Managing Software Development – the Hidden Risk * Dr
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Reit) Hydrology \-Th,C),^:::Th
Icru j Institute of 'reit) Hydrology \-Th,c),^:::Th Natural Environment Research Council Environment Research A CouncilNatural • • • • • • • • • SADC-HYCOS • HYDATAv4.0trainingcourse • PRCPretoria,SouthAfrica 28July-6August1998 • • • • • • • • • • Institute of Hydrology Maclean Building Crowmarsh Gifford Wallingford Oxon OXIO 81313 • Tel: 01491 838800 Fax: 01491 692424 • Telex: 849365 HYDROL, G September 1998 • • •••••••••••••••••••••••••••••••••• Summary 111 A key stage in the implementation of the SADC-HYCOS projcct involves establishing a regional database system. Thc database selected was the Institute of Hydrology's HYDATA system. HYDATA is uscd in more than 50 countries worldwide, and is the national database system for surface water data in more than 20 countries, including many of the SADC countries. A ncw Windows version of HYDATA (v4.0) is near release (scheduled January 1999), and provides several improvements over the original DOS-bascd system. It was agreed that HYDATA v4.0 would be provided to each National Hydrological Agency for the SADC- HYCOS project, and that a 2-week training course would be held in Pretoria, South Africa. The first HYDATA v4.0 training course was held at the DWAF training centre in Pretoria between 28 July and 6 August 1998. The course was attended by 16 delegates from 1 I different countries. This report provides a record of the course and the software and training provided. •••••••••••••••••••••••••••••••••• Contents • Page • 1. INTRODUCTION 1 • 1.1Background to SADC-HYCOS 1.2 Background to HYDATA 1.3Background to course 2 2 THE HYDATA TRAINING COURSE 3 • 2.1The HYDATA v4.0 training course 3 • 2.2Visit to DWAF offices 4 • 3. CONCLUSIONS AND FUTURE PLANS 5 • APPENDIX A:RECEIPTS FOR HYDATA v4.0 SOFTWARE 6 • APPENDIX B:PROGRAMME OF VISIT 7 • APPENDIX C:LIST OF TRAINING COURSE PARTICIPANTS 9 • APPENDIX D:LIST OF SOFTWARE BUGS 10 ••••••••••••0-••••••••••••••••••••• • • 1. -

An In-Depth Study with All Rust Cves
Memory-Safety Challenge Considered Solved? An In-Depth Study with All Rust CVEs HUI XU, School of Computer Science, Fudan University ZHUANGBIN CHEN, Dept. of CSE, The Chinese University of Hong Kong MINGSHEN SUN, Baidu Security YANGFAN ZHOU, School of Computer Science, Fudan University MICHAEL R. LYU, Dept. of CSE, The Chinese University of Hong Kong Rust is an emerging programing language that aims at preventing memory-safety bugs without sacrificing much efficiency. The claimed property is very attractive to developers, and many projects start usingthe language. However, can Rust achieve the memory-safety promise? This paper studies the question by surveying 186 real-world bug reports collected from several origins which contain all existing Rust CVEs (common vulnerability and exposures) of memory-safety issues by 2020-12-31. We manually analyze each bug and extract their culprit patterns. Our analysis result shows that Rust can keep its promise that all memory-safety bugs require unsafe code, and many memory-safety bugs in our dataset are mild soundness issues that only leave a possibility to write memory-safety bugs without unsafe code. Furthermore, we summarize three typical categories of memory-safety bugs, including automatic memory reclaim, unsound function, and unsound generic or trait. While automatic memory claim bugs are related to the side effect of Rust newly-adopted ownership-based resource management scheme, unsound function reveals the essential challenge of Rust development for avoiding unsound code, and unsound generic or trait intensifies the risk of introducing unsoundness. Based on these findings, we propose two promising directions towards improving the security of Rust development, including several best practices of using specific APIs and methods to detect particular bugs involving unsafe code. -

Phobos, Deimos: Formation and Evolution Alex Soumbatov-Gur
Phobos, Deimos: Formation and Evolution Alex Soumbatov-Gur To cite this version: Alex Soumbatov-Gur. Phobos, Deimos: Formation and Evolution. [Research Report] Karpov institute of physical chemistry. 2019. hal-02147461 HAL Id: hal-02147461 https://hal.archives-ouvertes.fr/hal-02147461 Submitted on 4 Jun 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Phobos, Deimos: Formation and Evolution Alex Soumbatov-Gur The moons are confirmed to be ejected parts of Mars’ crust. After explosive throwing out as cone-like rocks they plastically evolved with density decays and materials transformations. Their expansion evolutions were accompanied by global ruptures and small scale rock ejections with concurrent crater formations. The scenario reconciles orbital and physical parameters of the moons. It coherently explains dozens of their properties including spectra, appearances, size differences, crater locations, fracture symmetries, orbits, evolution trends, geologic activity, Phobos’ grooves, mechanism of their origin, etc. The ejective approach is also discussed in the context of observational data on near-Earth asteroids, main belt asteroids Steins, Vesta, and Mars. The approach incorporates known fission mechanism of formation of miniature asteroids, logically accounts for its outliers, and naturally explains formations of small celestial bodies of various sizes. -

Oxygen Exosphere of Mars: Evidence from Pickup Ions Measured By
Oxygen Exosphere of Mars: Evidence from Pickup Ions Measured by MAVEN By Ali Rahmati Submitted to the graduate degree program in the Department of Physics and Astronomy, and the Graduate Faculty of the University of Kansas in partial fulfillment of the requirements for the degree of Doctor of Philosophy. ________________________________ Professor Thomas E. Cravens, Chair ________________________________ Professor Philip S. Baringer ________________________________ Professor David Braaten ________________________________ Professor Mikhail V. Medvedev ________________________________ Professor Stephen J. Sanders Date Defended: 22 January 2016 The Dissertation Committee for Ali Rahmati certifies that this is the approved version of the following dissertation: Oxygen Exosphere of Mars: Evidence from Pickup Ions Measured by MAVEN ________________________________ Professor Thomas E. Cravens, Chair Date approved: 22 January 2016 ii Abstract Mars possesses a hot oxygen exosphere that extends out to several Martian radii. The main source for populating this extended exosphere is the dissociative recombination of molecular oxygen ions with electrons in the Mars ionosphere. The dissociative recombination reaction creates two hot oxygen atoms that can gain energies above the escape energy at Mars and escape from the planet. Oxygen loss through this photochemical reaction is thought to be one of the main mechanisms of atmosphere escape at Mars, leading to the disappearance of water on the surface. In this work the hot oxygen exosphere of Mars is modeled using a two-stream/Liouville approach as well as a Monte-Carlo simulation. The modeled exosphere is used in a pickup ion simulation to predict the flux of energetic oxygen pickup ions at Mars. The pickup ions are created via ionization of neutral exospheric oxygen atoms through photo-ionization, charge exchange with solar wind protons, and electron impact ionization. -

Tianwen-1: China's Mars Mission
Tianwen-1: China's Mars Mission drishtiias.com/printpdf/tianwen-1-china-s-mars-mission Why In News China will launch its first Mars Mission - Tianwen-1- in July, 2020. China's previous ‘Yinghuo-1’ Mars mission, which was supported by a Russian spacecraft, had failed after it did not leave the earth's orbit and disintegrated over the Pacific Ocean in 2012. The National Aeronautics and Space Administration (NASA) is also going to launch its own Mars mission in July, the Perseverance which aims to collect Martian samples. Key Points The Tianwen-1 Mission: It will lift off on a Long March 5 rocket, from the Wenchang launch centre. It will carry 13 payloads (seven orbiters and six rovers) that will explore the planet. It is an all-in-one orbiter, lander and rover system. Orbiter: It is a spacecraft designed to orbit a celestial body (astronomical body) without landing on its surface. Lander: It is a strong, lightweight spacecraft structure, consisting of a base and three sides "petals" in the shape of a tetrahedron (pyramid- shaped). It is a protective "shell" that houses the rover and protects it, along with the airbags, from the forces of impact. Rover: It is a planetary surface exploration device designed to move across the solid surface on a planet or other planetary mass celestial bodies. 1/3 Objectives: The mission will be the first to place a ground-penetrating radar on the Martian surface, which will be able to study local geology, as well as rock, ice, and dirt distribution. It will search the martian surface for water, investigate soil characteristics, and study the atmosphere. -

Why Do We Explore?
Why Do We Explore? Lesson Six Why Do We Explore? About This Lesson Students will work in small teams, each of which will be given a different reason why humans explore. Each team will become the expert on their one reason and will add a letter and summary sentence to an EXPLORE poster using their reason for exploration. With all the reasons on the poster, the word EXPLORE will be complete. Students will be using the skills of working in cooperative learning teams, reading, summarizing, paraphrasing, and creating a sentence that will best represent their reason for exploration. Students will also be illustrating and copying other teams sentences so that each student will have a small copy of the large class- room poster for reference or extension purposes. The teacher will lead a discussion that relates the reasons humans explore to the planned and possible future missions to Mars. Objectives Students will: v review the seven traditional reasons why people explore v write a summary of their reason why humans explore v illustrate their exploration summaries v relate the reasons for exploration to the missions to Mars Background Students do not always realize that the steps in future exploration are built on a tradition of Why Do We Explore? exploration that is as old as humans. This lesson is intended to introduce the concept of exploration through the seven traditional reasons that express why humans have always been explorers. Social scientists know that everyone, no matter how young or old, is constantly exploring the world and how it works. Space exploration, including the possible missions to Mars, has opened up a whole new world for us to explore. -

Mars Exploration: an Overview of Indian and International Mars Missions Nayamavalsa Scariah1, Dr
Taurian Innovative Journal/Volume 1/ Issue 1 Mars exploration: An overview of Indian and International Mars Missions NayamaValsa Scariah1, Dr. Mili Ghosh2, Dr.A.P.Krishna3 Birla Institute of Technology, Mesra, Ranchi Abstract- Mars is the fourth planet from the sun. It is 1. Introduction also known as red planet because of its iron oxide content. There are lots of missions have been launched to Mars is also known as red planet, because of the mars for better understanding of our neighboring planet. reddish iron oxide prevalent on its surface gives it a There are lots of unmanned spacecraft including reddish appearance. It is the fourth planet from sun. orbiters, landers and rovers have been launched into mars since early 1960. Sputnik was the first satellite The term sol is used to define duration of solar day on launched in 1957 by Soviet Union. After seven failure Mars. A mean Martian solar day or sol is 24 hours 39 missions to Mars, Mariner 4 was the first satellite which minutes and 34.244 seconds. Many space missions to reached the Martian orbiter successfully. The Viking 1 Mars have been planned and launched for Mars was the first lander reached on Mars on 1975. India exploration (Table:1) but most of them failed without successfully launched a spacecraft, Mangalyan (Mars completing the task specially in early attempts th Orbiter Mission) on 5 November, 2013, with five whereas some NASA missions were very payloads to Mars. India was the first nation to successful(such as the twin Mars Exploration Rovers, successfully reach Mars on its first attempt. -

Appendix 1: Venus Missions
Appendix 1: Venus Missions Sputnik 7 (USSR) Launch 02/04/1961 First attempted Venus atmosphere craft; upper stage failed to leave Earth orbit Venera 1 (USSR) Launch 02/12/1961 First attempted flyby; contact lost en route Mariner 1 (US) Launch 07/22/1961 Attempted flyby; launch failure Sputnik 19 (USSR) Launch 08/25/1962 Attempted flyby, stranded in Earth orbit Mariner 2 (US) Launch 08/27/1962 First successful Venus flyby Sputnik 20 (USSR) Launch 09/01/1962 Attempted flyby, upper stage failure Sputnik 21 (USSR) Launch 09/12/1962 Attempted flyby, upper stage failure Cosmos 21 (USSR) Launch 11/11/1963 Possible Venera engineering test flight or attempted flyby Venera 1964A (USSR) Launch 02/19/1964 Attempted flyby, launch failure Venera 1964B (USSR) Launch 03/01/1964 Attempted flyby, launch failure Cosmos 27 (USSR) Launch 03/27/1964 Attempted flyby, upper stage failure Zond 1 (USSR) Launch 04/02/1964 Venus flyby, contact lost May 14; flyby July 14 Venera 2 (USSR) Launch 11/12/1965 Venus flyby, contact lost en route Venera 3 (USSR) Launch 11/16/1965 Venus lander, contact lost en route, first Venus impact March 1, 1966 Cosmos 96 (USSR) Launch 11/23/1965 Possible attempted landing, craft fragmented in Earth orbit Venera 1965A (USSR) Launch 11/23/1965 Flyby attempt (launch failure) Venera 4 (USSR) Launch 06/12/1967 Successful atmospheric probe, arrived at Venus 10/18/1967 Mariner 5 (US) Launch 06/14/1967 Successful flyby 10/19/1967 Cosmos 167 (USSR) Launch 06/17/1967 Attempted atmospheric probe, stranded in Earth orbit Venera 5 (USSR) Launch 01/05/1969 Returned atmospheric data for 53 min on 05/16/1969 M. -
List of Missions Using SPICE (PDF)
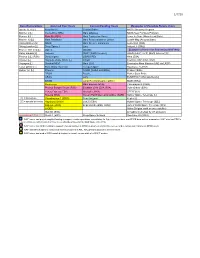
1/7/20 Data Restorations Selected Past Users Current/Pending Users Examples of Possible Future Users Apollo 15, 16 [L] Magellan [L] Cassini Orbiter NASA Discovery Program Mariner 2 [L] Clementine (NRL) Mars Odyssey NASA New Frontiers Program Mariner 9 [L] Mars 96 (RSA) Mars Exploration Rover Lunar IceCube (Moorehead State) Mariner 10 [L] Mars Pathfinder Mars Reconnaissance Orbiter LunaH-Map (Arizona State) Viking Orbiters [L] NEAR Mars Science Laboratory Luna-Glob (RSA) Viking Landers [L] Deep Space 1 Juno Aditya-L1 (ISRO) Pioneer 10/11/12 [L] Galileo MAVEN Examples of Users not Requesting NAIF Help Haley armada [L] Genesis SMAP (Earth Science) GOLD (LASP, UCF) (Earth Science) [L] Phobos 2 [L] (RSA) Deep Impact OSIRIS REx Hera (ESA) Ulysses [L] Huygens Probe (ESA) [L] InSight ExoMars RSP (ESA, RSA) Voyagers [L] Stardust/NExT Mars 2020 Emmirates Mars Mission (UAE via LASP) Lunar Orbiter [L] Mars Global Surveyor Europa Clipper Hayabusa-2 (JAXA) Helios 1,2 [L] Phoenix NISAR (NASA and ISRO) Proba-3 (ESA) EPOXI Psyche Parker Solar Probe GRAIL Lucy EUMETSAT GEO satellites [L] DAWN Lunar Reconnaissance Orbiter MOM (ISRO) Messenger Mars Express (ESA) Chandrayan-2 (ISRO) Phobos Sample Return (RSA) ExoMars 2016 (ESA, RSA) Solar Orbiter (ESA) Venus Express (ESA) Akatsuki (JAXA) STEREO [L] Rosetta (ESA) Korean Pathfinder Lunar Orbiter (KARI) Spitzer Space Telescope [L] [L] = limited use Chandrayaan-1 (ISRO) New Horizons Kepler [L] [S] = special services Hayabusa (JAXA) JUICE (ESA) Hubble Space Telescope [S][L] Kaguya (JAXA) Bepicolombo (ESA, JAXA) James Webb Space Telescope [S][L] LADEE Altius (Belgian earth science satellite) ISO [S] (ESA) Armadillo (CubeSat, by UT at Austin) Last updated: 1/7/20 Smart-1 (ESA) Deep Space Network Spectrum-RG (RSA) NAIF has or had project-supplied funding to support mission operations, consultation for flight team members, and SPICE data archive preparation. -

Mariner to Mercury, Venus and Mars
NASA Facts National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, CA 91109 Mariner to Mercury, Venus and Mars Between 1962 and late 1973, NASA’s Jet carry a host of scientific instruments. Some of the Propulsion Laboratory designed and built 10 space- instruments, such as cameras, would need to be point- craft named Mariner to explore the inner solar system ed at the target body it was studying. Other instru- -- visiting the planets Venus, Mars and Mercury for ments were non-directional and studied phenomena the first time, and returning to Venus and Mars for such as magnetic fields and charged particles. JPL additional close observations. The final mission in the engineers proposed to make the Mariners “three-axis- series, Mariner 10, flew past Venus before going on to stabilized,” meaning that unlike other space probes encounter Mercury, after which it returned to Mercury they would not spin. for a total of three flybys. The next-to-last, Mariner Each of the Mariner projects was designed to have 9, became the first ever to orbit another planet when two spacecraft launched on separate rockets, in case it rached Mars for about a year of mapping and mea- of difficulties with the nearly untried launch vehicles. surement. Mariner 1, Mariner 3, and Mariner 8 were in fact lost The Mariners were all relatively small robotic during launch, but their backups were successful. No explorers, each launched on an Atlas rocket with Mariners were lost in later flight to their destination either an Agena or Centaur upper-stage booster, and planets or before completing their scientific missions. -
Combinatorics in Space
Combinatorics in Space The Mariner 9 Telemetry System Mariner 9 Mission Launched: May 30, 1971 Arrived: Nov. 14, 1971 Turned Off: Oct. 27, 1972 Mission Objectives: (Mariner 8): Map 70% of Martian surface. (Mariner 9): Study temporal changes in Martian atmosphere and surface features. Live TV A black and white TV camera was used to broadcast “live” pictures of the Martian surface. Each photo-receptor in the camera measures the brightness of a section of the Martian surface about 4-5 km square, and outputs a grayness value in the range 0-63. This value is represented as a binary 6-tuple. The TV image is thus digitalized by the photo-receptor bank and is output as a stream of thousands of binary 6-tuples. Coding Needed Without coding and a failure probability p = 0.05, 26% of the image would be in error ... unacceptably poor quality for the nature of the mission. Any coding will increase the length of the transmitted message. Due to power constraints on board the probe and equipment constraints at the receiving stations on Earth, the coded message could not be much more than 5 times as long as the data. Thus, a 6-tuple of data could be coded as a codeword of about 30 bits in length. Other concerns A second concern involves the coding procedure. Storage of data requires shielding of the storage media – this is dead weight aboard the probe and economics require that there be little dead weight. Coding should therefore be done “on the fly”, without permanent memory requirements. -

Mars Exploration - a Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani
Chapter Introductory Chapter: Mars Exploration - A Story Fifty Years Long Giuseppe Pezzella and Antonio Viviani 1. Introduction Mars has been a goal of exploration programs of the most important space agencies all over the world for decades. It is, in fact, the most investigated celestial body of the Solar System. Mars robotic exploration began in the 1960s of the twentieth century by means of several space probes sent by the United States (US) and the Soviet Union (USSR). In the recent past, also European, Japanese, and Indian spacecrafts reached Mars; while other countries, such as China and the United Arab Emirates, aim to send spacecraft toward the red planet in the next future. 1.1 Exploration aims The high number of mission explorations to Mars clearly points out the impor- tance of Mars within the Solar System. Thus, the question is: “Why this great interest in Mars exploration?” The interest in Mars is due to several practical, scientific, and strategic reasons. In the practical sense, Mars is the most accessible planet in the Solar System [1]. It is the second closest planet to Earth, besides Venus, averaging about 360 million kilometers apart between the furthest and closest points in its orbit. Earth and Mars feature great similarities. For instance, both planets rotate on an axis with quite the same rotation velocity and tilt angle. The length of a day on Earth is 24 h, while slightly longer on Mars at 24 h and 37 min. The tilt of Earth axis is 23.5 deg, and Mars tilts slightly more at 25.2 deg [2].