A Learning-Based Framework for Circuit Path Level NBTI Degradation Prediction
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

UCLA Electronic Theses and Dissertations
UCLA UCLA Electronic Theses and Dissertations Title Implications of Modern Semiconductor Technologies on Gate Sizing Permalink https://escholarship.org/uc/item/56s9b2tm Author Lee, John Publication Date 2012 Peer reviewed|Thesis/dissertation eScholarship.org Powered by the California Digital Library University of California University of California Los Angeles Implications of Modern Semiconductor Technologies on Gate Sizing A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Electrical Engineering by John Hyung Lee 2012 c Copyright by John Hyung Lee 2012 Abstract of the Dissertation Implications of Modern Semiconductor Technologies on Gate Sizing by John Hyung Lee Doctor of Philosophy in Electrical Engineering University of California, Los Angeles, 2012 Professor Puneet Gupta, Chair Gate sizing is one of the most flexible and powerful methods available for the timing and power optimization of digital circuits. As such, it has been a very well-studied topic over the past few decades. However, developments in modern semiconductor technologies have changed the context in which gate sizing is performed. The focus has shifted from custom design methods to standard cell based designs, which has been an enabler in the design of modern, large-scale designs. We start by providing benchmarking efforts to show where the state-of-the-art is in standard cell based gate sizing. Next, we develop a framework to assess the impact of the limited precision and range available in the standard cell library on the power-delay tradeoffs. In addition, shrinking dimensions and decreased manufacturing process control has led to variations in the performance and power of the resulting designs. -

Predictive Aging of Reliability of Two Delay Pufs
Predictive Aging of Reliability of two Delay PUFs Naghmeh Karimi1, Jean-Luc Danger2;3, Florent Lozac'h3, and Sylvain Guilley2;3 1 ECE Department, Rutgers University, Piscataway, NJ, USA 08854 [email protected] 2 LTCI, CNRS, T´el´ecom ParisTech, Universit´eParis-Saclay, 75013 Paris, France [email protected] 3 Secure-IC SAS, 35510 Cesson-S´evign´e,France [email protected] Abstract. To protect integrated circuits against IP piracy, Physically Unclonable Functions (PUFs) are deployed. PUFs provide a specific signature for each integrated circuit. However, environmental variations, (e.g., temperature change), power supply noise and more influential IC aging affect the functionally of PUFs. Thereby, it is important to evaluate aging effects as early as possible, preferentially at design time. In this paper we investigate the effect of aging on the stability of two delay PUFs: arbiter-PUFs and loop-PUFs and analyze the architectural impact of these PUFS on reliability decrease due to aging. We observe that the reliability of the arbiter-PUF gets worse over time, whereas the reliability of the loop-PUF remains constant. We interpret this phenomenon by the asymmetric aging of the arbiter, because one half is active (hence aging fast) while the other is not (hence aging slow). Besides, we notice that the aging of the delay chain in the arbiter-PUF and in the loop-PUF has no impact on their reliability, since these PUFs operate differentially. 1 Introduction With the advancement of VLSI technology, people are increasingly relying on electronic devices and in turn integrated circuits (ICs). -

A Fine-Grained 3D IC Technology with NP-Dynamic Logic
Received 13 June 2016; revised 24 February 2017; accepted 8 March 2017. Date of publication 20 March 2017; date of current version 7 June 2017. Digital Object Identifier 10.1109/TETC.2017.2684781 NP-Dynamic Skybridge: A Fine-Grained 3D IC Technology with NP-Dynamic Logic JIAJUN SHI, MINGYU LI, MOSTAFIZUR RAHMAN, SANTOSH KHASANVIS, AND CSABA ANDRAS MORITZ J. Shi, M. Li, and C.A. Moritz are with the Department of Electrical and Computer Engineering, University of Massachusetts, Amherst, MA 01003 M. Rahman is with the School of Computing and Engineering, University of Missouri, Kansas City, MO 65211 S. Khasanvis is with BlueRISC Inc., Amherst, MA 01002 CORRESPONDING AUTHOR: J. SHI ([email protected]) ABSTRACT A new 3D IC fabric named NP-Dynamic Skybridge is proposed that provides fine-grained vertical 3D integration for future technology scaling. Relying on a template of vertical nanowires, it expands our prior work to incorporate and utilize both n- and p-type transistors in a novel NP-Dynamic circuit-style compatible with true 3D integration. This enables a wide range of elementary logics leading to more compact circuits, simple clocking schemes for cascading logic stages and low buffer requirement. We detail new design concepts for larger-scale circuits, and evaluate our approach using a 4-bit nanoprocessor implemented in 16 nm technology node. A new pipelining scheme specifically designed for our 3D NP-Dynamic circuits is employed in the nanoprocessor. We compare our approach with 2D CMOS as well as state-of-the-art tran- sistor-level monolithic 3D IC (T-MI) approach. Benchmarking results for the 4-bit nanoprocessor show bene- fits of up to 56.7x density, 3.8x power and 1.7x throughput over 2D CMOS. -

Eg, Nangate 15 Nm Standard Cell Library
Nanosystem Design Kit (NDK): Transforming Emerging Technologies into Physical Designs of VLSI Systems G. Hills, M. Shulaker, C.-S. Lee, H.-S. P. Wong, S. Mitra Stanford Massachusetts University Institute of Technology Abundant-Data Explosion “Swimming in sensors, drowning in data” Wide variety & complexity Unstructured data 0 40K 0 ExaB (Billionsof GB) 2006 Year 2020 Mine, search, analyze data in near real-time Data centers, mobile phones, robots 2 Abundant-Data Applications Huge memory wall: processors, accelerators Energy Measurements Genomics classification Natural language processing 5% 18 % 0% 0% … 95 82 % % Compute Memory Intel performance counter monitors 2 CPUs, 8-cores/CPU + 128GB DRAM 3 US National Academy of Sciences (2011) 4 Computing Today 2-Dimensional 5 3-Dimensional Nanosystems Computation immersed in memory 6 3-Dimensional Nanosystems Computation immersed in memory Increased functionality Fine-grained, Memory ultra-dense 3D Computing logic Impossible with today’s technologies 7 Enabling Technologies 3D Resistive RAM Massive storage No TSV 1D CNFET, 2D FET Compute, RAM access thermal STT MRAM Ultra-dense, Quick access fine-grained 1D CNFET, 2D FET vias Compute, RAM access thermal 1D CNFET, 2D FET Silicon Compute, Power, Clock compatible thermal 8 Nanosystems: Compact Models Essential 3D Resistive RAM nanohub Massive storage 1D CNFET, 2D FET Compute, RAM access thermal STT MRAM Quick access m-Cell 1D CNFET, 2D FET Compute, RAM access thermal 1D CNFET, 2D FET Compute, Power, Clock thermal 9 Compact Models: Insufficient Alone Design for Realistic Systems Wire parasitics Inter-module interface circuits Routing congestion Application-dependent workloads Multiple clock domains Cache architecture Memory access patterns Processor vs. -

Timing Analysis of Integrated Circuits
UNIVERSITY OF THESSALY SCHOOL OF ENGINEERING Department of Computer & Communication Engineering TIMING ANALYSIS OF INTEGRATED CIRCUITS Master Thesis : Alexandros Mittas Lazaridis July 2012 Volos - Greece 1 Institutional Repository - Library & Information Centre - University of Thessaly 08/12/2017 17:59:09 EET - 137.108.70.7 DEDICATION To my parents and friends Hope for better days. 2 Institutional Repository - Library & Information Centre - University of Thessaly 08/12/2017 17:59:09 EET - 137.108.70.7 ACKNOWLEDGMENTS First I would like to thank Dr. George Stamoulis for advising me for the last 4 years. I have learned many things from him and consider myself fortunate to have been one of his students. I would also like to thank Dr. Nestoras Eymorfopoulos and Dr. Ioannis Moudanos. Without their patience and crucial support this thesis would not have been completed. Finally I am really grateful to my roommates in E5 room of Glavani Steet whose help was really appreciated. Konstantis, Giorgos, Babis, Tasos, Sofia, and Alexia I am really obliged. Forgive me if having forgotten to mention anyone. 3 Institutional Repository - Library & Information Centre - University of Thessaly 08/12/2017 17:59:09 EET - 137.108.70.7 1 Introduction _________________________________ 6 1.1 Goal of this Thesis.............................................................................................6 1.2 Moore’s Law……………………..……………………………..…………………………………………..6 2 Timing Analysis 8 2.1 What is Timing Analysis......................................................................................8 -

Standard Cell Library Design and Optimization Methodology for ASAP7
Standard Cell Library Design and Optimization Methodology for ASAP7 PDK (Invited Paper) Xiaoqing Xu1, Nishi Shah1, Andrew Evans1, Saurabh Sinha1,BrianCline1,andGregYeric1 1ARM Inc., Austin, TX, USA xiaoqing.xu,nishi.shah,andrew.evans,saurabh.sinha,brian.cline,greg.yeric @arm.com { } ABSTRACT explore the impact of lithography design rules and SC archi- Standard cell libraries are the foundation for the entire back- tectures [2,7–9]. However, very few SC design and optimiza- end design and optimization flow in modern application-specific tion techniques are discussed for complex logic/sequential integrated circuit designs. At 7nm technology node and be- cells. More importantly, none of them are publicly available, yond, standard cell library design and optimization is becom- which prevents academic researchers from exploring novel SC ing increasingly difficult due to extremely complex design design and optimization techniques. constraints, as described in the ASAP7 process design kit Therefore, this study proposes a set of design and opti- (PDK). Notable complexities include discrete transistor siz- mization techniques to create publicly-available SC libraries ing due to FinFETs, complicated design rules from lithogra- with ASAP7 PDK [10–12]. We first discuss exhaustive tran- phy and restrictive layout space from modern standard cell ar- sistor sizing for cell timing optimization taking advantage of chitectures. The design methodology presented in this paper the discrete transistor sizing for a FinFET-based SC design. enables efficient and high-quality standard cell library design Generalized Euler path theory [13] is adopted to generate and optimization with the ASAP7 PDK. The key techniques high-quality transistor placement results. The generalized include exhaustive transistor sizing for cell timing optimiza- Euler paths lead to a much larger solution space than that of tion, transistor placement with generalized Euler paths and conventional Euler path theory, while accommodating pin ac- back-end design prototyping for library-level explorations. -
Rapid Co-Optimization of Processing and Circuit Design to Overcome
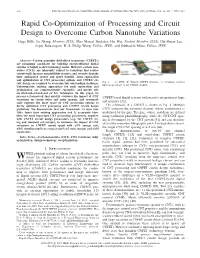
1082 IEEE TRANSACTIONS ON COMPUTER-AIDED DESIGN OF INTEGRATED CIRCUITS AND SYSTEMS, VOL. 34, NO. 7, JULY 2015 Rapid Co-Optimization of Processing and Circuit Design to Overcome Carbon Nanotube Variations Gage Hills, Jie Zhang, Member, IEEE,MaxMarcelShulaker,HaiWei,Student Member, IEEE, Chi-Shuen Lee, Arjun Balasingam, H.-S. Philip Wong, Fellow, IEEE, and Subhasish Mitra, Fellow, IEEE Abstract—Carbon nanotube field-effect transistors (CNFETs) are promising candidates for building energy-efficient digital systems at highly scaled technology nodes. However, carbon nan- otubes (CNTs) are inherently subject to variations that reduce circuit yield, increase susceptibility to noise, and severely degrade their anticipated energy and speed benefits. Joint exploration and optimization of CNT processing options and CNFET cir- cuit design are required to overcome this outstanding challenge. Fig. 1. (a) CNT. (b) Typical CNFET structure. (c) Scanning electron microscopy image of the CNFET channel. Unfortunately, existing approaches for such exploration and optimization are computationally expensive, and mostly rely on trial-and-error-based ad hoc techniques. In this paper, we present a framework that quickly evaluates the impact of CNT CNFET-based digital systems with massive integration of logic variations on circuit delay and noise margin, and systemati- cally explores the large space of CNT processing options to and memory [42]. derive optimized CNT processing and CNFET circuit design The schematic of a CNFET is shown in Fig. 1. Multiple guidelines. -

Does Logic Locking Work with EDA Tools?
Does logic locking work with EDA tools? Zhaokun Han Muhammad Yasin Jeyavijayan (JV) Rajendran Texas A&M University Texas A&M University Texas A&M University [email protected] [email protected] [email protected] Abstract delegates IC fabrication to TSMC or Samsung, and deputes product assembly/test services to Foxconn [2]. Logic locking is a promising solution against emerging In a globalized supply chain, the untrusted entities may hardware security threats, which entails protecting a Boolean obtain a design netlist1, a chip layout, or a manufactured IC. circuit using a “keying” mechanism. The latest and hith- This may lead to threats such as IP piracy, counterfeiting, erto unbroken logic-locking techniques are based on the reverse engineering (REing), overbuilding, and insertion of “corrupt-and-correct (CAC)” principle, offering provable se- hardware Trojans [3]. IP piracy entails malicious entities curity against input-output query attacks. However, it remains illegally using IPs. A foundry can manufacture additional unclear whether these techniques are susceptible to structural ICs to sell at lower profit margins. End-users can conduct attacks. This paper exploits the properties of integrated circuit piracy by REing an IC to extract the design netlist or other (IC) design tools, also termed electronic design automation design/technology secrets. REing of an IC involves peeling off (EDA) tools, to undermine the security of the CAC techniques. the package of an IC, etching the IC layer-by-layer, imaging Our proposed attack can break all the CAC techniques, in- each layer, and stitching the images together to extract the cluding the unbroken CACrem technique that 40+ hackers design netlist. -

Exploring Voltage Scaling Techniques in Embedded Processors Hardware Monitors
Exploring Voltage Scaling Techniques in Embedded Processors Hardware Monitors Arman Pouraghily, Padmaja Duggisetty, Thiago Teixeira VLSI Design Principles Final Report - ECE 658 Fall 2014 Department of Electrical and Computer Engineering University of Massachusetts, Amherst, MA, USA Email: fapouraghily,pduggisetty,[email protected] Abstract—The Internet is a very important communication is taken into account. Our goal to estimate power consumption infrastructure in modern life, with applications varying from overhead – imposed by the introduction of hardware monitor banking transactions, transfer of copyrighted material, compa- – and by applying power saving techniques, minimizing this nies’ assets, to the most simple web surfing. The role of Internet is expected to grow exponentially with cloud computing and overhead is achieved by using voltage scaling techniques. Internet of Things. In this context, the router will continue to The basic idea behind our approach is the simple fact that be the equipment carrying most of the Internet traffic, with the logical complexity of the modules used in the hardware an increasing number of routers’ packet forwarding application monitor is by far less that the ones used in the main CPU being deployed in the form of programmable network processor. Many security algorithms have been developed for the network which means that our hardware monitor could run with much security as a whole in order to increase reliability of com- higher clock rate. However, running the hardware monitor at a munications. The network infrastructure security has received higher frequency than the Network Processor leads to resource less attention, even though attacks in the data plane that can wastage. -
Reliable Design of Three-Dimensional Integrated Circuits
Reliable Design of Three-Dimensional Integrated Circuits For obtaining the academic degree of Doctor of Engineering Department of Informatics Karlsruhe Institute of Technology (KIT) Karlsruhe, Germany Approved Dissertation by Master of Science Shengcheng Wang From Tianjin, China Date of Oral Examination: 04.05.2018 Supervisor: Prof. Dr. Mehdi Baradaran Tahoori, Karlsruhe Institute of Technology Co-supervisor: Prof. Dr. Said Hamdioui, Delft University of Technology ii Shengcheng Wang Haid-und-Neu Str. 62 76131 Karlsruhe Hiermit erkläre ich an Eides statt, dass ich die von mir vorgelegte Arbeit selbstständig verfasst habe, dass ich die verwendeten Quellen, Internet-Quellen und Hilfsmittel voll- ständig angegeben haben und dass ich die Stellen der Arbeit - einschließlich Tabellen, Karten und Abbildungen - die anderen Werken oder dem Internet im Wortlaut oder dem Sinn nach entnommen sind, auf jeden Fall unter Angabe der Quelle als Entlehnung kenntlich gemacht habe. Karlsruhe, Mai 2018 ——————————— Shengcheng Wang iii This page would be intentionally left blank. Abstract Beginning with the invention of the first Integrated Circuit (IC) by Kilby and Noyce in 1959, performance growth inIC is realized primarily by geometrical scaling, which has resulted in a steady doubling of device density from one technology node to another. This observation was famously known as “Moore’s law”. However, the performance en- hancement due to traditional technology scaling has begun to slow down and present diminishing returns due to a number of imminent show-stoppers, including fundamen- tal physical limits of transistor scaling, the growing significance of quantum effects as transistors shrink, and a mismatch between transistors and interconnects regarding size, speed and power. -

Reliability-Aware Design to Suppress Aging
Reliability-Aware Design to Suppress Aging Hussam Amrouch∗, Behnam Khaleghiy, Andreas Gerstlauerz and Jörg Henkel∗ ∗Karlsruhe Institute of Technology, Karlsruhe, Germany, ySharif University of Technology, Tehran, Iran, zUniversity of Texas, Austin, USA {amrouch; henkel}@kit.edu, [email protected], [email protected] ABSTRACT (when Si-H bonds break at the Si-SiO2 interface) and ox- Due to aging, circuit reliability has become extraordinary ide traps (when charges are captured in the oxide vacancies challenging. Reliability-aware circuit design flows do virtu- within the dielectric). Over time, generated defects (i.e. in- ally not exist and even research is in its infancy. In this pa- terface/oxide traps) accumulate inside the transistor, mani- per, we propose to bring aging awareness to EDA tool flows festing themselves as degradations in its electrical character- based on so-called degradation-aware cell libraries. These istics (Vth, µ, etc.). Hence, aged transistors become slower, libraries include detailed delay information of gates/cells which increases the likelihood of timing violations. BTI has under the impact that aging has on both threshold volt- also instantaneous effects in which degradations are observed age (V ) and carrier mobility (µ) of transistors. This is within a very short time domain (e.g., 1µs) [2]. However, th this work considers only the long-term effects of aging. unlike state of the art which considers Vth only. We show how ignoring µ degradation leads to underestimating guard- Timing Guardband: To overcome aging, manufacturers bands by 19% on average. Our investigation revealed that typically employ a guardband (TG) on top of the critical path the impact of aging is strongly dependent on the operating delay (T ) of a design [3] to guarantee that it will always be conditions of gates (i.e. -

Area Complexity Estimation for Combinational Logic Using Fourier Transform on Boolean Cube
Area Complexity Estimation for Combinational Logic using Fourier Transform on Boolean Cube A THESIS submitted by JAYANT THATTE in partial fulfilment of the requirements for the award of the degree of MASTER OF TECHNOLOGY DEPARTMENT OF ELECTRICAL ENGINEERING INDIAN INSTITUTE OF TECHNOLOGY MADRAS. APRIL 2014 THESIS CERTIFICATE This is to certify that the thesis titled Area Complexity Estimation for Combinational Logic using Fourier Transform on Boolean Cube, submitted by Jayant Thatte, to the Indian Institute of Technology, Madras, for the award of the degree of Master of Technology, is a bona fide record of the research work done by him under our supervision. The contents of this thesis, in full or in parts, have not been submitted to any other Institute or University for the award of any degree or diploma. Dr. Shankar Balachandran Research Guide Assistant Professor Place: Chennai Dept. of Computer Science IIT-Madras, 600 036 Date: ACKNOWLEDGEMENTS Any research is not possible without the combined efforts of many people, and this work is no different. I thank my thesis advisor, Dr. Shankar Balachandran, who has been a constant guiding support for my research throughout the duration of this project. I also thank Dr. Nitin Chandrachoodan for agreeing to be co-guide for my project. I am indebted to Ankit Kagliwal whose Master’s project served as a motivation for this research problem. I would like to thank Prof. Anand Raghunathan, Purdue University and Swagath Venkataramani, Purdue University for their inputs and help. It was a great experience to collaborate with Chaitra Yarlagadda on certain parts of this project.