Concept Evaluation of Mars Drilling and Sampling Instrument
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

THE PLANETARY REPORT FAREWELL, SEPTEMBER EQUINOX 2017 VOLUME 37, NUMBER 3 CASSINI Planetary.Org CELEBRATING a LEGACY of DISCOVERIES
THE PLANETARY REPORT FAREWELL, SEPTEMBER EQUINOX 2017 VOLUME 37, NUMBER 3 CASSINI planetary.org CELEBRATING A LEGACY OF DISCOVERIES ATMOSPHERIC CHANGES C DYNAMIC RINGS C COMPLICATED TITAN C ACTIVE ENCELADUS ABOUT THIS ISSUE LINDA J. SPILKER is Cassini project scientist at the Jet Propulsion Laboratory. IN 2004, Cassini, the most distant planetary seafloor. As a bonus, it has revealed jets of orbiter ever launched by humanity, arrived at water vapor and ice particles shooting out of Saturn. For 13 years, through its primary and fractures at the moon’s south pole. two extended missions, this spacecraft has These discoveries have fundamentally been making astonishing discoveries, reshap- altered many of our concepts of where life ing and changing our understanding of this may be found in our solar system. Cassini’s unique planetary system within our larger observations at Enceladus and Titan have made system of unique worlds. A few months ater exploring these ocean worlds a major focus for arrival, Cassini released Huygens, European planetary science. New insights from these dis- Space Agency’s parachuted probe built to coveries also have implications for potentially study the atmosphere and surface of Titan habitable worlds beyond our solar system. and image its surface for the very first time. In this special issue of The Planetary Report, a handful of Cassini scientists share some results from their studies of Saturn and its moons. Because there’s no way to fit every- thing into this slim volume, they’ve focused on a few highlights. Meanwhile, Cassini continues performing its Grand Finale orbits between the rings and the top of Saturn’s atmosphere, circling the planet once every 6.5 days. -

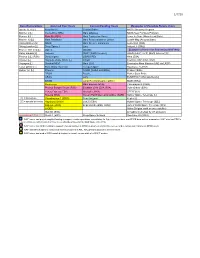
Appendix 1: Venus Missions
Appendix 1: Venus Missions Sputnik 7 (USSR) Launch 02/04/1961 First attempted Venus atmosphere craft; upper stage failed to leave Earth orbit Venera 1 (USSR) Launch 02/12/1961 First attempted flyby; contact lost en route Mariner 1 (US) Launch 07/22/1961 Attempted flyby; launch failure Sputnik 19 (USSR) Launch 08/25/1962 Attempted flyby, stranded in Earth orbit Mariner 2 (US) Launch 08/27/1962 First successful Venus flyby Sputnik 20 (USSR) Launch 09/01/1962 Attempted flyby, upper stage failure Sputnik 21 (USSR) Launch 09/12/1962 Attempted flyby, upper stage failure Cosmos 21 (USSR) Launch 11/11/1963 Possible Venera engineering test flight or attempted flyby Venera 1964A (USSR) Launch 02/19/1964 Attempted flyby, launch failure Venera 1964B (USSR) Launch 03/01/1964 Attempted flyby, launch failure Cosmos 27 (USSR) Launch 03/27/1964 Attempted flyby, upper stage failure Zond 1 (USSR) Launch 04/02/1964 Venus flyby, contact lost May 14; flyby July 14 Venera 2 (USSR) Launch 11/12/1965 Venus flyby, contact lost en route Venera 3 (USSR) Launch 11/16/1965 Venus lander, contact lost en route, first Venus impact March 1, 1966 Cosmos 96 (USSR) Launch 11/23/1965 Possible attempted landing, craft fragmented in Earth orbit Venera 1965A (USSR) Launch 11/23/1965 Flyby attempt (launch failure) Venera 4 (USSR) Launch 06/12/1967 Successful atmospheric probe, arrived at Venus 10/18/1967 Mariner 5 (US) Launch 06/14/1967 Successful flyby 10/19/1967 Cosmos 167 (USSR) Launch 06/17/1967 Attempted atmospheric probe, stranded in Earth orbit Venera 5 (USSR) Launch 01/05/1969 Returned atmospheric data for 53 min on 05/16/1969 M. -

Deep Space 2: the Mars Microprobe Project and Beyond
First International Conference on Mars Polar Science 3039.pdf DEEP SPACE 2: THE MARS MICROPROBE PROJECT AND BEYOND. S. E. Smrekar and S. A. Gavit, Mail Stop 183-501, Jet Propulsion Laboratory, California Institute of Technology, 4800 Oak Grove Drive, Pasa- dena CA 91109, USA ([email protected]). Mission Overview: The Mars Microprobe Proj- System Design, Technologies, and Instruments: ect, or Deep Space 2 (DS2), is the second of the New Telecommunications. The DS2 telecom system, Millennium Program planetary missions and is de- which is mounted on the aftbody electronics plate, signed to enable future space science network mis- relays data back to earth via the Mars Global Surveyor sions through flight validation of new technologies. A spacecraft which passes overhead approximately once secondary goal is the collection of meaningful science every 2 hours. The receiver and transmitter operate in data. Two micropenetrators will be deployed to carry the Ultraviolet Frequency Range (UHF) and data is out surface and subsurface science. returned at a rate of 7 Kbits/second. The penetrators are being carried as a piggyback Ultra-low-temperature lithium primary battery. payload on the Mars Polar Lander cruise ring and will One challenging aspect of the microprobe design is be launched in January of 1999. The Microprobe has the thermal environment. The batteries are likely to no active control, attitude determination, or propulsive stay no warmer than -78° C. A lithium-thionyl pri- systems. It is a single stage from separation until mary battery was developed to survive the extreme landing and will passively orient itself due to its aero- temperature, with a 6 to 14 V range and a 3-year shelf dynamic design (Fig. -
Jjmonl 1603.Pmd
alactic Observer GJohn J. McCarthy Observatory Volume 9, No. 3 March 2016 GRAIL - On the Trail of the Moon's Missing Mass GRAIL (Gravity Recovery and Interior Laboratory) was a NASA scientific mission in 2011/12 to map the surface of the moon and collect data on gravitational anomalies. The image here is an artist's impres- sion of the twin satellites (Ebb and Flow) orbiting in tandem above a gravitational image of the moon. See inside, page 4 for information on gravitational anomalies (mascons) or visit http://solarsystem. nasa.gov/grail. The John J. McCarthy Observatory Galactic Observer New Milford High School Editorial Committee 388 Danbury Road Managing Editor New Milford, CT 06776 Bill Cloutier Phone/Voice: (860) 210-4117 Production & Design Phone/Fax: (860) 354-1595 www.mccarthyobservatory.org Allan Ostergren Website Development JJMO Staff Marc Polansky It is through their efforts that the McCarthy Observatory Technical Support has established itself as a significant educational and Bob Lambert recreational resource within the western Connecticut Dr. Parker Moreland community. Steve Barone Jim Johnstone Colin Campbell Carly KleinStern Dennis Cartolano Bob Lambert Mike Chiarella Roger Moore Route Jeff Chodak Parker Moreland, PhD Bill Cloutier Allan Ostergren Cecilia Dietrich Marc Polansky Dirk Feather Joe Privitera Randy Fender Monty Robson Randy Finden Don Ross John Gebauer Gene Schilling Elaine Green Katie Shusdock Tina Hartzell Paul Woodell Tom Heydenburg Amy Ziffer In This Issue "OUT THE WINDOW ON YOUR LEFT" ............................... 4 SUNRISE AND SUNSET ...................................................... 13 MARE HUMBOLDTIANIUM AND THE NORTHEAST LIMB ......... 5 JUPITER AND ITS MOONS ................................................. 13 ONE YEAR IN SPACE ....................................................... 6 TRANSIT OF JUPITER'S RED SPOT .................................... -
List of Missions Using SPICE (PDF)
1/7/20 Data Restorations Selected Past Users Current/Pending Users Examples of Possible Future Users Apollo 15, 16 [L] Magellan [L] Cassini Orbiter NASA Discovery Program Mariner 2 [L] Clementine (NRL) Mars Odyssey NASA New Frontiers Program Mariner 9 [L] Mars 96 (RSA) Mars Exploration Rover Lunar IceCube (Moorehead State) Mariner 10 [L] Mars Pathfinder Mars Reconnaissance Orbiter LunaH-Map (Arizona State) Viking Orbiters [L] NEAR Mars Science Laboratory Luna-Glob (RSA) Viking Landers [L] Deep Space 1 Juno Aditya-L1 (ISRO) Pioneer 10/11/12 [L] Galileo MAVEN Examples of Users not Requesting NAIF Help Haley armada [L] Genesis SMAP (Earth Science) GOLD (LASP, UCF) (Earth Science) [L] Phobos 2 [L] (RSA) Deep Impact OSIRIS REx Hera (ESA) Ulysses [L] Huygens Probe (ESA) [L] InSight ExoMars RSP (ESA, RSA) Voyagers [L] Stardust/NExT Mars 2020 Emmirates Mars Mission (UAE via LASP) Lunar Orbiter [L] Mars Global Surveyor Europa Clipper Hayabusa-2 (JAXA) Helios 1,2 [L] Phoenix NISAR (NASA and ISRO) Proba-3 (ESA) EPOXI Psyche Parker Solar Probe GRAIL Lucy EUMETSAT GEO satellites [L] DAWN Lunar Reconnaissance Orbiter MOM (ISRO) Messenger Mars Express (ESA) Chandrayan-2 (ISRO) Phobos Sample Return (RSA) ExoMars 2016 (ESA, RSA) Solar Orbiter (ESA) Venus Express (ESA) Akatsuki (JAXA) STEREO [L] Rosetta (ESA) Korean Pathfinder Lunar Orbiter (KARI) Spitzer Space Telescope [L] [L] = limited use Chandrayaan-1 (ISRO) New Horizons Kepler [L] [S] = special services Hayabusa (JAXA) JUICE (ESA) Hubble Space Telescope [S][L] Kaguya (JAXA) Bepicolombo (ESA, JAXA) James Webb Space Telescope [S][L] LADEE Altius (Belgian earth science satellite) ISO [S] (ESA) Armadillo (CubeSat, by UT at Austin) Last updated: 1/7/20 Smart-1 (ESA) Deep Space Network Spectrum-RG (RSA) NAIF has or had project-supplied funding to support mission operations, consultation for flight team members, and SPICE data archive preparation. -

Mars Exploration - a Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani
Chapter Introductory Chapter: Mars Exploration - A Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani 1. Introduction Mars has been a goal of exploration programs of the most important space agencies all over the world for decades. It is, in fact, the most investigated celestial body of the Solar System. Mars robotic exploration began in the 1960s of the twentieth century by means of several space probes sent by the United States (US) and the Soviet Union (USSR). In the recent past, also European, Japanese, and Indian spacecrafts reached Mars; while other countries, such as China and the United Arab Emirates, aim to send spacecraft toward the red planet in the next future. 1.1 Exploration aims The high number of mission explorations to Mars clearly points out the impor- tance of Mars within the Solar System. Thus, the question is: “Why this great interest in Mars exploration?” The interest in Mars is due to several practical, scientific, and strategic reasons. In the practical sense, Mars is the most accessible planet in the Solar System [1]. It is the second closest planet to Earth, besides Venus, averaging about 360 million kilometers apart between the furthest and closest points in its orbit. Earth and Mars feature great similarities. For instance, both planets rotate on an axis with quite the same rotation velocity and tilt angle. The length of a day on Earth is 24 h, while slightly longer on Mars at 24 h and 37 min. The tilt of Earth axis is 23.5 deg, and Mars tilts slightly more at 25.2 deg [2]. -

Chang'e 5 Samples (Mexag) (Head-Final)
Chang’E 5 Lunar Sample Return Mission Update James w. Head Department of Earth, Environmental and Planetary Sciences Brown University Providence, RI 02912 USA Extraterrestrial Materials Analysis Group (ExMAG) Spring Meeting: April 7 - 8, 2021. Extraterrestrial Materials Analysis Group (ExMAG) Spring Meeting Barbara Cohen, ExMAG Chair. 2/10/21 • 1. Please provide an update on the Chang'e 5 Sample Return Mission. • 2. What is known of the collection so far? • 3. Please provide an overview of allocation procedures. • 4. Since US federally-funded researchers cannot work directly with China - Who outside of China is working with the mission team? • 5. We'd also appreciate your thoughts on: What NASA might be able to do to enable the US analysis community to collaborate on this sample collection? Extraterrestrial Materials Analysis Group (ExMAG) Spring Meeting Barbara Cohen, ExMAG Chair. 2/10/21 • 1. Some Myths and Realities. • 2. Organization of the Chinese Space Program. • 3. Chinese Lunar Exploration Program (CLEP) context for Chang’e 5. • 4. Chang’e 5 Landing Site Selection, Global Context, Key Questions, Mission Operations and Sample Return. • 5. Returned Sample Location, Storage, Preliminary Analysis and Distribution. • 6. Opportunities for International Cooperation. Extraterrestrial Materials Analysis Group (ExMAG) Spring Meeting Barbara Cohen, ExMAG Chair. 2/10/21 • 1. Some Myths and Realities. • 2. Organization of the Chinese Space Program. • 3. Chinese Lunar Exploration Program (CLEP) context for Chang’e 5. • 4. Chang’e 5 Landing Site Selection, Global Context, Key Questions, Mission Operations and Sample Return. • 5. Returned Sample Location, Storage, Preliminary Analysis and Distribution. • 6. Opportunities for International Cooperation. -

Cubex: a Compact X-Ray Telescope Enables Both X-Ray Fluorescence Imaging Spectroscopy and Pulsar Timing Based Navigation
SSC18-V-05 CubeX: A compact X-Ray Telescope Enables both X-Ray Fluorescence Imaging Spectroscopy and Pulsar Timing Based Navigation Jan Stupl, Monica Ebert, David Mauro SGT / NASA Ames NASA Ames Research Center, Moffett Field, CA; 650-604-4032 [email protected] JaeSub Hong Harvard University Cambridge, MA Suzanne Romaine, Almus Kenter, Janet Evans, Ralph Kraft Smithsonian Astrophysical Observatory Cambridge, MA Larry Nittler Carnegie Institution of Washington Washington, DC Ian Crawford Birkbeck College London, UK David Kring Lunar and Planetary Institute Houston, TX Noah Petro, Keith. Gendreau, Jason Mitchell, Luke Winternitz NASA Goddard Space Flight Center Greenbelt, MD Rebecca. Masterson, Gregory Prigozhin Massachusetts Institute of Technology Cambridge, MA Brittany Wickizer NASA Ames Research Center Moffett Field, CA Kellen Bonner, Ashley Clark, Arwen Dave, Andres Dono-Perez, Ali Kashani, Daniel Larrabee, Samuel Montez, Karolyn Ronzano, Tim Snyder MEI / NASA Ames Research Center Joel Mueting, Laura Plice Metis / NASA Ames Research Center NASA Ames Research Center, Moffett Field, CA Yueh-Liang Shen, Duy Nguyen Booz Allen Hamilton / NASA Ames NASA Ames Research Center, Moffett Field, CA Stupl 1 32nd Annual AIAA/USU Conference on Small Satellites ABSTRACT This paper describes the miniaturized X-ray telescope payload, CubeX, in the context of a lunar mission. The first part describes the payload in detail, the second part summarizes a small satellite mission concept that utilizes its compact form factor and performance. This instrument can be used for both X-ray fluorescence (XRF) imaging spectroscopy and X-ray pulsar timing-based navigation (XNAV). It combines high angular resolution (<1 arcminutes) Miniature Wolter-I X-ray optics (MiXO) with a common focal plane consisting of high spectral resolution (<150 eV at 1 keV) CMOS X-ray sensors and a high timing resolution (< 1 µsec) SDD X-ray sensor. -

Mars Science Laboratory Entry Capsule Aerothermodynamics and Thermal Protection System
Mars Science Laboratory Entry Capsule Aerothermodynamics and Thermal Protection System Karl T. Edquist ([email protected], 757-864-4566) Brian R. Hollis ([email protected], 757-864-5247) NASA Langley Research Center, Hampton, VA 23681 Artem A. Dyakonov ([email protected], 757-864-4121) National Institute of Aerospace, Hampton, VA 23666 Bernard Laub ([email protected], 650-604-5017) Michael J. Wright ([email protected], 650-604-4210) NASA Ames Research Center, Moffett Field, CA 94035 Tomasso P. Rivellini ([email protected], 818-354-5919) Eric M. Slimko ([email protected], 818-354-5940) Jet Propulsion Laboratory, Pasadena, CA 91109 William H. Willcockson ([email protected], 303-977-5094) Lockheed Martin Space Systems Company, Littleton, CO 80125 Abstract—The Mars Science Laboratory (MSL) spacecraft TABLE OF CONTENTS is being designed to carry a large rover (> 800 kg) to the 1. INTRODUCTION ..................................................... 1 surface of Mars using a blunt-body entry capsule as the 2. COMPUTATIONAL RESULTS ................................. 2 primary decelerator. The spacecraft is being designed for 3. EXPERIMENTAL RESULTS .................................... 5 launch in 2009 and arrival at Mars in 2010. The 4. TPS TESTING AND MODEL DEVELOPMENT.......... 7 combination of large mass and diameter with non-zero 5. SUMMARY ........................................................... 11 angle-of-attack for MSL will result in unprecedented REFERENCES........................................................... 11 convective heating environments caused by turbulence prior BIOGRAPHY ............................................................ 12 to peak heating. Navier-Stokes computations predict a large turbulent heating augmentation for which there are no supporting flight data1 and little ground data for validation. -

Report on the Loss of the Mars Polar Lander and Deep Space 2 Missions
Report on the Loss of the Mars Polar Lander and Deep Space 2 Missions JPL Special Review Board 22 March 2000 JPL D-18709 REPORT ON THE LOSS OF MARS POLAR LANDER / DEEP SPACE 2 JPL SPECIAL REVIEW BOARD — SIGNATURE PAGE — Mars Polar Lander/Deep Space 2 Loss — JPL Special Review Board Report JPL D-18709 — page iii CONTENTS List of Tables........................................................................................................................................ vii List of Figures ...................................................................................................................................... vii Acronyms and Abbreviations.............................................................................................................. viii EXECUTIVE SUMMARY................................................................................................... xi 1INTRODUCTION .......................................................................................................................... 1 1.1 Mars Surveyor Program ......................................................................................................................... 1 1.2 Loss of the Mars Climate Orbiter Mission ........................................................................................... 1 1.2.1 Investigation of the MCO Loss .................................................................................................................. 1 1.2.2 Post-MCO Corrective Actions for Mars Polar Lander ........................................................................... -
Managing Software Development – the Hidden Risk * Dr
Managing Software Development – The Hidden Risk * Dr. Steve Jolly Sensing & Exploration Systems Lockheed Martin Space Systems Company *Based largely on the work: “Is Software Broken?” by Steve Jolly, NASA ASK Magazine, Spring 2009; and the IEEE Fourth International Conference of System of Systems Engineering as “System of Systems in Space 1 Exploration: Is Software Broken?”, Steve Jolly, Albuquerque, New Mexico June 1, 2009 Brief history of spacecraft development • Example of the Mars Exploration Program – Danger – Real-time embedded systems challenge – Fault protection 2 Robotic Mars Exploration 2011 Mars Exploration Program Search: Search: Search: Determine: Characterize: Determine: Aqueous Subsurface Evidence for water Global Extent Subsurface Bio Potential Minerals Ice Found Found of Habitable Ice of Site 3 Found Environments Found In Work Image Credits: NASA/JPL Mars: Easy to Become Infamous … 1. [Unnamed], USSR, 10/10/60, Mars flyby, did not reach Earth orbit 2. [Unnamed], USSR, 10/14/60, Mars flyby, did not reach Earth orbit 3. [Unnamed], USSR, 10/24/62, Mars flyby, achieved Earth orbit only 4. Mars 1, USSR, 11/1/62, Mars flyby, radio failed 5. [Unnamed], USSR, 11/4/62, Mars flyby, achieved Earth orbit only 6. Mariner 3, U.S., 11/5/64, Mars flyby, shroud failed to jettison 7. Mariner 4, U.S. 11/28/64, first successful Mars flyby 7/14/65 8. Zond 2, USSR, 11/30/64, Mars flyby, passed Mars radio failed, no data 9. Mariner 6, U.S., 2/24/69, Mars flyby 7/31/69, returned 75 photos 10. Mariner 7, U.S., 3/27/69, Mars flyby 8/5/69, returned 126 photos 11. -
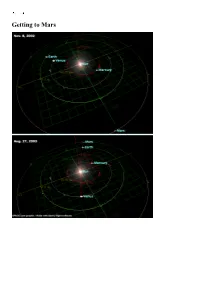
Getting to Mars How Close Is Mars?
Getting to Mars How close is Mars? Exploring Mars 1960-2004 Of 42 probes launched: 9 crashed on launch or failed to leave Earth orbit 4 failed en route to Mars 4 failed to stop at Mars 1 failed on entering Mars orbit 1 orbiter crashed on Mars 6 landers crashed on Mars 3 flyby missions succeeded 9 orbiters succeeded 4 landers succeeded 1 lander en route Score so far: Earthlings 16, Martians 25, 1 in play Mars Express Mars Exploration Rover Mars Exploration Rover Mars Exploration Rover 1: Meridiani (Opportunity) 2: Gusev (Spirit) 3: Isidis (Beagle-2) 4: Mars Polar Lander Launch Window 21: Jun-Jul 2003 Mars Express 2003 Jun 2 In Mars orbit Dec 25 Beagle 2 Lander 2003 Jun 2 Crashed at Isidis Dec 25 Spirit/ Rover A 2003 Jun 10 Landed at Gusev Jan 4 Opportunity/ Rover B 2003 Jul 8 Heading to Meridiani on Sunday Launch Window 1: Oct 1960 1M No. 1 1960 Oct 10 Rocket crashed in Siberia 1M No. 2 1960 Oct 14 Rocket crashed in Kazakhstan Launch Window 2: October-November 1962 2MV-4 No. 1 1962 Oct 24 Rocket blew up in parking orbit during Cuban Missile Crisis 2MV-4 No. 2 "Mars-1" 1962 Nov 1 Lost attitude control - Missed Mars by 200000 km 2MV-3 No. 1 1962 Nov 4 Rocket failed to restart in parking orbit The Mars-1 probe Launch Window 3: November 1964 Mariner 3 1964 Nov 5 Failed after launch, nose cone failed to separate Mariner 4 1964 Nov 28 SUCCESS, flyby in Jul 1965 3MV-4 No.