Journal 7.1 Front Support.Pmd
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Szám Rendsz Teljes Név Épül Beszer Selejt Selejt Más
Szám Rendsz Teljes név Épül Beszer Selejt Selejt Más 08 1808 VP 06 Renault PR180 1986 1992 ? PR 180.2 10 1810 VP 06 Renault PR180 1986 1992 ? PR 180.2 11 1811 VP 06 Renault PR180 1986 1992 ? PR 180.2 13 1813 VP 06 Renault PR180 1986 1992 ? PR 180.2 15 1810 VP 06 Renault PR180 1986 1992 2005 2005 PR 180.2 12 1812 VP 06 Renault PR180 1986 1992 2005 2005 PR 180.2 14 5914 VP 06 Renault PR180 1986 1992 ? PR 180.2 19 219 VQ 06 Renault PR100 1986 1992 ? PR 100.2 18 218 VQ 06 Renault PR100 1986 1992 ? PR 100.2 16 216 VQ 06 Renault PR100 1986 1992 ? PR 100.2 09 1809 VP 06 Renault PR180 1986 1992 2006 PR 180.2 17 217 VQ 06 Renault PR100 1986 1992 2000 PR 100.2 28 828 VY 06 Renault PR180 1987 1992 ? PR 180.2 27 827 VY 06 Renault PR180 1987 1992 ? PR 180.2 29 829 VY 06 Renault PR180 1987 1992 ? PR 180.2 33 833 VY 06 Renault PR180 1987 1992 ? PR 180.2 30 830 VY 06 Renault PR180 1987 1992 ? PR 180.2 31 831 VY 06 Renault PR180 1987 1992 ? PR 180.2 32 832 VY 06 Renault PR180 1987 1992 ? PR 180.2 58 4758 WN 06 Renault R312 1988 1992 ? 57 1257 WN 06 Renault R312 1988 1992 ? 51 6251 WL 06 Renault PR180 1988 1992 ? PR 180.2 50 6250 WL 06 Renault PR180 1988 1992 ? PR 180.2 52 6252 WL 06 Renault PR180 1988 1992 ? PR180.2 53 6253 WL 06 Renault PR180 1988 1992 ? PR180.2 54 6254 WL 06 Renault PR180 1988 1992 ? PR180.2 55 155 WN 06 Renault R312 1988 1992 ? 64 164 WN 06 Renault R312 1988 1992 ? 63 163 WN 06 Renault R312 1988 1992 ? 62 4762 WN 06 Renault R312 1988 1992 ? 61 4761 WN 06 Renault R312 1988 1992 ? 60 4760 WN 06 Renault R312 1988 1992 ? 59 1259 WN 06 -

© Norwich Bus Page 2013 Norfolk Green Fleet List – 1 St December
© Norwich Bus Page 2013 Norfolk Green fleet List – 1st December 2013 Fleet No. Registration Chassis/Body Livery Name 1 YE52FHF DAF DB250LF Optare Spectra Norfolk Green Jamie Armstrong 2 YE52FHG DAF DB250LF Optare Spectra New Norfolk Green Reis L Leming 3 YG02FWE DAF DB250LF Optare Spectra Norfolk Green John Palmer 4 YG02FWB DAF DB250LF Optare Spectra Norfolk Green Horace The Tiger 5 YJ03UMK DAF DB250LF Optare Spectra Norfolk Green Frances Burney 6 YJ03UML DAF DB250LF Optare Spectra Norfolk Green Somerset Arthur Maxwell 7 YJ51ZVF DAF DB250LF Optare Spectra Norfolk Green George Vancouver 8 YJ51ZVG DAF DB250LF Optare Spectra New Norfolk Green Ted Martin 9 YG02FWD DAF DB250LF Optare Spectra New Norfolk Green Black Shuck 10 LV52HHP Alexander Dennis Trident ALX400 Norfolk Green John Colton 11 LV52HHR Alexander Dennis Trident ALX400 Norfolk Green Samuel Pepys 13 PX55AHF Dennis Trident East Lancs Myllenium Lolyne New Norfolk Green William D'Albini 14 PX55AHJ Dennis Trident East Lancs Myllenium Lolyne New Norfolk Green Jessie & George Ruhms 21 SN12EHM Alexander Dennis Enviro400 New Norfolk Green Johnny Douglas 22 SN12EHO Alexander Dennis Enviro400 New Norfolk Green William Henry Mann 23 SN13EEA Alexander Dennis Enviro400 New Norfolk Green -- 24 SN13EEB Alexander Dennis Enviro400 New Norfolk Green -- 101 YJ56WUG Optare X1200 Tempo New Norfolk Green Sir Peter Scott 102 YJ56WUH Optare X1200 Tempo Norfolk Green Frederick Savage 103 YJ57YCC Optare X1200 Tempo Norfolk Green Robert Stephenson 104 YJ57YCD Optare X1200 Tempo Norfolk Green Ruth, Lady Fermoy -

Modèle De Rapport Commercial
RAPPORT D’ÉTUDE 03/12/2009 N° DRC-09-104243-11651A INTER’MODAL Vers une meilleure maîtrise de l’exposition individuelle par inhalation des populations à la pollution atmosphérique lors de leurs déplacements urbains INTER’MODAL Vers une meilleure maîtrise de l’exposition individuelle par inhalation des populations à la pollution atmosphérique lors de leurs déplacements urbains Ministère de l’Ecologie, de l’Energie, du Développement Durable et de la Mer (MEEDDM) Bureau de l'Air & Bureau de la prospective et de l'évaluation des données Grande Arche de la Défense - Paris Nord 92055 PARIS LA DEFENSE CEDEX Liste des personnes ayant participé à l’étude : S.Fable, I.Fraboulet, F.Godefroy, G.Jantolek, J.Queron, B.Triart. DRC-09-104243-11651A - 1 / 117 - PRÉAMBULE Le présent rapport a été établi sur la base des informations fournies à l'INERIS, des données (scientifiques ou techniques) disponibles et objectives et de la réglementation en vigueur. La responsabilité de l'INERIS ne pourra être engagée si les informations qui lui ont été communiquées sont incomplètes ou erronées. Les avis, recommandations, préconisations ou équivalent qui seraient portés par l'INERIS dans le cadre des prestations qui lui sont confiées, peuvent aider à la prise de décision. Etant donné la mission qui incombe à l'INERIS de par son décret de création, l'INERIS n'intervient pas dans la prise de décision proprement dite. La responsabilité de l'INERIS ne peut donc se substituer à celle du décideur. Le destinataire utilisera les résultats inclus dans le présent rapport intégralement ou sinon de manière objective. -

Squaring the Circle: the Bhls Concept
SQUARING THE CIRCLE: THE BHLS CONCEPT María Eugenia López Lambas Associated Professor of Transport ETSI Caminos, Canales y Puertos –Universidad Politécnica de Madrid (UPM), Spain Cristina Valdés PhD Researcher Transyt-UPM, Spain ABSTRACT The transport system known as Bus Rapid Transit (BRT) was launched in Curitiba, Brazil, in 1974 as a means of offering efficient and effective bus travel within the fast expanding city. This experience, together with other such Ottawa (since 1983) or Quito (since 1994), has proven to be an efficient and effective solution to mass transport. Throughout Europe similar experiences have started to be developed, but addressing a different concept in terms of quality of service. Indeed, bus systems such as the “trunk network”, in Sweden, the Metrobus, in Germany, or the BHNS (Bus à Haut Niveau de Service in France), approach the quality of service from a wider perspective than the BRT, as it considers aspects such as image and comfort, apart from speed, frequency or reliability. These new systems - BHLS (Buses with a High Quality of Service) - allow to combine quality of service of tramways with the lower costs and higher flexibility of bus systems, offering very interesting solutions in terms of accessibility, as well as a wide range of service levels, that allows the system to be adapted to the different urban contexts (size, population, density , etc) The economic situation we are facing has beard a lack of funds that, at the end, means an opportunity for BHLS, called to play an important role in public transport: less costs with the same quality of service seems to be a very attractive option. -
Norfolk Green Fleet List UPDATED
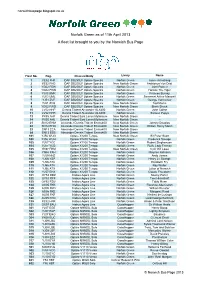
norwichbuspage.blogspot.co.uk Norfolk Green as of 11th April 2013 A fleet list brought to you by the Norwich Bus Page Fleet No. Reg. Chassis/Body Livery Name 1 YE52 FHF DAF DB250LF Optare Spectra Norfolk Green Jamie Armstrong 2 YE52 FHG DAF DB250LF Optare Spectra New Norfolk Green Andrianus Van Driel 3 YG02 FEW DAF DB250LF Optare Spectra Norfolk Green John Palmer 4 YG02 FWB DAF DB250LF Optare Spectra Norfolk Green Horace The Tiger 5 YJ03 UMK DAF DB250LF Optare Spectra Norfolk Green Frances Burney 6 YJ03 UML DAF DB250LF Optare Spectra Norfolk Green Somerset Arthur Maxwell 7 YJ51 ZVF DAF DB250LF Optare Spectra Norfolk Green George Vancouver 8 YJ51 ZVG DAF DB250LF Optare Spectra New Norfolk Green Ted Martin 9 YG02 FWD DAF DB250LF Optare Spectra New Norfolk Green Black Shuck 10 LV52 HHP Dennis Trident Alexander ALX400 Norfolk Green John Colton 11 LV52 HHR Dennis Trident Alexander ALX400 Norfolk Green Samuel Pepys 13 PX55 AHF Dennis Trident East Lancs Myllenium New Norfolk Green -- 14 PX55 AHJ Dennis Trident East Lancs Myllenium New Norfolk Green -- 21 SN12 EHM Alexander Dennis Trident Enviro400 New Norfolk Green Johnny Douglas 22 SN12 EHO Alexander Dennis Trident Enviro400 New Norfolk Green William Henry Mann 23 SN13 EEA Alexander Dennis Trident Enviro400 New Norfolk Green -- 24 SN13 EEB Alexander Dennis Trident Enviro400 New Norfolk Green -- 101 YJ56 WUG Optare X1200 Tempo New Norfolk Green Sir Peter Scott 102 YJ56 WUH Optare X1200 Tempo Norfolk Green Frederick Savage 103 YJ57 YCC Optare X1200 Tempo Norfolk Green Robert Stephenson 104 YJ57 -

POUR Un TROLLEYBUS MODERNE Dans L'agglomération Grenobloise
POUR un TROLLEYBUS MODERNE dans l’agglomération grenobloise « Le trolleybus, un moyen de transport durable et performant, quand on le crédite du coût des nuisances évitées » ADTC – janvier 2005 Sommaire Les avantages du trolleybus par rapport à l’autobus : 1. Le trolleybus, un moyen de transport performant 2. Le trolleybus est un moyen de transport non polluant 3. Le trolleybus, un moyen de transport rentable Quelques réponses que l’on peut apporter aux personnes qui se posent la question de la pertinence du retour du trolleybus dans notre agglomération. 1. Le coût du trolleybus 2. L'image du trolleybus 3. La pollution visuelle 4. Existe-t-il des constructeurs européens ? 5. Les installations grenobloises existantes sont-elles réutilisables ? 6. Quelles lignes de bus transformer en lignes de trolleybus à Grenoble ? Pour un trolleybus moderne Page 1 sur 11 dans l’agglomération grenobloise janvier 2005 Les avantages du trolleybus par rapport à l’autobus : 1. Le trolleybus, un moyen de transport performant Grâce à ses caractéristiques, le trolleybus s’inscrit totalement dans le concept de Bus à Haut Niveau de Service (BHNS) Accélération : le trolleybus est plus rapide en accélération, grâce à un couple de démarrage constant (pas d’embrayage, ni de renvoi d’angle, ni de boîte à vitesses) : en 15 secondes, il parcourt 30 % de distance en plus que le bus diesel, ce qui autorise un parc trolleybus inférieur de 7% à un un parc d’autobus offrant le même service. Pentes : le trolleybus est le véhicule de transports en commun le plus adapté pour gravir les pentes (telles celles de La Tronche, de Meylan et de Saint- Martin le Vinoux). -

INTER'modal Vers Une Meilleure Maîtrise De L'exposition Individuelle
RAPPORT D’ÉTUDE 03/12/2009 N° DRC-09-104243-11651A INTER’MODAL Vers une meilleure maîtrise de l’exposition individuelle par inhalation des populations à la pollution atmosphérique lors de leurs déplacements urbains INTER’MODAL Vers une meilleure maîtrise de l’exposition individuelle par inhalation des populations à la pollution atmosphérique lors de leurs déplacements urbains Ministère de l’Ecologie, de l’Energie, du Développement Durable et de la Mer (MEEDDM) Bureau de l'Air & Bureau de la prospective et de l'évaluation des données Grande Arche de la Défense - Paris Nord 92055 PARIS LA DEFENSE CEDEX Liste des personnes ayant participé à l’étude : S.Fable, I.Fraboulet, F.Godefroy, G.Jantolek, J.Queron, B.Triart. DRC-09-104243-11651A - 1 / 119 - PRÉAMBULE Le présent rapport a été établi sur la base des informations fournies à l'INERIS, des données (scientifiques ou techniques) disponibles et objectives et de la réglementation en vigueur. La responsabilité de l'INERIS ne pourra être engagée si les informations qui lui ont été communiquées sont incomplètes ou erronées. Les avis, recommandations, préconisations ou équivalent qui seraient portés par l'INERIS dans le cadre des prestations qui lui sont confiées, peuvent aider à la prise de décision. Etant donné la mission qui incombe à l'INERIS de par son décret de création, l'INERIS n'intervient pas dans la prise de décision proprement dite. La responsabilité de l'INERIS ne peut donc se substituer à celle du décideur. Le destinataire utilisera les résultats inclus dans le présent rapport intégralement ou sinon de manière objective. -

Reiseberichte
Seite Informationen rund um den Obus informations about trolleybuses 8.58 Reiseberichte Kurztrip nach Cluj-Napoca 27.10.-29.10.2014 Anfang Oktober konnte ich einen Flug nach Cluj für 45 hin und zurück buchen Der WIZZ-Air-Flug startete am Montag Nachmittag ab Dortmund um 14:30 Uhr, die Ankunft erfolgte zwei .tunden sp0ter, bei einer Ortszeit 1on einer .tunde mehr, somit 12:30 Uhr Als ich die Endhaltestelle der Trolleybuslinie 5 erreichte fuhr gerade der Irisbus 158 ab .omit hatte ich Zeit, eine Tageskarte zu kaufen, es gelang jedoch nur mit 6bersetzungshilfe durch einen ebenfalls wartenden Fahrgast Die 7altestelle am Flughafen ist wie fast jede 7altestelle im .tadtgebiet mit zumeist weiblich besetzten Fahrkarten1erkaufsh0uschen ausgestattet An den Endhaltestellen melden sich die Fahrer bei den Fahrschein1erk0uferinnen, die offensichtlich dann die Abfahrt in Unterlagen best0tigen Es sind jedoch 8orbereitungen für das Aufstellen 1on Fahrkartenautomaten im 9ange, an der 7altestelle am Flughafen war ein Automat bereits aufgestellt, offensichtlich ist eine Umstellung des Fahrschein1erkaufs geplant Der :auf der Tageskarte erfolgt nur gegen 8orlage des Personalausweises, dessen Nummer auf der Rückseite des Fahrscheins handschriftlich 1ermerkt wird: Bis zum n0chsten Trolleybus der Linie 5 1erging eine lange Wartezeit in der :0lte, im 9egensatz zum milden End- Oktober-Wetter in Deutschland waren es in Rum0nien nur 8? Der n0chste Trolleybus ging erst 18:12 Uhr, die 2013 erAffnete Linie 5 führte bis Bahnhof, jedoch lag das gebuchte 7otel nicht an -

HD Catalogue Cover
The Power of Excellence Bus & Coach Stadt- und Reisebusse Bus et Autocars Buses y Automóviles PP4042 Rev: 1 (0111) 2011 OUR COMPANY Prestolite is a rapidly expanding global company with manufacturing and distribution in North and South America, Europe and Asia. Having research and development facilities in each of these locations, the company combines the engineering know-how and manufacturing expertise of Lucas CAV, Leece-Neville, Butec and Motorola, to produce the best starters and alternators range in the market. OUR BRANDS Effective from mid 2007 you will see that all of our products are dual branded ‘Prestolite’ and ‘Leece-Neville’. We think it’s important that our customers are able to make the link between these two great brands and it’s a reminder that all ‘Leece-Neville’ products are available from Prestolite – and vice versa! OUR PRODUCTS We offer a complete range of Heavy, Medium and Light Duty starters and alternators covering all major European Truck, Car and Van applications as well as comprehensive Bus & Coach, Off-Highway, Agricultural, Marine and Industrial application coverage. Look out for our new Refrigeration Equipment and Marine catalogues coming soon! OUR UNIQUE OFFER Remember that the vast majority of a range comes to you BRAND NEW. Of course this offers you OE quality levels, no availability problems due to core shortages but also the advantage of NO CORE SURCHARGES! How many times have you sold an alternator or starter only to have your profit wiped out because your supplier won’t accept your core? With Prestolite you can simply sell and forget. -
Contactless Magnetic Brake for Automotive
CONTACTLESS MAGNETIC BRAKE FOR AUTOMOTIVE APPLICATIONS A Dissertation by SEBASTIEN EMMANUEL GAY Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY May 2005 Major Subject: Electrical Engineering CONTACTLESS MAGNETIC BRAKE FOR AUTOMOTIVE APPLICATIONS A Dissertation by SEBASTIEN EMMANUEL GAY Submitted to Texas A&M University in partial fulfillment of the requirements for the degree of DOCTOR OF PHILOSOPHY Approved as to style and content by: _____________________________ _____________________________ Mehrdad Ehsani Hamid Toliyat (Chair of Committee) (Member) _____________________________ _____________________________ Shankar Bhattacharyya Mark Holtzapple (Member) (Member) _____________________________ Chanan Singh (Head of Department) May 2005 Major Subject: Electrical Engineering iii ABSTRACT Contactless Magnetic Brake for Automotive Applications. (May 2005) Sebastien Emmanuel Gay, Dipl. of Eng., Institut National Polytechnique de Grenoble; M.S., Texas A&M University Chair of Advisory Committee: Dr. Mehrdad Ehsani Road and rail vehicles and aircraft rely mainly or solely on friction brakes. These brakes pose several problems, especially in hybrid vehicles: significant wear, fading, complex and slow actuation, lack of fail-safe features, increased fuel consumption due to power assistance, and requirement for anti-lock controls. To solve these problems, a contactless magnetic brake has been developed. This concept includes a novel flux-shunting -

Transmission Et Embrayage TRANSMISSION ET EMBRAYAGE
> Transmission et embrayage TRANSMISSION ET EMBRAYAGE 8 - transmission embrayge ATS 2015 ok.indd 675 25/09/2015 16:14 Boîte de vitesse Boîte de vitesse > transmission et EMBRAYAGE Boîtes de vitesse ZF, Mercedes, Renault, Praga échange standard SUR SIMPLE APPEL 676 8 - transmission embrayge ATS 2015 ok.indd 676 25/09/2015 16:14 Boîte de vitesse Pièces périphériques de boîte de vitesse > transmission et EMBRAYAGE Bova RÉF ATS DÉSIGNATION APPLICATION 67098 Actionneur boîte de vitesse Bova Futura Boîte ZF 6S1600 RÉF ATS DÉSIGNATION APPLICATION 70421 Actionneur boîte de vitesse Bova Futura, Magiq Boîte ZF 8S180 RÉF ATS DÉSIGNATION APPLICATION 64870 Vérin boîte de vitesse Bova Futura Boîte ZF RÉF ATS DÉSIGNATION APPLICATION 67579 Vérin supérieur boîte de vitesse Bova Futura Boîte ZF Iveco/Irisbus RÉF ATS DÉSIGNATION APPLICATION 71019 Électrovanne de boîte ZF Irisbus Arway, Domino, Eurorider 38/45 RÉF ATS DÉSIGNATION APPLICATION 66031 Électrovanne de boîte ZF commande Irisbus Intarder Mercedes RÉF ATS DÉSIGNATION APPLICATION 69895 Électrovanne de commande Evobus Setra série 400, Mercedes Travego, Tourismo, Integro Boîte GO170, GO190, GO120, GO4-160 RÉF ATS DÉSIGNATION APPLICATION 69894 Électrovanne de commande Evobus Setra série 400, Mercedes Travego, Tourismo, Integro Boîte GO170-6, GO190-6, GO210-6, GO230-6 RÉF ATS DÉSIGNATION APPLICATION TRANSMISSION 71145 Vanne proportionnelle de Voith R120, Evobus Setra 315 UL Euro 3, 415-417 GTHD, ET EMBRAYAGE R115 Mercedes Integro, Intouro, Tourismo Boîte Mercedes GO190-6, GO240-8 677 8 - transmission -

Le Mag N°25 – Juin 2005 PR180 En Test Sur La Ligne 12 – Juillet 1982
PR180 en test sur la ligne 12 – juillet 1982 Le Mag n°25 – Juin 2005 L’éternelle pourquoi ? Car elle a su conserver son tracé originel. Son itinéraire actuel est quasiment identique à celui qu’empruntaient jadis les tramways. La ligne 12 est donc un exemple de longévité ! Mais la ligne 12 n’est pas seule : elle a une petite sœur qui, elle, a eu une vie tumultueuse et pleine de rebondissements. Création 1888 : Bellecour – St Fons .Tramways à traction vapeur « Lamm & Francq » 1889 : Bellecour – St Fons – Vénissieux 1895 : Electrification (motrices Buire à impériale dites « Belles-Mères ») 1930 (à partir de) : Motrices type « Lyon » 1937 : Fin de concession OTL, reprise de la Ligne par la Cie Lafond (autobus ZPDF) 1939 : Reprise par OTL. : motrices « Buire Croix Rousse » 1944 : Motrices Buire standards 1949 : Autobus Berliet PCK et création service 12B pour La Borelle (future ligne 35) 1953 : Autobus Berliet PCK et PCR 1955 : Autobus Berliet PBR 1963 : Création service 12C (Les Clochettes) : future ligne 60 1967 : Création navette M : Vénissieux – les Minguettes (PH 80) jusqu’en : 1968 : Prolongement de Vénissieux centre à Minguettes centre et des partiels St Fons à Grand Chassagnon 1969 : Passage à 1 agent avec Autobus Berliet PCM (série 1200) et prolongement des services Grand Chassagnon à Minguettes Sud 1976 : Saviem SC10 (série 2400) et self-service 1980 : Renault SC10 (série 3600) 1982 : prolongement de l’antenne Minguettes-centre à Minguettes –sud qui prend le nom de Minguettes-Darnaise et création de la ligne express 90 qui reprend les services passant par Grand-Chassagnon 1993 : La ligne 90 prend le numéro 12E parcours Bellecour-St Fons puis Bellecour-Minguettes Darnaise en 1994.