Enabling Technologies for Personal Aerial Transportation Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1954 Aerocar One
1954 Aerocar One Aerocar International's Aerocar (often called the Taylor Aerocar ) was an American roadable aircraft, designed and built by Moulton Taylor in Longview, Washington, in 1949. Although six examples were built, the Aerocar never entered production. Design and development Taylor's design of a roadable aircraft dates back to 1946. During a trip to Delaware, he met inventor Robert E. Fulton, Jr., who had designed an earlier roadable airplane, the Aerophobia. Taylor recognized that the detachable wings of Fulton’s design would be better replaced by folding wings. His prototype Aerocar utilized folding wings that allowed the road vehicle to be converted into flight mode in five minutes by one person. When the rear license plate was flipped up, the operator could connect the propeller shaft and attach a pusher propeller. The same engine drove the front wheels through a three-speed manual transmission. When operated as an aircraft, the road transmission was simply left in neutral (though backing up during taxiing was possible by the using the reverse gear.) On the road, the wings and tail unit were designed to be towed behind the vehicle. Aerocars could drive up to 60 miles per hour and have a top airspeed of 110 miles per hour. Testing and certification Civil certification was gained in 1956 under the auspices of the Civil Aeronautics Administration (CAA), and Taylor reached a deal with Ling-Temco-Vought for serial production on the proviso that he was able to attract 500 orders. When he was able to find only half that number of buyers, plans for production ended, and only six examples were built, with one still flying as of 2008 and another rebuilt by Taylor into the only Aerocar III. -
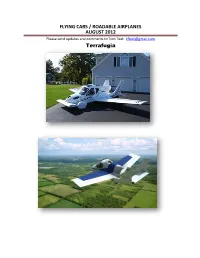
FLYING CARS / ROADABLE AIRPLANES AUGUST 2012 Please Send Updates and Comments to Tom Teel: [email protected] Terrafugia
FLYING CARS / ROADABLE AIRPLANES AUGUST 2012 Please send updates and comments to Tom Teel: [email protected] Terrafugia INTERNATIONAL FLYING CAR ASSOCIATION http://www.flyingcarassociation.com We'd like to welcome you to the International Flying Car Association. Our goal is to help advance the emerging flying car industry by creating a central resource for information and communication between those involved in the industry, news networks, governments, and those seeking further information worldwide. The flying car industry is in its formative stages, and so is IFCA. Until this site is fully completed, we'd like to recommend you visit one of these IFCA Accredited Sites. www.flyingcars.com www.flyingcarreviews.com www.flyingcarnews.com www.flyingcarforums.com REFERENCE INFORMATION Roadable Times http://www.roadabletimes.com Transformer - Coming to a Theater Near You? http://www.aviationweek.com/Blogs.aspx?plckBlo PARAJET AUTOMOTIVE - SKYCAR gId=Blog:a68cb417-3364-4fbf-a9dd- http://www.parajetautomotive.com/ 4feda680ec9c&plckController=Blog&plckBlogPage= In January 2009 the Parajet Skycar expedition BlogViewPost&newspaperUserId=a68cb417-3364- team, led by former British army officer Neil 4fbf-a9dd- Laughton and Skycar inventor Gilo Cardozo 4feda680ec9c&plckPostId=Blog%253aa68cb417- successfully completed its inaugural flight, an 3364-4fbf-a9dd- incredible journey from the picturesque 4feda680ec9cPost%253a6b784c89-7017-46e5- surroundings of London to Tombouctou. 80f9- Supported by an experienced team of overland 41a312539180&plckScript=blogScript&plckElement -
Future of Vertical Flight
www.vtol.org Kenneth Swartz, Regional Director – Americas The Vertical Flight Society www.vtol.org | [email protected] Kitty Hawk Cora © Vertical Flight Society: CC-BY-SA 4.0 © Vertical Flight Society: CC-BY-SA 4.0 Released March 2018 1 www.vtol.org . Founded as “The American Helicopter Society, Inc.” 75 years ago in Connecticut on Feb. 25, 1943 – “For the purpose of collecting, compiling and disseminating information concerning the helicopter” – Sikorsky Aircraft received its order for the first American helicopters on January 5, 1943 (28 XR-4 helicopters) . The first and longest-serving helicopter non-profit Sikorsky XR-4 helicopter – Founding members Igor Sikorsky, Arthur Young, Frank Piasecki, Courtesy of Sikorsky Aircraft Corp. Stanley Hiller, Reggie Brie, A.A. Griffiths, etc. – Included engineers, pilots, operators and presidents from industry, academia and government in Allied countries . Now 6,000 individual and 95 corporate members . Advancing vertical flight worldwide First Annual AHS Awards Banquet Born with the American Helicopter Industry Oct. 7, 1944 © Vertical Flight Society: CC-BY-SA 4.0 2 www.vtol.org © Vertical Flight Society: CC-BY-SA 4.0 3 www.vtol.org . The international professional society for those working to advance vertical flight – Founded in 1943 as the American Helicopter Society – Everything from VTOL MAVs/UAS to helicopters and eVTOL to STOVL (everything vertical except rockets) CFD of Joby S4, Aug 2015 . Expands knowledge about vertical flight technology and promotes its application around the world . Advances safety and acceptability . Advocates for vertical flight R&D funding . Helps educate and support today’s and tomorrow’s vertical flight engineers and leaders VFF Scholarship Winners at AHS Forum 71, May 2015 © Vertical Flight Society: CC-BY-SA 4.0 4 www.vtol.org . -

Motorgliding
Be with the in group Do your thing in the air Fly the RF-SB Sperber SPORT-AV/AT/ON WC. 401 HOLMES BL1/O. WOOSTER OF/10 44001 (8161 262-8301 MOTORGLIDING Donald P . Monroe, Editor Vol . 4, No . 8 Published by The Soaring Society of America, Inc . August 1974 Contents Page CONFESSIONS OF A MOTORGLIDER EATE R by Stephen du Pont 2 FOREIGN SCENE, by S . O . Jenko 8 SILVER DISTANCE IN A BUZZ BOMB by Frederick L . Jacobs 1 0 LETTERS 1 1 POSTFLIGHT NOTES 1 4 CLASSIFIED ADS 14 Cover : Nelson Riley, cavorting in his Schleicher AS-K 1 4 Motorgliding is published monthly by The Soaring Society of America, Inc ., whos e offices are at 3200 Airport Avenue, Room 25, Santa Monica, California 90405 . The mailing address is Box 66071, Los Angeles, California 90066 . Subscription to Motor- gliding is $5 .00 ($6 .00 outside of U .S .) for one year (12 issues), beginning wit h the current issue . Back issues are available at 50 each . Second-class postage paid at Santa Monica, California . Reproduction of any of the material printed i n Motorgliding, unless specifically excluded, is encouraged . Readers may wish to cor- respond directly with Harry N . Perl, Chairman, Powered Sailplane Committee, 390 7 California Way, Livermore, California 95440 ; or Richard Schreder, Chairman, Air- worthiness and Certification Committee, Box 488, Bryan, Ohio 43506 . ADVERTISING RATES, CONDITIONS AND SIZE S Display ads : $15 for 4 page ; $25 for ½ page and $40 for full page . Prices are for full-size, photo-ready copy . Extra charges for make-up, $3 .00 to $5 .00 ; reductions , $2 .00 ; and photos, $2 .50 . -

Auflage Nliste
"2//.."M/MN/.M//M.......ild /1 \ Informationsgemeinschaft / . 79 zur Feststellung der Verbreitung von Lül/4.-Y Y.• 1• \ Werbeträgern e.V. (IVW) 9 Tageszeitungen 118 Wochenzeitungen 121 Supplements 132 Publikumszeitschriften 181 Kundenzeitschriften 184 Fachzeitschriften 252 Analysen-Prüfung Fachzeitschriften 253 Kalender 254 Offertenblätter 256 Handbücher 258 Wirtschaftsnachschlagewerke 280 Branchen-Telefonbücher Gelbe Seiten AUFLAGE NLISTE Informationsgemeinschaft ~ zur Feststellung der Verbreitung von Werbeträgern e.V. (IVW) Herausgeber: Informationsgemeinschaft zur Feststellung der Verbreitung von Werbeträgern e. V. (IVW) Postfach 20 14 14 Alle Rechte vorbehalten. 53144 Bonn Nachdruck oder Vervielfältigung, Telefon (02 28) 8 20 92-50 auch auszugsweise, Telefax (02 28) 36 51 41 nur mit Genehmigung der IVW Erläuterungen SEITE : 002 Erscheinungsorte der Zeitungen , deren Titeln die Angabe dieses Ortes ABO-EX: abonnierte Exemplare; also Stücke für feste, zahlende Bezie- VERKAUF: die entgeltlich an Dritte abgegebenen Stücke nicht zu entnehmen ist, sind in einer einleitenden Übersicht zusammen- her, die geliefert werden an: DAVÌ.Z-ST: Lesezirkel (bei Kundenzeitschriften) gefaßt (s. Seite 4). 1. Ernpfänger, die den regulären Bezugspreis zahlen (Abonnenten) FREi-ST: alle unentgeltlich an Dritte abgegebenen Exemplare, jedoch 2. Buchhändler, die ohne Remissionsrecht für ihre Abonnenten bezie- keine Belegstücke IVW-Statistik hen, und werbenden Zeitschriftenhandel DRUCKAUFL : die Druckauflage ohne Makulatur ( bei Kundenzeitschriften Tabellarische Übersicht über die Auflagenzahlen je Gruppe; die Ergeb- 3. Mitglieder eines Vereins, wenn die Lieferung laut Impressum im Rah- und Kalendern) nisse des Berichtszeitraumes und des vorangegangenen Quartals sind men eines Mitgliedsbeitrages erfolgt ; diese Exemplare werden unter BINDEAUFL: Bindeauflage; die abgabefertig gebundenen Exemplare (bei gegenübergestellt (s. Seite 6); der Bezeichnung DAV MITGL zusätzlich gesondert ausgewiesen Handbüchern) graphische Darstellung der Entwicklung von Auflagenzahlen (s.Seite 7) 4. -

Basisdaten 2016 1
Verzeichnis der Tabellen und Grafiken Media Perspektiven Basisdaten 2016 1 Seite Rundfunk: Programmangebot und Empfangssituation TV-Haushalte nach Empfangsebenen in Deutschland 2016 4 Empfangspotenzial der deutschen Fernsehsender 2016 4 Öffentlich-rechtlicher Rundfunk: Erträge/Leistungen Rundfunkgebühren/Rundfunkbeitrag 6 Erträge aus der Rundfunkgebühr bzw. dem Rundfunkbeitrag 7 Werbefunkumsätze der ARD-Werbung 7 Werbefernsehumsätze von ARD und ZDF 7 Programmleistung der ARD 2015: Erstes Fernsehprogramm 8 Programmleistung von ARD und ZDF für KiKA und Phoenix 2015 8 Programmleistung von ARD und ZDF für Arte 2015 9 Programmleistung des ZDF 2015 9 Programmleistung von 3sat 2015 10 Programmleistung von Deutschlandradio 2015 10 Programmleistung der Deutschen Welle 2015 11 Programmleistung der ARD 2015: Hörfunk 11 Privater Rundfunk: Erträge/Leistungen Werbeumsätze privater Hörfunkanbieter 12 Bruttowerbeumsätze privater Fernsehanbieter 12 Programmleistung von RTL 2015 13 Programmleistung von ProSieben 2015 14 Programmleistung von Sat.1 2015 14 Programmleistung von VOX 2015 14 Programmleistung von Super RTL 2015 15 Programmleistung von RTL II 2015 15 Programmleistung von kabel eins 2015 16 Programmleistung von Sport1 2015 16 Programmprofile im dualen Rundfunksystem Spartenprofile von Das Erste, ZDF, RTL, Sat.1 und ProSieben 2013 bis 2015 17 Programmstruktur 2015: Sparten und Formen von Das Erste, ZDF, RTL, Sat.1 und ProSieben 19 Themenstruktur der wichtigsten Nachrichtensendungen von ARD, ZDF, RTL und Sat.1 22 Themenkategorien und ausgewählte -

The the Roadable Aircraft Story
www.PDHcenter.com www.PDHonline.org Table of Contents What Next, Slide/s Part Description Flying Cars? 1N/ATitle 2 N/A Table of Contents 3~53 1 The Holy Grail 54~101 2 Learning to Fly The 102~155 3 The Challenge 156~194 4 Two Types Roadable 195~317 5 One Way or Another 318~427 6 Between the Wars Aircraft 428~456 7 The War Years 457~572 8 Post-War Story 573~636 9 Back to the Future 1 637~750 10 Next Generation 2 Part 1 Exceeding the Grasp The Holy Grail 3 4 “Ah, but a man’s reach should exceed his grasp, or what’s a heaven f?for? Robert Browning, Poet Above: caption: “The Cars of Tomorrow - 1958 Pontiac” Left: a “Flying Auto,” as featured on the 5 cover of Mechanics and Handi- 6 craft magazine, January 1937 © J.M. Syken 1 www.PDHcenter.com www.PDHonline.org Above: for decades, people have dreamed of flying cars. This con- ceptual design appeared in a ca. 1950s issue of Popular Mechanics The Future That Never Was magazine Left: cover of the Dec. 1947 issue of the French magazine Sciences et Techniques Pour Tous featur- ing GM’s “RocAtomic” Hovercar: “Powered by atomic energy, this vehicle has no wheels and floats a few centimeters above the road.” Designers of flying cars borrowed freely from this image; from 7 the giant nacelles and tail 8 fins to the bubble canopy. Tekhnika Molodezhi (“Tech- nology for the Youth”) is a Russian monthly science ma- gazine that’s been published since 1933. -

Kapitel II: Konzentrationsentwicklung Im Privaten Rundfunk
Kapitel II Konzentrationsentwicklung im privaten Rundfunk 1 Bundesweites Fernsehen 1.1 Entwicklung des Programmangebots Bundesweit wurden in Deutschland zum Ende des ersten Halbjahres 2006 37 Free-TV- (davon acht Vollprogramme), 50 Pay-TV-Kanäle und zwei Programme im Handy-TV-Format ausgestrahlt. Weitere 59 Programme verfügten zwar über eine Sendelizenz, waren aber nicht auf Sendung. Diese Angaben basieren auf der von der KEK erstellten Programmliste 2006 (Stand: 30. Juni 2006), die gemäß § 26 Abs. 7 RStV jährlich zu aktualisieren und von den Landesmedienanstalten zu veröffentlichen ist (siehe unter http://www.alm.de/uploads/media/Programmliste_2006.pdf). In der Programmliste sind in alphabetischer Reihenfolge alle bundesweit lizenzierten privaten Fernsehsender sowie die Programmveranstalter und deren Beteiligte aufgeführt. Diese Angaben basieren auf Auskünften der Fernsehveranstalter und auf allgemein zugänglichen Quellen. Zudem sind auf der Website der KEK die Senderangaben sowie die Beteiligungsverhältnisse der Programm- veranstalter in ständig aktualisierter Form abrufbar (vgl. www.kek-online.de, Rubrik Medienkonzen- tration/Beteiligungsverhältnisse/Fernsehsender). Die Entwicklung der privaten bundesweiten Fernsehangebote im Zeitraum Juli 1998 bis Juli 2006 verdeutlicht Abbildung II–1. Dargestellt ist die Anzahl der jeweils veranstalteten Voll- und Spartenprogramme, die Anzahl der ausschließlich digital empfangbaren Spartenkanäle, der Pay- per-View-Angebote, Drittfensterprogramme und fernsehähnlichen Mediendienste, nicht aber die Anzahl der lokalen und regionalen Fernsehangebote. Die Anzahl der bundesweit veranstalteten Fernsehprogramme hat insbesondere in den Jahren 2003 bis 2006 kontinuierlich zugenommen und sich in diesen Zeiträumen nahezu verdoppelt. Anders ist die Entwicklung bei den Sendern bzw. Sendergruppierungen. Hier traten keine signifi- kanten Veränderungen ein. Bei Großveranstaltungen, wie z. B. der Fußball-Weltmeisterschaft 2006, hat das Public Viewing in besonderem Maße das öffentliche Interesse gefunden. -

Aerospace Division 2020
AEROSPACE DIVISION 2020 MOTOR PRESSE STUTTGART www.mps-vermarktung.de Aerospace Magazines 2 Effective January 1, 2020 FLUG REVUE 4 Advertising Sizes and Rates 6 Editorial and Closing Dates Calendar 8 AEROKURIER 10 Advertising Sizes and Rates 12 Editorial and Closing Dates Calendar 14 KLASSIKER DER LUFTFAHRT 16 Editorial and Closing Dates Calendar 17 Digital Media 18 Ad Specials 22 Technical Specifications 23 Contacts 24 SPECIALIZING IN PASSION THE AEROSPACE MAGAZINES OF MOTOR PRESSE STUTTGART 08 2019 Deutschland € 5,90 www.flugrevue.de 05/2019 Deutschland € 6,50 / Österreich € 7,40 / Schweiz sfr 10,80 / BeNeLux € 7,70 www.aerokurier.de / 63. Jahrgang 32 Seiten mehr! Große Jubiläumsausgabe Luftfahrt Jahre der 20 der Luftfahrt FLUG REVUE Das Luft- und Raumfahrt-Magazin aerokurier DAS MAGAZIN FÜR PILOTEN AIRBUS- FORSCHUNG Das Magazin für Luftfahrtgeschichte 07 | 2019 Spinnenseide für den Flugzeugbau Klassiker- Jubiläum Flugdiesel Gewinn-Aktion aktuelle Motoren auf der Hahnweide im Überblick Praxis: Fliegen mit Dieselantrieb Embraers neuer Jet MESSE- HIGHLIGHTS Urlaubs-Jet Mit der „Schildkröte” Pilot Report: Matto Neues Praetor 600 JUNKERS F 13 aus nach Hawaii Paris A380 im Auferstehung 6,80, 6,80, € TIGER MEET 7,60 Großübung € Amerika-Abenteuer in Frankreich Test 8,40, Italien 8,40, € Focke-Wulf Fw 190 der Legende BER APOLLO 11 Der Würger am Ärmelkanal Eröffnung Die 21 Stunden auf dem Mond Luxemburg Schweiz sfr 10,00, 6,60, in Gefahr? € Rekord-Jubiläum ABENTEUER IN RUSSLAND Österreich Parabelflug über dem Tschechien CZK 215,00, Niederlande -

APA-OTS-Reichweite DACH-Raum
DACH-Verteilerliste Deutschland (D) news aktuell GmbH .. Seite 2-13 Österreich (A) APA OTS Originaltext-Service GmbH . Seite 14-23 Schweiz (CH) news aktuell Schweiz AG . Seite 24-25 Fachverteiler Reise/Touristik in Deutschland ... Seite 26-27 Fachverteiler Reisen/Tourismus in Österreich . Seite 28-29 Fachverteiler Hotellerie/Tourismus in der Schweiz . Seite 30 Deutschland Nachrichtenagenturen 24 Tageszeitungen 159 Magazine/Wochenzeitungen 12 Bundespressekonferenz 50 Radio 202 TV 39 Politik 54 Pressestellen der Wirtschaft 61 Verbände und Organisationen 29 Verlage 17 Sonstige 7 Finanzinformationsdienste 5 Online (Auszug) 256 +themenbezogen an 130.000 persönliche E-Mail-Abonnements von Fachredakteuren, freien Journalisten und Branchen-Insidern Themen (Auszug): Abonnenten: Auto 1.900 Medien 4.500 Banken 900 Medizin/Pharma 1.600 Bildung 1.200 Politik 1.600 Börse 1.000 Soziales 1.600 Computer 1.500 Sport 1.100 DAX 500 Telekommunikation 3.200 Energie/Rohstoffe 1.500 Touristik 2.200 Fernsehen 2.000 Umwelt/Natur 1.900 Finanzen 1.200 Unterhaltung 1.400 Forschung/Wissenschaft 2.500 Verbände 1.300 Fussball 3.500 Verbraucher 2.000 Gesundheit/Medizin 3.900 Verlage/Bücher 1.500 Handel 1.100 Vermischtes 1.400 Internet 4.000 Wirtschaft 2.300 Kultur 1.800 Akkreditierungen unter: Lebensmittel 1.800 www.presseportal.de/emailabo.html + Archivierung im Presseportal www.presseportal.de Page Impressions Dezember 2008: 7,6 Mio (Quelle: IVW) Seite 2 Nachrichtenagenturen AFP - Agence France-Presse dpa-AFX Wirtschaftsnachrichten AFX News, London dpa-Themendienst Agence Belga S.A. (Belgien) EFE (Spanien) ANSA (Italien) epd - Evangelischer Pressedienst AP - The Associated Press Global Press (glp) APA (Österreich) JiJi-Press (Japan) AWP Agentur für Wirtschafts- KNA - Katholische Nachrichten- Publikationen, Schweiz Agentur ddp - Deutscher Depeschen Dienst Polska Agencja Prasowa S.A. -

When Will Cars Fly? Microtek Newsletter – April 2021
When will cars fly? Microtek Newsletter – April 2021 I know the title sounds funny but it is a reality that we are inventing flying cars right now. The demand is there (in so- many-ways) and the technology is advancing to allow it to become a reality. As of March 20, 2021 – there were 14 prototypes of flying cars in development. We will discuss what is being developed now and where our flying-car future may evolve to. There are many billionaires with large funds to help develop the prototypes of this technology. When you combine the potential future profits and the “bragging” rights, you will understand that billions of dollars are being spent now with billions more to be spent in the near future. I would like to illustrate the different types of “flying” cars we have now. WHAT IS A FLYING CAR The definition of a flying car is a vehicle that can drive on the road and fly in the air. There are two main types of flying cars. You have models that follow the principals of an airplane and models that follow the principals of a helicopter/drone. The difference is defined in the following way. Airplanes need a runway to reach a certain speed before it can leave the ground. Helicopters/drones can go straight up into the air without needing to reach a certain speed first. Helicopters have one or two sets of exposed blades. Drones have two or more sets of enclosed blades. Enclosed blades are much safer on public vehicles and they are much more likely to be approved for use by non-professionals. -

Update to FAA Historical Chronology, 1997-2011
1997-2014 Update to FAA Historical Chronology: Civil Aviation and the Federal Government, 1926-1996 (Washington, DC: Federal Aviation Administration, 1998) 1997 January 2, 1997: The Federal Aviation Administration (FAA) issued an airworthiness directive requiring operators to adopt procedures enabling the flight crew to reestablish control of a Boeing 737 experiencing an uncommanded yaw or roll – the phenomenon believed to have brought down USAir Flight 427 at Pittsburgh, Pennsylvania, in 1994. Pilots were told to lower the nose of their aircraft, maximize power, and not attempt to maintain assigned altitudes. (See August 22, 1996; January 15, 1997.) January 6, 1997: Illinois Governor Jim Edgar and Chicago Mayor Richard Daley announced a compromise under which the city would reopen Meigs Field and operate the airport for five years. After that, Chicago would be free to close the airport. (See September 30, 1996.) January 6, 1997: FAA announced the appointment of William Albee as aircraft noise ombudsman, a new position mandated by the Federal Aviation Reauthorization Act of 1996 (Public Law 104-264). (See September 30, 1996; October 28, 1998.) January 7, 1997: Dredging resumed in the search for clues in the TWA Flight 800 crash. The operation had been suspended in mid-December 1996. (See July 17, 1996; May 4, 1997.) January 9, 1997: A Comair Embraer 120 stalled in snowy weather and crashed 18 miles short of Detroit [Michigan] Metropolitan Airport, killing all 29 aboard. (See May 12, 1997; August 27, 1998.) January 14, 1997: In a conference sponsored by the White House Commission on Aviation Safety and Security and held in Washington, DC, at George Washington University, airline executives called upon the Clinton Administration to privatize key functions of FAA and to install a nonprofit, airline-organized cooperative that would manage security issues.