Final Program
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Sharing and Co-Construction of University Resources in the Region
2021 2nd Annual Conference of Education, Teaching and Learning (ACETL 2021) Sharing and Co-Construction of University Resources in the Region Xuedan Xiu Harbin Finance University, Harbin, Heilongjiang, China [email protected] Keywords: Intraregional, University resources, Sharing and co-construction Abstract: At present, the sharing and co-construction of educational resources between colleges and universities has become a popular way, which is of great significance for enriching school educational resources and improving the level of school running. However, the Northeast region is currently limited by its own development problems and the lack of sound education system There are many constraints and obstacles in resource sharing and cooperation among universities, which make the role of resource sharing and co-construction of universities to improve the level of running universities not fully realized. This paper focuses on the current issue of resource sharing and co-construction of universities in Northeast China. By analyzing the current situation of resource sharing and co-construction of universities in the region, this paper finds out the factors restricting the development of regional universities, and then puts forward suggestions for improving the level of regional universities. 1. Introduction Due to the increasingly prominent contradiction between the society’s infinite demand for high-quality teaching resources and the limited supply, how to achieve the school’s educational level keeping pace with the times under the premise of limited resource conditions, and to provide students with sufficient and fair educational resources and educational opportunities It has become a problem facing many universities today. In this case, a regional alliance education resource sharing platform relying on Internet technology and personal handheld terminals has almost become an inevitable choice. -

Download Article
Advances in Social Science, Education and Humanities Research (ASSEHR), volume 75 2016 International Seminar on Education, Innovation and Economic Management (SEIEM 2016) Research and Practice of College Education System Zhao Xianglian Sun Bin Center for Teaching and Learning Development Graduate School of Jilin Agricultural University Jilin Agricultural University Changchun, China Changchun, China [email protected] Zhou Jianzhong Center for Teaching and Learning Development Jilin Agricultural University Changchun, China Abstract—To serve the society and economy of Jilin Province university education and talent of macro management and "three rural" development as the purpose and to respond to control functions, enterprise is the main employment of college major national strategic needs for the ultimate goal brings graduates training quality and source of feedback, the together universities, local governments and enterprises university is among the three main local government and tripartite forces to build a "multi-dimensional" cooperative cooperative enterprises, the combining site is talent cultivation. education man system. Multidimensional refers to talent training Based on the above universities and local governments, for combining site, the coordination and cooperation with local between enterprises to build a base (special type of school, governments and enterprises; Stereo refers to students all-round type of school and enterprise, science and technology development as the goal, students' knowledge, ability and quality demonstration zone type), shared resources (space, funding, of three-dimensional, coordinated development. The system is research and development equipment, production environment, driven by joint training, motivation, and diverse interactive stereoscopic structure of three kinds of mechanisms to support, scholarships, scientific research platform, senior experts in Jilin agricultural university. -
The Operator's Story Case Study: Guangzhou's Story
Railway and Transport Strategy Centre The Operator’s Story Case Study: Guangzhou’s Story © World Bank / Imperial College London Property of the World Bank and the RTSC at Imperial College London Community of Metros CoMET The Operator’s Story: Notes from Guangzhou Case Study Interviews February 2017 Purpose The purpose of this document is to provide a permanent record for the researchers of what was said by people interviewed for ‘The Operator’s Story’ in Guangzhou, China. These notes are based upon 3 meetings on the 11th March 2016. This document will ultimately form an appendix to the final report for ‘The Operator’s Story’ piece. Although the findings have been arranged and structured by Imperial College London, they remain a collation of thoughts and statements from interviewees, and continue to be the opinions of those interviewed, rather than of Imperial College London. Prefacing the notes is a summary of Imperial College’s key findings based on comments made, which will be drawn out further in the final report for ‘The Operator’s Story’. Method This content is a collation in note form of views expressed in the interviews that were conducted for this study. This mini case study does not attempt to provide a comprehensive picture of Guangzhou Metropolitan Corporation (GMC), but rather focuses on specific topics of interest to The Operators’ Story project. The research team thank GMC and its staff for their kind participation in this project. Comments are not attributed to specific individuals, as agreed with the interviewees and GMC. List of interviewees Meetings include the following GMC members: Mr. -

1 Zhirong “Jerry” Zhao
Updated 03/16/2020 ZHIRONG “JERRY” ZHAO Gross Family Professor, Public & Nonprofit Management Hubert H. Humphrey School of Public Affairs, University of Minnesota (UMN) 301 19th Avenue South, Minneapolis, MN 55455 [email protected], 612-625-7318 (phone) BIOGRAPHICAL INFORMATION Education 2005 Ph.D. of Public Administration, University of Georgia (UGA), Athens 1997 Master of Urban Planning, Tongji University, Shanghai, China 1993 Bachelor of Urban Planning, Tongji University, Shanghai, China Academic Positions 2019- pres. Chair Leadership & Management Area, Humphrey School of Public Affairs, UMN 2019–pres. Gross Family Professor, Humphrey School of Public Affairs, UMN 2017- pres. Director, Master of Public Policy Program, Humphrey School of Public Affairs, UMN 2017- pres. Founding Director, Institute for Urban & Regional Infrastructure Finance, UMN 2012–2019 Associate Professor, Humphrey School of Public Affairs, UMN 2007–2011 Assistant Professor, Humphrey School of Public Affairs, UMN 2005–2007 Director, Political Science Internship Program, Eastern Michigan University 2005–2007 Assistant Professor, Department of Political Science, Eastern Michigan University Professional Experience 2002–2005 Education Program Specialist, Carl Vinson Institute of Government, UGA 1993–1998 Assistant Urban Planner, Xiamen Academy of Urban Planning & Design, China Awards and Honors 2020 SCPA Leadership Award, American Society for Public Administration (ASPA) 2018 Outstanding Services Award, Center for Transportation Studies, UMN 2018 Leadership Award, China-America -

Information for Exchange Student to Jilin University
Fact sheet for Student Exchange Program Jilin University A. University Profile: Name of University Jilin University University Website http://www.jlu.edu.cn Founded in 1946 and merged at the beginning of 21st Century with other 5 universities, Jilin University has become the biggest university in China. Today, the University enrolls 73,072 full-time students, 27,397 of whom are graduate students and 2,415 are international students. 6,657 faculty members including 2,110 full professors have made great contribution to the academic excellence of the University. With the support from the Ministry of Education, especially from “985 Brief Introduction of the Project” and “211 Project” etc., the University has taken it seriously to University create a perfect atmosphere for scientific research, educational innovation and talent cultivation. So far, the University has established exchange and cooperation ties with 289 institutions in 39 countries or regions. Aiming to become an internationally renowned research-oriented university, the University offers big options of programs, covering all the 13 academic categories in China: philosophy, economics, law, literature, education, history, science, engineering, agriculture, medicine, management, military science and arts. 70,000+ domestic students 2,300+ international students Student Populations Over 100 exchange students from our partner universities The international students come from 122 countries, most of whom are from Korea, India, Japan and so on . Office Responsible for Outbound: Inbound: Int’l Exchange Students Office of Global Engagement Collage of International Education Mailing Address http://oic.jlu.edu.cn/ http://cie.jlu.edu.cn/ Location Dingxin Building Youyi Guest house 1 Mr.WANG Xinlu,Section Chief (North America, Europe, Australia, Russia, Southeast Asia, Africa ) Email: [email protected] Contact Information Ms. -
International Student Guide
Contents CHAPTER I PREPARATIONS BEFORE COMING TO CHINA 1. VISA APPLICATION (1) Introduction to the Student Visa.......................................................................2 (2) Requirements for Visa Application..................................................................2 2. WHAT TO BRING (1) Materials Required for Registration.................................................................2 (2) Other Recommended Items.............................................................................3 3. BANKING INFORMATION AND CURRENCY OPERATIONS (1) Introduction to Chinese Currency....................................................................4 (2) Foreign Currency Exchange Sites and Convertible Currencies................4 (3) Withdrawal Limits of Bank Accounts................................................................5 (4) Wire Transfer Services........................................................................................5 4. ACCOMMODATION (1) Check-in Time......................................................................................................5 (2) On-Campus Accommodation....................................................................5 (3) Off-Campus Accommodation and Nearby Hotels.......................................8 (4) Questions and Answers about Accommodation (Q&A).............................9 CHAPTER II HOW TO GET TO TIANJIN UNIVERSITY 5. HOW TO ARRIVE................................................................................................12 (1). How to Get to Weijin -

Ke Zhang, Ph.D
KE ZHANG, PH.D. Department of Chemistry and Chemical Biology Northeastern University 360 Huntington Ave, Boston MA 02115 Tel: (617) 373-4415 | Email: [email protected] Group website: www.northeastern.edu/polymer Google Scholar: https://scholar.google.com/citations?user=whWec_kAAAAJ&hl=en EDUCATION Nanjing University of Technology 2001-2005 B.S. in Applied Chemistry Washington University in St. Louis 2005-2009 Ph.D. in Chemistry Advisor: Prof. Karen Wooley Northwestern University 2010-2012 Postdoctoral fellow in the Department of Chemistry Advisor: Prof. Chad Mirkin EMPLOYMENT Associate Professor Northeastern University 2017-present Department of Chemistry and Chemical Biology Assistant Professor Northeastern University 2012-2017 Department of Chemistry and Chemical Biology HONORS AND AWARDS ACS PMSE Young Investigator Award 2018 Nano Research Young Innovator Award 2017 NSF CAREER Award 2014 ACS PRF Doctoral New Investigator Award 2014 International Institute of Nanotechnology Outstanding Researcher Award 2012 PUBLICATIONS Peer-reviewed journal articles At Northeastern: Bolded names: undergraduate researchers 1. Tan, X.; Jia, F.; Miller, A. E.; Zhang, K.* “Nucleic acid-based drug delivery strategies”, submitted 2. Li, H.; Li, Y.; Xiao, Y.; Zhang, B.; Cheng, Z.; Shi, J.; Xiong, J.; Li, Z.; Zhang, K.* “Molecularly well-defined DNA-polymer miktoarm stars for enzyme-resistant nanoflares and carrier-free gene regulation”, Bioconjugate Chemistry, 2020, DOI: 10.1021/acs.bioconjchem.0c00017 1 3. Jia, F.; Song, J.; Kubiak, J.; Santos, P.; Sano, K.; Holten-Andersen, N.; Zhang, K.; Macfarlane, R. “Bottlebrush polymers as nanoscale building blocks for hydrogel synthesis”, submitted 4. Qin, X.; Si, Y.; Wu, Z.; Zhang, K.; Li, J.; Yin, Y. “Alkyne/Ruthenium(II) complex-based ratiometric SERS nanoprobe for in vitro and ex vivo tracking of carbon monoxide”, Analytical Chemistry, 2020, 92, 924 5. -

Sediment Provenance Discrimination in Northern Okinawa Trough During the Last 24 Ka and Paleoenvironmental Implication: Rare Earth Elements Evidence
JOURNAL OF RARE EARTHS, Vol. 30, No. 11, Nov. 2012, P. 1184 Sediment provenance discrimination in northern Okinawa Trough during the last 24 ka and paleoenvironmental implication: rare earth elements evidence XU Zhaokai (徐兆凯)1, LI Tiegang (李铁刚)1, CHANG Fengming (常凤鸣)1, CHOI Jinyong2, LIM Dhongil3, 4 XU Fangjian (徐方建) (1. Key Laboratory of Marine Geology and Environment, Institute of Oceanology, Chinese Academy of Sciences, Qingdao 266071, China; 2. Department of Oceanography, Kunsan National University, Kunsan 573-701, Korea; 3. South Sea Institute, Korea Ocean Research and Development Institute, Geoje 656-830, Korea; 4. School of Geo- sciences, China University of Petroleum, Qingdao 266555, China) Received 28 February 2012; revised 28 September 2012 Abstract: Rare earth elements (REE) compositions and discriminant function were successfully used to examine high resolution sediment source changes in the northern Okinawa Trough over the last 24.1 ka, especially for the influence from the Yellow River and the Tsushima Warm Current (TWC) that has not been well solved. Variations of these parameters were clearly divided into three distinct depositional units. During Interval 1 (24.1–16.0 ka BP), the paleo-Yellow River and the paleo-Yangtze River mouths were situated near the studied area and could have played major roles in the sedimentation therein. In Interval 2 (16.0–7.3 ka BP), these river mouths gradually retreated with global sea-level rise, leading to less fluvial inputs from them to the northern Okinawa Trough. Meanwhile, formation of the TWC could carry some sediment loads of Taiwan to the studied core, especially during its late phase (8.0–7.3 ka BP). -

Jilin University China Studies International Summer School 2013 China Studies International Summer School 2013
Jilin University China Studies International Summer School 2013 China Studies International Summer School 2013 Welcome to Jilin University On behalf of Jilin University, we are more than happy to invite you to join the China Studies International Summer School (CSISS) at Jilin University (JLU) at the summer time of 2013. JLU endeavors to bring prestigious professors and international students cross the world together and offer to the students high-level academic programs, significant cultural experiences and unforgettable stay in Changchun of China. CSISS 2013 of Jilin University offers: ●Knowledge on Chinese History, Law, Economy, Politics, Society, History, Philosophy, Culture and a lot more; ●Sightseeing in Northeast part of China and in Beijing, Shanghai and Xi’an; ●Opportunities to meet first class professors and attend lectures; ●Classmates from all over the world. Welcome to the International Summer School at Jilin University 2013! Why JLU? Founded in 1946, merged with the former Jilin University of Technology, former Bethune Medical University, former Changchun University of Science and Technology, former Changchun College of Posts and Communications and former University of Military Logistics, Jilin University is one of the key research universities under the direct aegis of the Education Ministry of China, ranking among top 10 in China and top 400 in the world. JLU is the largest university in China, and offers all the categories of academic 1 China Studies International Summer School 2013 disciplines, including Science, Engineering, Agriculture, Medicine, Economics, Law, Business Administration, Education, History, Literature, Philosophy, Military Science and Arts. Jilin University has the highest enrollment in China with more than 68,000 full-time students in 46 colleges/ schools. -

Participants: (In Order of the Surname)
Participants 31 Participants: (in order of the surname) Yansong Bai yyyòòòttt: Jilin University, Changchun. E-mail: [email protected] Jianhai Bao ïïï°°°: Central South University, Changsha. E-mail: [email protected] Chuanzhong Chen •••DDD¨¨¨: Hainan Normal University, Haikou. E-mail: [email protected] Dayue Chen •••ŒŒŒ: Peking University, Beijing. E-mail: [email protected] Haotian Chen •••hhhUUU: Jilin University, Changchun. E-mail: [email protected] Longyu Chen •••999ˆˆˆ: Peking University, Beijing. E-mail: [email protected] Man Chen •••ùùù: Capital Normal University, Beijing. E-mail: [email protected] Mu-Fa Chen •••777{{{: Beijing Normal University, Beijing. E-mail: [email protected] Shukai Chen •••ÓÓÓppp: Beijing Normal University, Beijing. E-mail: [email protected] Xia Chen •••ggg: Jilin University, Changchun; University of Tennessee, USA. E-mail: [email protected] Xin Chen •••lll: Shanghai Jiao Tong University, Shanghai. E-mail: [email protected] Xue Chen •••ÆÆÆ: Capital Normal University, Beijing. E-mail: [email protected] Zengjing Chen •••OOO¹¹¹: Shandong University, Jinan. E-mail: [email protected] 32 Participants Huihui Cheng §§§¦¦¦¦¦¦: North China University of Water Resources and Electric Power, Zhengzhou E-mail: [email protected] Lan Cheng §§§===: Central South University, Changsha. E-mail: [email protected] Zhiwen Cheng §§§“““>>>: Beijing Normal University, Beijing. E-mail: [email protected] Michael Choi éééRRRZZZ: The Chinese University of Hong Kong, Shenzhen. E-mail: [email protected] Bowen Deng """ÆÆÆ©©©: Jilin University, Changchun. E-mail: [email protected] Changsong Deng """ttt: Wuhan University, Wuhan. E-mail: [email protected] Xue Ding ¶¶¶ÈÈÈ: Jilin University, Changchun. -

Histoire De L'extrême-Orient Prémoderne Et Épigraphie Chinoise
Annuaire de l'École pratique des hautes études (EPHE), Section des sciences historiques et philologiques Résumés des conférences et travaux 141 | 2011 2008-2009 Histoire de l’Extrême-orient prémoderne et épigraphie chinoise Pierre Marsone Édition électronique URL : https://journals.openedition.org/ashp/1063 DOI : 10.4000/ashp.1063 ISSN : 1969-6310 Éditeur Publications de l’École Pratique des Hautes Études Édition imprimée Date de publication : 2 février 2011 Pagination : 341-347 ISSN : 0766-0677 Référence électronique Pierre Marsone, « Histoire de l’Extrême-orient prémoderne et épigraphie chinoise », Annuaire de l'École pratique des hautes études (EPHE), Section des sciences historiques et philologiques [En ligne], 141 | 2011, mis en ligne le 25 février 2011, consulté le 06 juillet 2021. URL : http://journals.openedition.org/ashp/ 1063 ; DOI : https://doi.org/10.4000/ashp.1063 Tous droits réservés : EPHE Résumés des conférences 341 HISTOIRE DE L’EXTRÊME-ORIENT PRÉMODERNE ET ÉPIGRAPHIE CHINOISE Maître de conférences : M. Pierre Marsone Programme de l’année 2008-2009 : I. Histoire des empires sinisés (Liao, Jin) et de la Chine sous les Mongols : textes historiques sur l’installation et la consolidation de l’empire des Khitan (IX e siècle). — II. Initiation à l’épigraphie chinoise : stèles de personnages mongols et d’Asie centrale sous les Yuan (suite). I. Fondation de l’empire khitan : la deuxième partie du règne d’Abaoji (916-926) Dans le cadre du programme historique des conférences, nous avons étudié en détail la deuxième partie du règne d’Abaoji (916-926) à travers une lecture intégrale, annotée et commentée, du deuxième chapitre de l’Histoire des Liao (Liaoshi). -
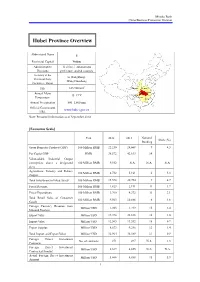
Hubei Province Overview
Mizuho Bank China Business Promotion Division Hubei Province Overview Abbreviated Name E Provincial Capital Wuhan Administrative 12 cities, 1 autonomous Divisions prefecture, and 64 counties Secretary of the Li Hongzhong; Provincial Party Wang Guosheng Committee; Mayor 2 Size 185,900 km Shaanxi Henan Annual Mean Hubei Anhui 15–17°C Chongqing Temperature Hunan Jiangxi Annual Precipitation 800–1,600 mm Official Government www.hubei.gov.cn URL Note: Personnel information as of September 2014 [Economic Scale] Unit 2012 2013 National Share (%) Ranking Gross Domestic Product (GDP) 100 Million RMB 22,250 24,668 9 4.3 Per Capita GDP RMB 38,572 42,613 14 - Value-added Industrial Output (enterprises above a designated 100 Million RMB 9,552 N.A. N.A. N.A. size) Agriculture, Forestry and Fishery 100 Million RMB 4,732 5,161 6 5.3 Output Total Investment in Fixed Assets 100 Million RMB 15,578 20,754 9 4.7 Fiscal Revenue 100 Million RMB 1,823 2,191 11 1.7 Fiscal Expenditure 100 Million RMB 3,760 4,372 11 3.1 Total Retail Sales of Consumer 100 Million RMB 9,563 10,886 6 4.6 Goods Foreign Currency Revenue from Million USD 1,203 1,219 15 2.4 Inbound Tourism Export Value Million USD 19,398 22,838 16 1.0 Import Value Million USD 12,565 13,552 18 0.7 Export Surplus Million USD 6,833 9,286 12 1.4 Total Import and Export Value Million USD 31,964 36,389 17 0.9 Foreign Direct Investment No.