Report on the Loss of the Mars Polar Lander and Deep Space 2 Missions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Deep Space 2: the Mars Microprobe Project and Beyond
First International Conference on Mars Polar Science 3039.pdf DEEP SPACE 2: THE MARS MICROPROBE PROJECT AND BEYOND. S. E. Smrekar and S. A. Gavit, Mail Stop 183-501, Jet Propulsion Laboratory, California Institute of Technology, 4800 Oak Grove Drive, Pasa- dena CA 91109, USA ([email protected]). Mission Overview: The Mars Microprobe Proj- System Design, Technologies, and Instruments: ect, or Deep Space 2 (DS2), is the second of the New Telecommunications. The DS2 telecom system, Millennium Program planetary missions and is de- which is mounted on the aftbody electronics plate, signed to enable future space science network mis- relays data back to earth via the Mars Global Surveyor sions through flight validation of new technologies. A spacecraft which passes overhead approximately once secondary goal is the collection of meaningful science every 2 hours. The receiver and transmitter operate in data. Two micropenetrators will be deployed to carry the Ultraviolet Frequency Range (UHF) and data is out surface and subsurface science. returned at a rate of 7 Kbits/second. The penetrators are being carried as a piggyback Ultra-low-temperature lithium primary battery. payload on the Mars Polar Lander cruise ring and will One challenging aspect of the microprobe design is be launched in January of 1999. The Microprobe has the thermal environment. The batteries are likely to no active control, attitude determination, or propulsive stay no warmer than -78° C. A lithium-thionyl pri- systems. It is a single stage from separation until mary battery was developed to survive the extreme landing and will passively orient itself due to its aero- temperature, with a 6 to 14 V range and a 3-year shelf dynamic design (Fig. -

Mars Program Independent Assessment Team Summary Report
Mars Program Independent Assessment Team Summary Report March 14, 2000 Mars Climate Orbiter failed to achieve Mars orbit on September 23, 1999. On December 3, 1999, Mars Polar Lander and two Deep Space 2 microprobes failed. As a result, the NASA Administrator established the Mars Program Independent Assessment Team (MPIAT) with the following charter: Review and Analyze Successes and Failures of Recent Mars and Deep Space Missions − Mars Global Surveyor – Mars Climate Orbiter − Pathfinder – Mars Polar Lander − Deep Space 1 – Deep Space 2 Examine the Relationship Between and Among − NASA Jet Propulsion Laboratory (JPL) − California Institute of Technology (Caltech) − NASA Headquarters − Industry Partners Assess Effectiveness of Involvement of Scientists Identify Lessons Learned From Successes and Failures Review Revised Mars Surveyor Program to Assure Lessons Learned Are Utilized Oversee Mars Polar Lander and Deep Space 2 Failure Reviews Complete by March 15, 2000 In-depth reviews were conducted at NASA Headquarters, JPL, and Lockheed Martin Astronautics (LMA). Structured reviews, informal sessions with numerous Mars Program participants, and extensive debate and discussion within the MPIAT establish the basis for this report. The review process began on January 7, 2000, and concluded with a briefing to the NASA Administrator on March 14, 2000. This report represents the integrated views of the members of the MPIAT who are identified in the appendix. In total, three related reports have been produced: this report, a more detailed report titled “Mars Program Independent Assessment Team Report” (dated March 14, 2000), and the “Report on the Loss of the Mars Polar Lander and Deep Space 2 Missions” (dated March 22, 2000). -
Dreaming of Mars Sample Return
National Aeronautics and Space Administration Dreaming of Mars Sample Return Jet Propulsion Laboratory California Institute of Technology Pasadena, California Erik M. Conway October 2012 Solar System @ 50 2 – 11/13/2012 3 – 11/13/2012 4 – 11/13/2012 5 – 11/13/2012 Threads of this Story • Design and Engineering in support of science • Competition for funds within NASA • NASA’s dual self-image as – A scientific agency – The enabler of human expansion into the solar system 6 – 11/13/2012 Act I: Scientists and Sample Return, 1977-1989 7 – 11/13/2012 Act II: Sample Return in the Faster, Better, Cheaper Era 8 – 11/13/2012 9 – 11/13/2012 10 – 11/13/2012 11 – 11/13/2012 12 – 11/13/2012 13 – 11/13/2012 LANDED CONFIGURATION HGA MAV/MAV INSULATION UHF ANTENNA SSI LGA 2 REC & 2 TRANS SSOHOWN ROVER Y SOLAR ARRAY Z 2 PLCS X DRILL ENVELOPE INSTRUMENT DECK UPPER SURFACE RAMPS Report on the Loss of the Mars Polar Lander and Deep Space 2 Missions JPL Special Review Board 22 March 2000 JPL D-18709 15 – 11/13/2012 Ac t III The Bubble Team and Large Lander Studies 16 – 11/13/2012 Evolution from MSR Large Lander to Mars Smart Lander (circa early 2000) Mars Science Laboratory Mars 98 & MSR Mars Smart Lander Mars Expl. Rover Mars Science Lab. •EDL architecture given one last “fresh” look, focused on: •The failure of the M98 •Extensive evaluation of •MSL mission was delayed Cost Reduction lander mission during MSR’s many different EDL and to 2007 and then 2009, Performance Increase phase A, led to a change in Landing architectures resulting in more time to risk posture on landing suitable for MSR were develop technologies. -

Mars Exploration Camp Is to Excite Young Minds and Inspire Student Trainees Toward Future Science, Technology, Engineering, and Mathematics (STEM) Pursuits
National Aeronautics and Space Administration Summer of Innovation Mars Exploration 4th – 9th grade www.nasa.gov Introduction The goal of the NASA Summer of Innovation Mars Exploration camp is to excite young minds and inspire student trainees toward future science, technology, engineering, and mathematics (STEM) pursuits. Raising trainee achievement in STEM pursuits begins by leading trainees on a journey of understanding through these highly engaging activities. The activities and experiences in this guide come from across NASAʼs vast collection of educational materials. This themed camp outline provides examples of one-day, two-day, and weeklong science and engineering programs. Each day contains 6-8 hours of activities totaling more than 35 hours of instructional time. The camp template will assist you in developing an appropriate learning progression focusing on the concepts necessary to engage in learning about Mars. The Mars Exploration camp provides an interactive set of learning experiences that center on the past, present, and future exploration of Mars. The activities scaffold to include cooperative learning, problem solving, critical thinking, and hands-on experiences. As each activity progresses, the conceptual challenges increase, offering trainees full immersion in the topics. Intended Learning Experiences Through the participation in these camps future scientists and engineers will have the opportunity to explore Mars. Student trainees gain learning experiences that help make scientific careers something they can envision -
L02: Case Studies: the Mars Program
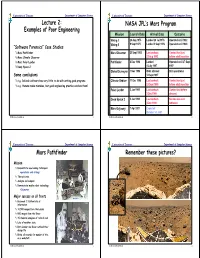
University of Toronto Department of Computer Science University of Toronto Department of Computer Science Lecture 2: NASA JPL’s Mars Program Examples of Poor Engineering Mission Launch Date Arrival Date Outcome Viking I 20 Aug 1975 Landed 20 Jul 1976 Operated until 1982 Viking II 9 Sept 1975 Landed 3 Sept 1976 Operated until 1980 ➜ “Software Forensics” Case Studies: Mars Pathfinder Mars Observer 25 Sept 1992 Last contact: Contact lost just Mars Climate Observer 22 Aug 1993 before orbit insertion Mars Polar Lander Pathfinder 4 Dec 1996 Landed Operated until 27 Sept Deep Space 2 4 July 1997 1997 Global Surveyor 7 Nov 1996 Orbit attained Still operational ➜ Some conclusions 12 Sept 1997 e.g. Reliable software has very little to do with writing good programs Climate Orbiter 11 Dec 1998 Last contact: Contact lost just 23 Sept 1999 before orbit insertion e.g. Humans make mistakes, but good engineering practice catches them! Polar Lander 3 Jan 1999 Last contact: Contact lost before 3 Dec 1999 descent Deep Space 2 3 Jan 1999 Last contact: No data was ever 3 Dec 1999 retrieved Mars Odyssey 7 Apr 2001 Expected: October 24, 2001 © 2001, Steve Easterbrook 1 © 2001, Steve Easterbrook 2 University of Toronto Department of Computer Science University of Toronto Department of Computer Science Mars Pathfinder Remember these pictures? ➜ Mission Demonstrate new landing techniques parachute and airbags Take pictures Analyze soil samples Demonstrate mobile robot technology Sojourner ➜ Major success on all fronts Returned 2.3 billion bits of information -

Mars Polar Lander JPL Report Part 5 (Pdf)
8 SUMMARY OF POTENTIAL DS2 FAILURE MODES This section provides a summary description of the DS2 potential failure modes considered by the Board. It also provides a high-level assessment of the plausibility of each of the failure modes based on the Board’s review of the relevant design, implementation, and test history, and what may be inferred from data obtained throughout the mission operations. References are made to Sections 9, which contains detailed descriptions of the failure modes summarized in this section, along with findings and Lessons Learned. Failure modes are divided into two groups: ! Failure Modes Affecting Both Probes ! Failure Modes Affecting a Single Probe The four DS2 potential failure modes identified by the Board as plausible are highlighted as FLAG 1, FLAG 2, FLAG 3, and FLAG 4. Figure 8-1 illustrates the DS2 entry, descent, and impact (EDI) sequence and shows potential failure modes. Mars Polar Lander/Deep Space 2 Loss — JPL Special Review Board Report JPL D-18709 — page 124 • Probes experience battery drain prior to entry, descent, and impact sequence • Probes separate prematurely • Probes fail to separate from cruise stage (flaw in separation system) • Aeroshells fail (design flaw) • MPL fails to separate from cruise stage • MPL overheating, skip-out, excessive down-track entry points • Probes skip out or land too far down track; can’t • Random part failure communicate with MGS • Undetected aeroshell handling damage • Probes bounce on impact • Probes encounter surface conditions that exceed design capabilities • Structural failure on impact • Electronic or battery failure on impact • Ionization breakdown in Mars atmosphere • DS2 UHF link fails • Probes land on their sides, interfering with antenna performance Figure 8-1. -

Mer Landing.Qxd
NATIONAL AERONAUTICS AND SPACE ADMINISTRATION Mars Exploration Rover Landings Press Kit January 2004 Media Contacts Donald Savage Policy/Program Management 202/358-1547 Headquarters [email protected] Washington, D.C. Guy Webster Mars Exploration Rover Mission 818/354-5011 Jet Propulsion Laboratory, [email protected] Pasadena, Calif. David Brand Science Payload 607/255-3651 Cornell University, [email protected] Ithaca, N.Y. Contents General Release …………………………………………………………..................................…… 3 Media Services Information ……………………………………….........................................…..... 5 Quick Facts ………………………………………………………................................……………… 6 Mars at a Glance ……………………………………………………….................................………. 7 Historical Mars Missions ………………………………………………….....................................… 8 Mars: The Water Trail ………………………………………………………………….................…… 9 Where We've Been and Where We're Going …………………………………................ 14 Science Investigations .............................................................................................................. 17 Landing Sites ............................................................................................................................. 23 Mission Overview ……………...………………………………………..............................………. 28 Spacecraft ................................................................................................................................. 38 Program/Project Management …………………………………………….................................… -
Successes and Failures of Recent Mars Exploration
Successes and Failures of Recent Mars Exploration Paul Withers [email protected] Boston University’s Center for Space Physics 2004.02.13 Bill Waller’s undergrad seminar class at Tufts University Aims of this talk • Describe the past decade of Mars exploration • Describe how half of attempted missions failed • Describe how NASA responded to failures in short and long term • Discuss lessons learned • Not an overview of Mars science Sequence of Missions • Mars Observer (1992) failure • Mars 96 (1996) [Russia] failure • Mars Pathfinder (1996) success • Mars Global Surveyor (1996) success • Nozomi (1998) [Japan] failure • Mars Climate Orbiter (1998) failure • Mars Polar Lander (1999) failure • Deep Space 2 (1999) (2 small probes) failure (x2) • 2001 Mars Odyssey (2001) success • Mars Express (2003) [ESA] success (?) • Beagle 2 (2003) [ESA/UK] failure • Mars Exploration Rovers Spirit and Opportunity (2003) success (x2) (?) • 12 years, 14 spacecraft, 8 failures, 3 successes, 3 probable successes Mars Observer (1992) Scientific Aims of Mars Observer • Global topo and gravity map • Measure magnetic field • Elemental makeup of surface • 2m-pixel images of surface • Mineralogical map of surface • Study atmospheric circulation • $980 mission, first US mission to Mars since Viking in 1976. Failure of Mars Observer • Plan: Pressurize fuel tank a few days before Mars Orbit Insertion • Plan: Turn transmitter off during pressurization to protect its components from shock, turn on again after pressurization complete • Reality: No further transmissions received after start of pressurization, complete loss of mission. • Failure Analysis: A fuel line ruptured during pressurization and the corrosive fuel disabled the spacecraft. Some parts were designed assuming pressurization after launch, not many months after launch. -

Fuelling the Future of Mobility: Moon-Produced Space Propellants
May 2021 Fuelling the future of mobility: Moon-produced space propellants Go Beyond The forthcoming decade is expected to witness a wave of missions to the Moon and Mars, and fuel supply is a major challenge to make these travels economically sustainable. The difference in the required energy to launch from Earth and from the Moon is causing people to reconsider refuelling point positions (e.g. NHRO, Near Halo Rectilinear Orbit) and contemplate using space-produced propellants. A whole production and transport value chain would have to be established on the Moon. Initial investments are sizeable (~$7B) but an economic oportunity for space propellants should exist if launch costs from Earth do not fall too much below current SpaceX standards. Capex optimization and increased scale should further improve the competitiveness of space propellants. Positive outcomes for ’terrestrial‘ applications are also expected to be significant. Fuelling the future of mobility: Moon-produced space propellants The Case for Moon-Produced Propellants The next decade is expected to witness After 2024, NASA expects to set up a a boom in Lunar and Mars exploration. base camp on the moon (’Artemis Base Space-exploration- After the space race of the 60s, there has Camp’) to be a long-term foothold for lunar been an unprecedented resurgence of exploration, as well as a Moon-orbiting driven technologies unmanned Lunar and Mars missions since station (’Gateway’) on the NHRO (Near the end of the 90s, as well as the spread Rectilinear Halo Orbit) being a site for also have very of space programs to various countries. -

Mars Science Laboratory Landing
PRESS KIT/JULY 2012 Mars Science Laboratory Landing Media Contacts Dwayne Brown NASA’s Mars 202-358-1726 Steve Cole Program 202-358-0918 Headquarters [email protected] Washington [email protected] Guy Webster Mars Science Laboratory 818-354-5011 D.C. Agle Mission 818-393-9011 Jet Propulsion Laboratory [email protected] Pasadena, Calif. [email protected] Science Payload Investigations Alpha Particle X-ray Spectrometer: Ruth Ann Chicoine, Canadian Space Agency, Saint-Hubert, Québec, Canada; 450-926-4451; [email protected] Chemistry and Camera: James Rickman, Los Alamos National Laboratory, Los Alamos, N.M.; 505-665-9203; [email protected] Chemistry and Mineralogy: Rachel Hoover, NASA Ames Research Center, Moffett Field, Calif.; 650-604-0643; [email protected] Dynamic Albedo of Neutrons: Igor Mitrofanov, Space Research Institute, Moscow, Russia; 011-7-495-333-3489; [email protected] Mars Descent Imager, Mars Hand Lens Imager, Mast Camera: Michael Ravine, Malin Space Science Systems, San Diego; 858-552-2650 extension 591; [email protected] Radiation Assessment Detector: Donald Hassler, Southwest Research Institute; Boulder, Colo.; 303-546-0683; [email protected] Rover Environmental Monitoring Station: Luis Cuesta, Centro de Astrobiología, Madrid, Spain; 011-34-620-265557; [email protected] Sample Analysis at Mars: Nancy Neal Jones, NASA Goddard Space Flight Center, Greenbelt, Md.; 301-286-0039; [email protected] Engineering Investigation MSL Entry, Descent and Landing Instrument Suite: Kathy Barnstorff, NASA Langley Research Center, Hampton, Va.; 757-864-9886; [email protected] Contents Media Services Information. -
Mars Insight Landing Press Kit
Introduction National Aeronautics and Space Administration Mars InSight Landing Press Kit NOVEMBER 2018 www.nasa.gov 1 Table of Contents Introduction 3 Media Services 6 Quick Facts: Landing Facts 11 Quick Facts: Mars at a Glance 15 Mission: Overview 17 Mission: Spacecraft 29 Mission: Science 40 Mission: Landing Site 54 Program & Project Management 56 Appendix: Mars Cube One Tech Demo 58 Appendix: Gallery 62 Appendix: Science Objectives, Quantified 64 Appendix: Historical Mars Missions 65 Appendix: NASA’s Discovery Program 67 2 Introduction Mars InSight Landing Press Kit Introduction NASA’s next mission to Mars -- InSight -- is expected to land on the Red Planet on Nov. 26, 2018. InSight is a mission to Mars, but it is also more than a Mars mission. It will help scientists understand the formation and early evolution of all rocky planets, including Earth. In addition to InSight, a technology demonstration called Mars Cube One (MarCO) is flying separately to the Red Planet. It will test a new kind of data relay from another InSight will help us learn about the formation of Mars -- as well planet for the first time, though InSight’s success is not as all rocky planets. Credit: NASA/JPL-Caltech dependent on MarCO. Five Things to Know About Landing 1. Landing on Mars is difficult Only about 40 percent of the missions ever sent to Mars -- by any space agency -- have been successful. The U.S. is the only nation whose missions have survived a Mars landing. The thin atmosphere -- just 1 percent of Earth’s -- means that there’s little friction to slow down a spacecraft. -
Concept Evaluation of Mars Drilling and Sampling Instrument
Helsinki University of Technology, Laboratory of Space Technology Espoo, March 2005 REPORT 56 CONCEPT EVALUATION OF MARS DRILLING AND SAMPLING INSTRUMENT Matti Anttila TEKNILLINEN KORKEAKOULU TEKNISKA HÖGSKOLAN HELSINKI UNIVERSITY OF TECHNOLOGY Helsinki University of Technology Laboratory of Space Technology Espoo, 2004 Concept Evaluation of Mars Drilling and Sampling Instrument Matti Anttila Dissertation for the degree of Doctor of Science in Technology to be presented with due permission of the Department of Electrical and Communications Engineering, for public examination and debate in Auditorium S4 at Helsinki University of Technology (Espoo, Finland) on the 27th of May, 2005, at 12 noon. ISBN 951-22-7646-1 (printed) ISBN 951-22-7647-X (electronic) ISSN 0786-8154 Helsinki University of Technology Mailing address: Laboratory of Space Technology P.O.Box 3000 FIN-02015 HUT Finland Street address: Otakaari 5 A FIN-02150 Espoo Tel. +358 9 451 2378 Fax. +358 9 451 2898 E-mail: [email protected] http://www.space.hut.fi © Matti Anttila ISBN 951-22-7646-1 ISSN 0786-8154 Picaset Oy Helsinki 2005 On the surface of Mars, the Sun is about half the size as seen from Earth. The nights are colder than Antarctica has ever been, and even summer days are freezing. The atmosphere is so thin, that it would boil our blood from the smallest wound, and the air consists of deadly amounts of carbon dioxide. There is no life, there is no running water and there is no shelter to escape the Sun’s ultra- violet radiation that sterilizes everything left to the Red Planet’s surface.