overview of every established line and network as well as details of planned schemes and those under construction. POLAND POZNAŃ Tramways play an important role in one of of the main railway station. Poland’s biggest and most historic cities, with In 2012 a line opened to the east of the city, the first horse-drawn tramline opening in 1880. with an underground section containing two An overview Electrification followed in 1898. sub-surface stations and a new depot. The The network was badly damaged during World reconstruction of Kaponiera roundabout, an A high-quality War Two, resuming operations in 1947 and then important tram junction, is set for completion in of the system’s only east of the river Warta. Service returned to 2016. When finished, it will be a three-level image for ease the western side of the city in 1952 with the junction, with a PST interchange on the lower development, opening of the Marchlewski bridge (now named level. -

INTERIM REPORT 2018 BII RAILWAY TRANSPORTATION TECHNOLOGY HOLDINGS COMPANY LIMITED Corporate Information (Continued)
CONTENTS 2-3 Corporate Information 4 Consolidated Statement of Profit or Loss – Unaudited 5 Consolidated Statement of Profit or Loss and Other Comprehensive Income – Unaudited 6-7 Consolidated Statement of Financial Position – Unaudited 8-10 Consolidated Statement of Changes in Equity – Unaudited 11-12 Condensed Consolidated Cash Flow Statement – Unaudited 13-65 Notes to the Unaudited Interim Financial Report 66-67 Independent Review Report 68-77 Management Discussion and Analysis 78-86 Other Information Corporate Information BOARD OF DIRECTORS COMPANY SECRETARY Executive Directors Ms. Cheung Yuet Fan Mr. Cao Wei (Vice Chairman) Ms. Xuan Jing (Chief Executive Officer) AUDIT COMMITTEE Non-Executive Directors Mr. Luo Zhenbang (CPA) (Chairman) Mr. Guan Jifa (Chairman) Mr. Bai Jinrong Mr. Hao Weiya Mr. Huang Lixin Mr. Ren Yuhang Mr. Zheng Yi REMUNERATION Independent Non-Executive Directors COMMITTEE Mr. Bai Jinrong Mr. Bai Jinrong (Chairman) Mr. Luo Zhenbang (CPA) Mr. Cao Wei Mr. Huang Lixin Mr. Huang Lixin AUTHORISED NOMINATION COMMITTEE REPRESENTATIVES Mr. Guan Jifa (Chairman) PURSUANT TO RULE 3.05 Mr. Bai Jinrong OF THE LISTING RULES Mr. Huang Lixin Ms. Xuan Jing Ms. Cheung Yuet Fan AUDITORS KPMG Certified Public Accountants LEGAL ADVISERS TO THE COMPANY Chiu & Partners 2 INTERIM REPORT 2018 BII RAILWAY TRANSPORTATION TECHNOLOGY HOLDINGS COMPANY LIMITED Corporate Information (continued) PRINCIPAL BANKER BRANCH SHARE The Hongkong and Shanghai Banking REGISTRAR AND Corporation Limited TRANSFER OFFICE Tricor Investor Services Limited Level 22, Hopewell Centre REGISTERED OFFICE 183 Queen’s Road East Cricket Square Wanchai, Hong Kong Hutchins Drive P.O. Box 2681 Grand Cayman, KY1-1111 WEBSITE Cayman Islands www.biitt.cn HEAD OFFICE AND STOCK CODE PRINCIPAL PLACE 1522 OF BUSINESS IN HONG KONG Unit 4407, 44/F, COSCO Tower 183 Queen’s Road Central Sheung Wan, Hong Kong PRINCIPAL SHARE REGISTRAR AND TRANSFER OFFICE SMP Partners (Cayman) Limited Royal Bank House – 3rd Floor 24 Shedden Road P.O. -

Evolution of Urban Rail Signaling System Technology in China
Evolution of Urban Rail Signaling System Technology in China Mr. Dongjie Li Traffic Control Technology Co., Ltd. July-2019 Overview of China Rail 01 Transit Development CONTENTS Evolution of Signaling 02 System Technology of TCT « Overview of China Rail 01 Transit Development Overview of China Rail Transit Development 1969 2018 2020 We are experiencing a rapid development stage The first rail 132 urban rail 6000km transit line in lines China Beijing Subway Line 1 83% adopt By 2020, the total « built in July, 1965 and CBTC system, with operation mileage opened in January, operation mileage will be up to 6000km. 1971, with 10.7km. 4354.30km « Evolution of Signaling 02 System Technology of TCT Evolution of Signaling System product of TCT 2019 Intelligent rail transportation system 40 years R&D of signaling system 2018 Interoperable Fully automatic operation system Cloud Platform for urban rail systems 2017 Train Intelligent Detection System Rail transit 2016 Vehicle-vehicle communication based Train Trans-disciplinary control system Multi-field LTE based DCS system LCF-500 2015 Interoperable signalling system for network LCF-400 2014 Fully automatic operation 2011 Train operation centred Integrated automation Signaling System 2009 Information security LCF-300 2008 STM CBTC Pilot plant test LCF-200 2002-09 LCF-100 Beijing BaTong Line 1 LCF-200 Passenger dedicated Railway LCF-100 2004 CBTC R&D Subject communication device 1998 LCF-100 through appraisal Product 1996 Urban rail R&D ATP 1993 SJ-93 communication device Railway test 1990"Eighth -

Trams Der Welt / Trams of the World 2021 Daten / Data © 2021 Peter Sohns Seite / Page 1
www.blickpunktstrab.net – Trams der Welt / Trams of the World 2021 Daten / Data © 2021 Peter Sohns Seite / Page 1 Algeria ... Alger (Algier) ... Metro ... 1435 mm Algeria ... Alger (Algier) ... Tram (Electric) ... 1435 mm Algeria ... Constantine ... Tram (Electric) ... 1435 mm Algeria ... Oran ... Tram (Electric) ... 1435 mm Algeria ... Ouragla ... Tram (Electric) ... 1435 mm Algeria ... Sétif ... Tram (Electric) ... 1435 mm Algeria ... Sidi Bel Abbès ... Tram (Electric) ... 1435 mm Argentina ... Buenos Aires, DF ... Metro ... 1435 mm Argentina ... Buenos Aires, DF - Caballito ... Heritage-Tram (Electric) ... 1435 mm Argentina ... Buenos Aires, DF - Lacroze (General Urquiza) ... Interurban (Electric) ... 1435 mm Argentina ... Buenos Aires, DF - Premetro E ... Tram (Electric) ... 1435 mm Argentina ... Buenos Aires, DF - Tren de la Costa ... Tram (Electric) ... 1435 mm Argentina ... Córdoba, Córdoba ... Trolleybus Argentina ... Mar del Plata, BA ... Heritage-Tram (Electric) ... 900 mm Argentina ... Mendoza, Mendoza ... Tram (Electric) ... 1435 mm Argentina ... Mendoza, Mendoza ... Trolleybus Argentina ... Rosario, Santa Fé ... Heritage-Tram (Electric) ... 1435 mm Argentina ... Rosario, Santa Fé ... Trolleybus Argentina ... Valle Hermoso, Córdoba ... Tram-Museum (Electric) ... 600 mm Armenia ... Yerevan ... Metro ... 1524 mm Armenia ... Yerevan ... Trolleybus Australia ... Adelaide, SA - Glenelg ... Tram (Electric) ... 1435 mm Australia ... Ballarat, VIC ... Heritage-Tram (Electric) ... 1435 mm Australia ... Bendigo, VIC ... Heritage-Tram -
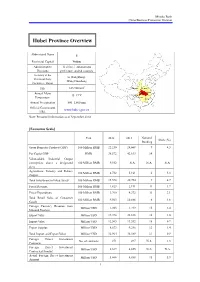
Hubei Province Overview
Mizuho Bank China Business Promotion Division Hubei Province Overview Abbreviated Name E Provincial Capital Wuhan Administrative 12 cities, 1 autonomous Divisions prefecture, and 64 counties Secretary of the Li Hongzhong; Provincial Party Wang Guosheng Committee; Mayor 2 Size 185,900 km Shaanxi Henan Annual Mean Hubei Anhui 15–17°C Chongqing Temperature Hunan Jiangxi Annual Precipitation 800–1,600 mm Official Government www.hubei.gov.cn URL Note: Personnel information as of September 2014 [Economic Scale] Unit 2012 2013 National Share (%) Ranking Gross Domestic Product (GDP) 100 Million RMB 22,250 24,668 9 4.3 Per Capita GDP RMB 38,572 42,613 14 - Value-added Industrial Output (enterprises above a designated 100 Million RMB 9,552 N.A. N.A. N.A. size) Agriculture, Forestry and Fishery 100 Million RMB 4,732 5,161 6 5.3 Output Total Investment in Fixed Assets 100 Million RMB 15,578 20,754 9 4.7 Fiscal Revenue 100 Million RMB 1,823 2,191 11 1.7 Fiscal Expenditure 100 Million RMB 3,760 4,372 11 3.1 Total Retail Sales of Consumer 100 Million RMB 9,563 10,886 6 4.6 Goods Foreign Currency Revenue from Million USD 1,203 1,219 15 2.4 Inbound Tourism Export Value Million USD 19,398 22,838 16 1.0 Import Value Million USD 12,565 13,552 18 0.7 Export Surplus Million USD 6,833 9,286 12 1.4 Total Import and Export Value Million USD 31,964 36,389 17 0.9 Foreign Direct Investment No. -

Trams Der Welt / Trams of the World 2020 Daten / Data © 2020 Peter Sohns Seite/Page 1 Algeria
www.blickpunktstrab.net – Trams der Welt / Trams of the World 2020 Daten / Data © 2020 Peter Sohns Seite/Page 1 Algeria … Alger (Algier) … Metro … 1435 mm Algeria … Alger (Algier) … Tram (Electric) … 1435 mm Algeria … Constantine … Tram (Electric) … 1435 mm Algeria … Oran … Tram (Electric) … 1435 mm Algeria … Ouragla … Tram (Electric) … 1435 mm Algeria … Sétif … Tram (Electric) … 1435 mm Algeria … Sidi Bel Abbès … Tram (Electric) … 1435 mm Argentina … Buenos Aires, DF … Metro … 1435 mm Argentina … Buenos Aires, DF - Caballito … Heritage-Tram (Electric) … 1435 mm Argentina … Buenos Aires, DF - Lacroze (General Urquiza) … Interurban (Electric) … 1435 mm Argentina … Buenos Aires, DF - Premetro E … Tram (Electric) … 1435 mm Argentina … Buenos Aires, DF - Tren de la Costa … Tram (Electric) … 1435 mm Argentina … Córdoba, Córdoba … Trolleybus … Argentina … Mar del Plata, BA … Heritage-Tram (Electric) … 900 mm Argentina … Mendoza, Mendoza … Tram (Electric) … 1435 mm Argentina … Mendoza, Mendoza … Trolleybus … Argentina … Rosario, Santa Fé … Heritage-Tram (Electric) … 1435 mm Argentina … Rosario, Santa Fé … Trolleybus … Argentina … Valle Hermoso, Córdoba … Tram-Museum (Electric) … 600 mm Armenia … Yerevan … Metro … 1524 mm Armenia … Yerevan … Trolleybus … Australia … Adelaide, SA - Glenelg … Tram (Electric) … 1435 mm Australia … Ballarat, VIC … Heritage-Tram (Electric) … 1435 mm Australia … Bendigo, VIC … Heritage-Tram (Electric) … 1435 mm www.blickpunktstrab.net – Trams der Welt / Trams of the World 2020 Daten / Data © 2020 Peter Sohns Seite/Page -
Final Program
5th IFAC Conference on Engine and Powertrain Control, Simulation and Modeling Final Program Sept. 20-22, 2018, Changchun, China Copyright and Reprint Permission: This material is permitted for personal use. For any other copying, reprint, republication or redistribution permission, please contact IFAC Secretariat, Schlossplatz 12, 2361 Laxenburg, AUSTRIA. All rights reserved. Copyright©2018 by IFAC. Contents Welcome Message ............................................................................................................ 1 Organizing Committee ...................................................................................................... 2 Program Committee .......................................................................................................... 6 General Information .......................................................................................................... 8 Venue, Date and Transportation .................................................................................... 10 Conference Floor Plan .................................................................................................... 13 Social Events ................................................................................................................... 15 Plenary Lectures ............................................................................................................. 20 Academic-industrial Panel Discussion ......................................................................... 27 Pre-conference Workshops -

China Clean Energy Study Tour for Urban Infrastructure Development
China Clean Energy Study Tour for Urban Infrastructure Development BUSINESS ROUNDTABLE Tuesday, August 13, 2019 Hyatt Centric Fisherman’s Wharf Hotel • San Francisco, CA CONNECT WITH USTDA AGENDA China Urban Infrastructure Development Business Roundtable for U.S. Industry Hosted by the U.S. Trade and Development Agency (USTDA) Tuesday, August 13, 2019 ____________________________________________________________________ 9:30 - 10:00 a.m. Registration - Banquet AB 9:55 - 10:00 a.m. Administrative Remarks – KEA 10:00 - 10:10 a.m. Welcome and USTDA Overview by Ms. Alissa Lee - Country Manager for East Asia and the Indo-Pacific - USTDA 10:10 - 10:20 a.m. Comments by Mr. Douglas Wallace - Director, U.S. Department of Commerce Export Assistance Center, San Francisco 10:20 - 10:30 a.m. Introduction of U.S.-China Energy Cooperation Program (ECP) Ms. Lucinda Liu - Senior Program Manager, ECP Beijing 10:30 a.m. - 11:45 a.m. Delegate Presentations 10:30 - 10:45 a.m. Presentation by Professor ZHAO Gang - Director, Chinese Academy of Science and Technology for Development 10:45 - 11:00 a.m. Presentation by Mr. YAN Zhe - General Manager, Beijing Public Transport Tram Corporation 11:00 - 11:15 a.m. Presentation by Mr. LI Zhongwen - Head of Safety Department, Shenzhen Metro 11:15 - 11:30 a.m. Tea/Coffee Break 11:30 - 11:45 a.m. Presentation by Ms. WANG Jianxin - Deputy General Manager, Tianjin Metro Operation Corporation 11:45 a.m. - 12:00 p.m. Presentation by Mr. WANG Changyu - Director of General Engineer's Office, Wuhan Metro Group 12:00 - 12:15 p.m. -

Changchun Taoist Temple
Line 1: Changchun Taoist temple Changchun Taoist temple, one of the most famous Taoist temples in China, located in wuhan, hubei province, is the only existing Taoist temple in this area. It was listed as a national key Taoist temple by the state council in 1983. The Taoist temple is located in the south of shuangfeng mountain in wuhan city. It is said that laozi, the ancestor of Taoism, once stayed here. Taoist architecture appeared here as early as the 3rd century BC. During the yuan dynasty, qiu chuji, a famous representative of quanzhen school, came here to practice and preach, which further expanded its scale. Because qiu chuji was called changchun real person, the Taoist temple was called changchun view. Since its establishment, the influence of changchun outlook has been constantly expanding, and it was further expanded in the Ming and qing dynasties to form its current scale. It sits in the south, built according to the mountain, the main building is the gate, lingguan dian, taiqing dian, three emperor dian, etc., compact layout, large scale. Next to the building of qizhen temple, there is a hall of merit and virtue, with an astronomical panorama inlaid on the wall. It was completed by the famous Taoist priest Lilian in the 1930s, which has a high reference value for the study of ancient astronomy. Now, changchun view is not only the local center of Taoist activities, but also a scenic tourist resort, every year many visitors and believers come to worship. Guiyuan Buddhist Temple Guiyuan Buddhist Temple is located at the west end of cuiwei street in hanyang, hubei province, China.