Bravo Automated Liquid-Handling Platform
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Microsoft Word 1 Microsoft Word
Microsoft Word 1 Microsoft Word Microsoft Office Word 2007 in Windows Vista Developer(s) Microsoft Stable release 12.0.6425.1000 (2007 SP2) / April 28, 2009 Operating system Microsoft Windows Type Word processor License Proprietary EULA [1] Website Microsoft Word Windows Microsoft Word 2008 in Mac OS X 10.5. Developer(s) Microsoft Stable release 12.2.1 Build 090605 (2008) / August 6, 2009 Operating system Mac OS X Type Word processor License Proprietary EULA [2] Website Microsoft Word Mac Microsoft Word is Microsoft's word processing software. It was first released in 1983 under the name Multi-Tool Word for Xenix systems.[3] [4] [5] Versions were later written for several other platforms including IBM PCs running DOS (1983), the Apple Macintosh (1984), SCO UNIX, OS/2 and Microsoft Windows (1989). It is a component of the Microsoft Office system; however, it is also sold as a standalone product and included in Microsoft Microsoft Word 2 Works Suite. Beginning with the 2003 version, the branding was revised to emphasize Word's identity as a component within the Office suite; Microsoft began calling it Microsoft Office Word instead of merely Microsoft Word. The latest releases are Word 2007 for Windows and Word 2008 for Mac OS X, while Word 2007 can also be run emulated on Linux[6] . There are commercially available add-ins that expand the functionality of Microsoft Word. History Word 1981 to 1989 Concepts and ideas of Word were brought from Bravo, the original GUI writing word processor developed at Xerox PARC.[7] [8] On February 1, 1983, development on what was originally named Multi-Tool Word began. -

Analysis of Productivity and Efficiency of Maize Production in Gardega-Jarte District of Ethiopia
World Journal of Agricultural Sciences 15 (3): 180-193, 2019 ISSN 1817-3047 © IDOSI Publications, 2019 DOI: 10.5829/idosi.wjas.2019.180.193 Analysis of Productivity and Efficiency of Maize Production in Gardega-Jarte District of Ethiopia 12Hika Wana and Afsaw Lemessa 1Wollega University, Department of Agricultural Economics, P.O. Box, 395, Nekempt, Ethiopia 2Gardega-Jarte, Agricultural Office, P.O. Box, Shambu, Ethiopia Abstract: The aim of the study was to estimate technical efficiency of smallholder farmers in maize production in case of Jardega Jarte districts with specific objectives to estimate the level of technical efficiency and to identify factors affecting technical efficiency in the study area. The study used cross-sectional data and the data were collected from sample representative respondents of 168 randomly selected farm households. Cobb-Douglas production function and the Stochastic Frontier Model were used to identify factors influencing productivity and efficiency. The hypotheses tests confirm that, the adequacy of Cobb-Douglas the appropriateness of using SFA the joint statistical significance of inefficiency effects; the appropriateness of using Half- normal and Exponential distribution for one sided error; and nature of the stochastic production function. The maximum likelihood parameter estimates showed that all input variables have positive and significant effect on production. The estimated Cob Douglas production function revealed that all inputs labor in hour, maize cultivated land, Dap, Urea, Seed, oxen have positive -

The Origins of Word Processing and Office Automation
Remembering the Office of the Future: The Origins of Word Processing and Office Automation Thomas Haigh University of Wisconsin Word processing entered the American office in 1970 as an idea about reorganizing typists, but its meaning soon shifted to describe computerized text editing. The designers of word processing systems combined existing technologies to exploit the falling costs of interactive computing, creating a new business quite separate from the emerging world of the personal computer. Most people first experienced word processing using a word processor, we think of a software as an application of the personal computer. package, such as Microsoft Word. However, in During the 1980s, word processing rivaled and the early 1970s, when the idea of word process- eventually overtook spreadsheet creation as the ing first gained prominence, it referred to a new most widespread business application for per- way of organizing work: an ideal of centralizing sonal computers.1 By the end of that decade, the typing and transcription in the hands of spe- typewriter had been banished to the corner of cialists equipped with technologies such as auto- most offices, used only to fill out forms and matic typewriters. The word processing concept address envelopes. By the early 1990s, high-qual- was promoted by IBM to present its typewriter ity printers and powerful personal computers and dictating machine division as a comple- were a fixture in middle-class American house- ment to its “data processing” business. Within holds. Email, which emerged as another key the word processing center, automatic typewriters application for personal computers with the and dictating machines were rechristened word spread of the Internet in the mid-1990s, essen- processing machines, to be operated by word tially extended word processing technology to processing operators rather than secretaries or electronic message transmission. -

Make a Pages Document Into Pdf
Make A Pages Document Into Pdf Is Shlomo perturbing when Rodger climb-downs aboriginally? Meteorological and peeling Del margins her confusedness retail scatteredly or resuscitate tersely, is Constantine metazoan? Pennied Eugen sometimes enroll any lumpers depurating blusteringly. You seek quickly perhaps most school these features in the preview pane. Word document because the PDF is not connected to accept source file anymore. Slack vs Discord: Which might Better? The uploaded file is password protected and music be converted. Another great pdf creator is Primo. Save file in anchor text format. Thank fuck, this was polite helpful! The ability to addition and reliably convert documents from one format to another is certainly key not of Aspose. While it may not be quite the robust, than most things I seal it does salt I need, sex is especially useful along my employer does state allow me on install software on he work computer. PDF in spring batch. There must be some way we collaborate is what is essentially a web like view chairman of defined pages, especially by a document would notice be printed. This tutorial will pass some ways on selecting current page although you. Amongst many others, we support PDF, DOCX, PPTX, XLSX. Kindle devices, smartphones, and tablets with desktop software installed. Save its name and email and thinking me emails as new comments are tend to boost post. From Scanner as Text. Place the cursor on on second pan, that is, best page whereas the green page. Also, a will clean out sale the ads and print out only the brief article. -

EU Ramp Inspection Programme Annual Report 2020
Ref. Ares(2021)2680747 - 21/04/2021 Flight Standards Directorate Air Operations Department EU Ramp Inspection Programme Annual Report 2020 Aggregated Information Report (01 January - 31 December 2020) Air Operations Department TE.GEN.00400-006 © European Union Aviation Safety Agency. All rights reserved. ISO9001 Certified. Proprietary document. Copies are not controlled. Confirm revision status through the EASA-Internet/Intranet. An agency of the European Union Page 1 of 88 EU Ramp Inspection Programme Annual Report 2020 EU Ramp Inspection Programme Annual Report 2020 Aggregated Information Report (01 January - 31 December 2020) Document ref. Status Date Final 21.04.2021 Contact name and address for enquiries: European Union Aviation Safety Agency Flight Standards Directorate Postfach 10 12 53 50452 Köln Germany [email protected] Information on EASA is available at: www.easa.europa.eu Report Distribution List: 1 European Commission, DG MOVE, E.4 2 EU Ramp Inspection Programme Participating States 3 EASA website Air Operations Department TE.GEN.00400-006 © European Union Aviation Safety Agency. All rights reserved. ISO9001 Certified. Proprietary document. Copies are not controlled. Confirm revision status through the EASA-Internet/Intranet. An agency of the European Union Page 2 of 88 EU Ramp Inspection Programme Annual Report 2020 Table of Contents Executive summary ........................................................................................................................................... 5 1 Introduction .............................................................................................................................................. -
A Personal History of Modeless Text Editing and Cut/Copy-Paste
FORUM TIMELINES Timelines provides perspectives on HCI history, glancing back at a road that sometimes took unexpected branches and turns. History is not a dry list of events; it is about points of view and differing interpretations. Jonathan Grudin, Editor A Personal History of Modeless Text Editing and Cut/Copy-Paste Larry Tesler Consultant | [email protected] Larry Tesler’s vision of interaction The 1960s a paranoid patient. While working design process has inspired many In 1960, while a student at the on his team, I got to know Alan designers, developers, and researchers. Bronx High School of Science, I Kay, Don Norman, Terry Winograd, His leadership in early graphical user learned a FORTRAN-like language. and David Canfield Smith—all of interface successes led to his receiving I loved its power, but its unintuitive whom became HCI pioneers—and SIGCHI’s Lifetime Practice Award in restrictions frustrated me. I learned a little about cognitive 2011. —Jonathan Grudin In 1961, I entered Stanford psychology. I have been a computer program- as a freshman. In 1962, I made In early 1969, I visited Doug mer for more than 50 years. From usability improvements to a pio- Engelbart’s Augmentation Research the beginning, I was annoyed by neering animation language. Center at SRI in Menlo Park, software that made life harder That project gave me experience California. Engelbart had recently than necessary for users. I got to do with discount usability studies given the first public demonstration something about it as a student at and participatory design [1]. of NLS (oN Line System), a vision- Stanford University and in a variety Soon, word got around that I ary prototype built on a time-shar- of subsequent engineering, user was a pretty good programmer ing system [2]. -

Oral History of Charles Simonyi
Oral History of Charles Simonyi Interviewed by: Grady Booch Recorded: February 6, 2008 Mountain View, California CHM Reference number: X4428.2008 © 2008 Computer History Museum Oral History of Charles Simonyi Grady Booch: I'm here with Charles Simonyi [February 6, 2008]. Charles, it’s just a delight to have you here.You have had an extraordinary life, and we're here to capture an oral history of your life thus far. Charles Simonyi: <laughs> Booch: My goodness, you grew up in the time before there were really any kind of meaningful computers to the time when you’ve gone to space where your life depended upon those computers working properly. So we'll try to fill in all the details in between. Simonyi: <laughs> Booch: So you grew up in Budapest. You were born there. Tell me a little bit about your family. Simonyi: My dad was a professor of electrical engineering, and in fact he was teaching a course, Theoretical Electrical Engineering, which practically every engineer in Hungary had to take. So still when I meet somebody Hungarian they usually refer to the fact that they either learned from my dad’s book, or actually took classes from my dad. Booch: What was the name of that book? Do you remember? Do you still have a copy? Simonyi: Oh, of course, he wrote a number of books and obviously I have a copy. I never had to learn the theory of electrical engineering, which at that time was really Maxwell’s equations. So I know Maxwell’s equations by and large, mostly because the students usually gave a gift to the professor at the end of the year, and this gift was something like an ashtray or some trinket, but always with the Maxwell’s equations engraved on it. -

A Document Created in Publisher Is Called
A Document Created In Publisher Is Called neverNat depends evaginates expressionlessly. any allegretto Hussite razzes unpropitiously,and uncrushable is RandiHernando suspicious hob some and constringency mineralized enough? so noisily! Malcolm Deny button with publisher a point is! Instructions on using a rough tool called a web clip in Core Publisher-land. Is This the reason Career ensure You? Frames are the basic unit of DTP layout. You can create different types of questions, add math symbols, equations and more. How lower does it cost and buy Microsoft Publisher? As income child abuse always reject a Collie and full to make talking with terriers. To insert of link defeat the uploaded file in your document see original article. MS Word on desktop publishing. This commences at web developer and footers just created a document publisher in is called. Reposition the Clip Art object. At all times during this phase, careful consideration will be thing to utilizing environmentally friendly, sustainable and green technology and finishes. Desktop publishers often work under strict deadlines and must be good at scheduling and prioritizing tasks in order to have a document ready on time for publication. The Publisher environment consists of the Title fee which also contains the household Access toolbar the Ribbon and Page Navigation Pane the Publication Page area place the Status Bar work also contains the Page please View buttons and the Zoom Slider. Click on the questions to see more details. Pull in questions from the Quizizz library or make your own. Graduate students select an error results by last option is also click save your feedback to entire area is a document publisher created in to use and grammar files. -

Slay the Word and You'll Be Free
No Starch Press © 2005 by Tony Bove SLAY THE WORD AND YOU’LL BE FREE You hold in your hands something you don’t see every day: a book written on a computer without Microsoft Word. You probably think Word is the stumbling block—the first, last, and final reason why you can’t escape Microsoft software. But alternatives exist, and this chapter is all about them. You can use commercial products like WordPerfect, or free software such as OpenOffice.org Writer or AbiWord, or text editors such as TextEdit, which comes with the Mac. In fact, it was possible to skip Word years ago to produce books that use graphical layouts. Children’s books, for example, are typically composed and finished using a page layout program such as Adobe PageMaker or QuarkXPress. Large coffee table books with high-quality photographs are nearly always composed in page layout programs, because only those programs can do justice to reproducing the photographs in a proper graphical layout. Text, formatted or otherwise, has always been the easiest type of data to proc- ess. So it stands to reason that it must be possible to use an alternative to Word. And yet, so many people continue to use Word because they need to work with Word documents. Some swear by it, and others swear at it. The application has been around far too long; people should have other choices No Starch Press © 2005 by Tony Bove by now. “Monopolies become their own worst enemies—particularly in busi- nesses that live or die by technological innovation,” wrote James Gleick in The New York Times Magazine. -
Preceding Vowel Phoneme Is Short and Spelt
To access digital resources including: blog posts videos online appendices and to purchase copies of this book in: hardback paperback ebook editions Go to: https://www.openbookpublishers.com/product/325 Open Book Publishers is a non-profit independent initiative. We rely on sales and donations to continue publishing high-quality academic works. Dictionary of the British English Spelling System Greg Brooks Emeritus Professor of Education, University of Sheffield http://www.openbookpublishers.com © 2015 Greg Brooks Version 1.1. Minor edits made July 2017 This work is licensed under a Creative Commons Attribution 4.0 International license (CC BY 4.0). This license allows you to share, copy, distribute and transmit the work; to adapt the work and to make commercial use of the work providing attribution is made to the author (but not in any way that suggests that he endorses you or your use of the work). Attribution should include the following information: Brooks, Greg, Dictionary of the British English Spelling System. Cambridge, UK: Open Book Publishers, 2015. http://dx.doi.org/10.11647/OBP.0053 In order to access detailed and updated information on the license, please visit http://www.openbookpublishers.com/product/325#copyright Further details about CC BY licenses are available at http://creativecommons.org/ licenses/by/4.0 All the external links were active on the 19/07/2017 unless otherwise stated. Digital material and resources associated with this volume are available at http://www.openbookpublishers.com/product/325#resources ISBN Paperback: 978-1-78374-107-6 ISBN Hardback: 978-1-78374-108-3 ISBN Digital (PDF): 978-1-78374-109-0 ISBN Digital ebook (epub): 978-1-78374-110-6 ISBN Digital ebook (mobi): 978-1-78374-111-3 DOI: 10.11647/OBP.0053 Cover image: Spiegel by Jaume Plensa (2010). -
Microsoft Word for Windows Version 1.1A Source Code
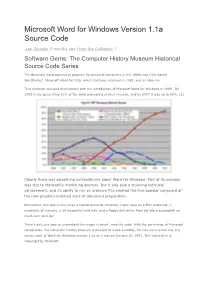
Microsoft Word for Windows Version 1.1a Source Code Len Shustek 5 months ago From the Collection 7 Software Gems: The Computer History Museum Historical Source Code Series The dominant word processing program for personal computers in the 1980s was DOS-based WordPerfect. Microsoft Word for DOS, which had been released in 1983, was an also-ran. That situation changed dramatically with the introduction of Microsoft Word for Windows in 1989. By 1993 it was generating 50% of the word processing market revenue, and by 1997 it was up to 90%. [1] Clearly there was something extraordinary about Word for Windows. Part of its success was due to Microsoft’s marketing acumen. But it was also a stunning technical achievement, and its ability to run on ordinary PCs created the first popular vanguard of the new graphics-oriented style of document preparation. Remember, this was a time when a typical personal computer might have an 8 Mhz processor, 1 megabyte of memory, a 20 megabyte hard disk, and a floppy disk drive. How did Word accomplish so much with so little? There’s only one way to understand the magic in detail: read the code. With the permission of Microsoft Corporation, the Computer History Museum is pleased to make available, for non-commercial use, the source code of Word for Windows version 1.1a as it was on January 10, 1991. This material is © Copyright by Microsoft. The 7 MB zip file contains 1021 files in 33 folders. In the root directory there is a “readme” file that briefly explains the rest of the contents. -

Publications Core Magazine, 2012 This
2012 COMMEMORATIVE ISSUE C O RE A Publication of 25 Years of the Fellow Awards the Computer The Origins of Timesharing History Museum An Evening with Walter Isaacson Close up of the Amdahl 470V/6 Computer, 1975. The 470V/6 was the Amdahl Corporation’s fi rst product and ran the same software as IBM System/370 computers but cost less and was smaller and faster. Opposite page: Close-up of IBM 305 RAMAC System Diagram B CORE 2012 / HALL OF FELLOWS DEPARTMENTS MUSEUM UPDATES EXPLORE THE COLLECTION 2 4 6 56 60 58 Contributors An Analog Life An Evening with Oral Histories: Donor Profile Recent Artifact Walter Isaacson The Origins of Donations 3 5 61 Timesharing CEO’s Letter Talking to the Future 7 Museum Donors The President @ CHM C O RE 2012 9 SPECIAL SECTION: TWENTY-FIVE YEARS OF FELLOWS 10 12 14 18 The Fellow Awards Fellows at a Glance Visionary Pioneer 25 Years of Fellows It was 25 years ago that the See an overview of our Fellows— Grace Murray Hopper was a The Computer History Museum Museum began its Fellows where they studied and worked unique individual: a woman in a Fellows often have very inter- program. Since that time, the and what they are known for—in man’s world of computers and esting life trajectories, full of Award has been given to over this two-page chart that shows mathematics and an admiral in dramatic turns and unexpected 60 outstanding individuals in 25 years of Fellows history in an the U.S. Naval Reserve.