Combinatorics in Space
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Appendix 1: Venus Missions
Appendix 1: Venus Missions Sputnik 7 (USSR) Launch 02/04/1961 First attempted Venus atmosphere craft; upper stage failed to leave Earth orbit Venera 1 (USSR) Launch 02/12/1961 First attempted flyby; contact lost en route Mariner 1 (US) Launch 07/22/1961 Attempted flyby; launch failure Sputnik 19 (USSR) Launch 08/25/1962 Attempted flyby, stranded in Earth orbit Mariner 2 (US) Launch 08/27/1962 First successful Venus flyby Sputnik 20 (USSR) Launch 09/01/1962 Attempted flyby, upper stage failure Sputnik 21 (USSR) Launch 09/12/1962 Attempted flyby, upper stage failure Cosmos 21 (USSR) Launch 11/11/1963 Possible Venera engineering test flight or attempted flyby Venera 1964A (USSR) Launch 02/19/1964 Attempted flyby, launch failure Venera 1964B (USSR) Launch 03/01/1964 Attempted flyby, launch failure Cosmos 27 (USSR) Launch 03/27/1964 Attempted flyby, upper stage failure Zond 1 (USSR) Launch 04/02/1964 Venus flyby, contact lost May 14; flyby July 14 Venera 2 (USSR) Launch 11/12/1965 Venus flyby, contact lost en route Venera 3 (USSR) Launch 11/16/1965 Venus lander, contact lost en route, first Venus impact March 1, 1966 Cosmos 96 (USSR) Launch 11/23/1965 Possible attempted landing, craft fragmented in Earth orbit Venera 1965A (USSR) Launch 11/23/1965 Flyby attempt (launch failure) Venera 4 (USSR) Launch 06/12/1967 Successful atmospheric probe, arrived at Venus 10/18/1967 Mariner 5 (US) Launch 06/14/1967 Successful flyby 10/19/1967 Cosmos 167 (USSR) Launch 06/17/1967 Attempted atmospheric probe, stranded in Earth orbit Venera 5 (USSR) Launch 01/05/1969 Returned atmospheric data for 53 min on 05/16/1969 M. -

ROVING ACROSS MARS: SEARCHING for EVIDENCE of FORMER HABITABLE ENVIRONMENTS Michael H
PERSPECTIVE ROVING ACROSS MARS: SEARCHING FOR EVIDENCE OF FORMER HABITABLE ENVIRONMENTS Michael H. Carr* My love affair with Mars started in the late 1960s when I was appointed a member of the Mariner 9 and Viking Orbiter imaging teams. The global surveys of these two missions revealed a geological wonderland in which many of the geological processes that operate here on Earth operate also on Mars, but on a grander scale. I was subsequently involved in almost every Mars mission, both US and non- US, through the early 2000s, and wrote several books on Mars, most recently The Surface of Mars (Carr 2006). I also participated extensively in NASA’s long-range strategic planning for Mars exploration, including assessment of the merits of various techniques, such as penetrators, Mars rovers showing their evolution from 1996 to the present day. FIGURE 1 balloons, airplanes, and rovers. I am, therefore, following the results In the foreground is the tethered rover, Sojourner, launched in 1996. On the left is a model of the rovers Spirit and Opportunity, launched in 2004. from Curiosity with considerable interest. On the right is Curiosity, launched in 2011. IMAGE CREDIT: NASA/JPL-CALTECH The six papers in this issue outline some of the fi ndings of the Mars rover Curiosity, which has spent the last two years on the Martian surface looking for evidence of past habitable conditions. It is not the fi rst rover to explore Mars, but it is by far the most capable (FIG. 1). modest-sized landed vehicles. Advances in guidance enabled landing Included on the vehicle are a number of cameras, an alpha particle at more interesting and promising places, and advances in robotics led X-ray spectrometer (APXS) for contact elemental composition, a spec- to vehicles with more independent capabilities. -

Mariner to Mercury, Venus and Mars
NASA Facts National Aeronautics and Space Administration Jet Propulsion Laboratory California Institute of Technology Pasadena, CA 91109 Mariner to Mercury, Venus and Mars Between 1962 and late 1973, NASA’s Jet carry a host of scientific instruments. Some of the Propulsion Laboratory designed and built 10 space- instruments, such as cameras, would need to be point- craft named Mariner to explore the inner solar system ed at the target body it was studying. Other instru- -- visiting the planets Venus, Mars and Mercury for ments were non-directional and studied phenomena the first time, and returning to Venus and Mars for such as magnetic fields and charged particles. JPL additional close observations. The final mission in the engineers proposed to make the Mariners “three-axis- series, Mariner 10, flew past Venus before going on to stabilized,” meaning that unlike other space probes encounter Mercury, after which it returned to Mercury they would not spin. for a total of three flybys. The next-to-last, Mariner Each of the Mariner projects was designed to have 9, became the first ever to orbit another planet when two spacecraft launched on separate rockets, in case it rached Mars for about a year of mapping and mea- of difficulties with the nearly untried launch vehicles. surement. Mariner 1, Mariner 3, and Mariner 8 were in fact lost The Mariners were all relatively small robotic during launch, but their backups were successful. No explorers, each launched on an Atlas rocket with Mariners were lost in later flight to their destination either an Agena or Centaur upper-stage booster, and planets or before completing their scientific missions. -

Seasonal and Interannual Variability of Solar Radiation at Spirit, Opportunity and Curiosity Landing Sites
Seasonal and interannual variability of solar radiation at Spirit, Opportunity and Curiosity landing sites Álvaro VICENTE-RETORTILLO1, Mark T. LEMMON2, Germán M. MARTÍNEZ3, Francisco VALERO4, Luis VÁZQUEZ5, Mª Luisa MARTÍN6 1Departamento de Física de la Tierra, Astronomía y Astrofísica II, Universidad Complutense de Madrid, Madrid, Spain, [email protected]. 2Department of Atmospheric Sciences, Texas A&M University, College Station, TX, USA, [email protected]. 3Department of Climate and Space Sciences and Engineering, University of Michigan, Ann Arbor, MI, USA, [email protected]. 4Departamento de Física de la Tierra, Astronomía y Astrofísica II, Universidad Complutense de Madrid, Madrid, Spain, [email protected]. 5Departamento de Matemática Aplicada, Universidad Complutense de Madrid, Madrid, Spain, [email protected]. 6Departamento de Matemática Aplicada, Universidad de Valladolid, Segovia, Spain, [email protected]. Received: 14/04/2016 Accepted: 22/09/2016 Abstract In this article we characterize the radiative environment at the landing sites of NASA's Mars Exploration Rover (MER) and Mars Science Laboratory (MSL) missions. We use opacity values obtained at the surface from direct imaging of the Sun and our radiative transfer model COMIMART to analyze the seasonal and interannual variability of the daily irradiation at the MER and MSL landing sites. In addition, we analyze the behavior of the direct and diffuse components of the solar radiation at these landing sites. Key words: Solar radiation; Mars Exploration Rovers; Mars Science Laboratory; opacity, dust; radiative transfer model; Mars exploration. Variabilidad estacional e interanual de la radiación solar en las coordenadas de aterrizaje de Spirit, Opportunity y Curiosity Resumen El presente artículo está dedicado a la caracterización del entorno radiativo en los lugares de aterrizaje de las misiones de la NASA de Mars Exploration Rover (MER) y de Mars Science Laboratory (MSL). -

Pre-Mission Insights on the Interior of Mars Suzanne E
Pre-mission InSights on the Interior of Mars Suzanne E. Smrekar, Philippe Lognonné, Tilman Spohn, W. Bruce Banerdt, Doris Breuer, Ulrich Christensen, Véronique Dehant, Mélanie Drilleau, William Folkner, Nobuaki Fuji, et al. To cite this version: Suzanne E. Smrekar, Philippe Lognonné, Tilman Spohn, W. Bruce Banerdt, Doris Breuer, et al.. Pre-mission InSights on the Interior of Mars. Space Science Reviews, Springer Verlag, 2019, 215 (1), pp.1-72. 10.1007/s11214-018-0563-9. hal-01990798 HAL Id: hal-01990798 https://hal.archives-ouvertes.fr/hal-01990798 Submitted on 23 Jan 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Open Archive Toulouse Archive Ouverte (OATAO ) OATAO is an open access repository that collects the wor of some Toulouse researchers and ma es it freely available over the web where possible. This is an author's version published in: https://oatao.univ-toulouse.fr/21690 Official URL : https://doi.org/10.1007/s11214-018-0563-9 To cite this version : Smrekar, Suzanne E. and Lognonné, Philippe and Spohn, Tilman ,... [et al.]. Pre-mission InSights on the Interior of Mars. (2019) Space Science Reviews, 215 (1). -
Phil Liebrecht Assistant Deputy Associate Administrator and Deputy Program Manager Space Communications and Navigation NASA HQ
Phil Liebrecht Assistant Deputy Associate Administrator and Deputy Program Manager Space Communications and Navigation NASA HQ Meeting the Communications and Navigation Needs of Space missions since 1957 “Keeping the Universe Connected” Public University of Navarra, 2010 [email protected] 1 Operations and Communications Customers 2 Space Operations 101 Relation Between Space Segment, Ground System, and Data Users* Ground System Command Commands Requests Spacecraft and Payload Support • Mission Planning Telemetry • Flight Operations • Flight Dynamics • Perf. Assess., Trending & Archiving Space Data Users • Anomaly Support Segment Data Relay and Level (S/C) Mission Zero Data Processing Mission Data Data • Space-to-ground Comm. • Data Capture • Data Processing • Network Management • Data Distribution • Quick Look * Based on Wertz and Wiley; Space Mission Analysis and Design 3 Communications Theory- Basic Concepts Transmitter and Receiver must use the same language Noise causes interference a) Figures it – no errors (Identify and quantify) b) Figures it – corrects Must be loud enough ENERGY! c) Figures it – incorrectly (message in error) d) Cannot figure- recognizes E L an error T M E XP AIN L E e) Cannot figure- ? TRANSMITTER Distance weakens the sound RECEIVER (calculate the loss) CHANNEL Has to correctly interpret the message - the most difficult job The fundamental problem of communications is that of reproducing at one point either exactly or approximately a message selected at another point. 4 Functional - End to End Process -
Managing Software Development – the Hidden Risk * Dr
Managing Software Development – The Hidden Risk * Dr. Steve Jolly Sensing & Exploration Systems Lockheed Martin Space Systems Company *Based largely on the work: “Is Software Broken?” by Steve Jolly, NASA ASK Magazine, Spring 2009; and the IEEE Fourth International Conference of System of Systems Engineering as “System of Systems in Space 1 Exploration: Is Software Broken?”, Steve Jolly, Albuquerque, New Mexico June 1, 2009 Brief history of spacecraft development • Example of the Mars Exploration Program – Danger – Real-time embedded systems challenge – Fault protection 2 Robotic Mars Exploration 2011 Mars Exploration Program Search: Search: Search: Determine: Characterize: Determine: Aqueous Subsurface Evidence for water Global Extent Subsurface Bio Potential Minerals Ice Found Found of Habitable Ice of Site 3 Found Environments Found In Work Image Credits: NASA/JPL Mars: Easy to Become Infamous … 1. [Unnamed], USSR, 10/10/60, Mars flyby, did not reach Earth orbit 2. [Unnamed], USSR, 10/14/60, Mars flyby, did not reach Earth orbit 3. [Unnamed], USSR, 10/24/62, Mars flyby, achieved Earth orbit only 4. Mars 1, USSR, 11/1/62, Mars flyby, radio failed 5. [Unnamed], USSR, 11/4/62, Mars flyby, achieved Earth orbit only 6. Mariner 3, U.S., 11/5/64, Mars flyby, shroud failed to jettison 7. Mariner 4, U.S. 11/28/64, first successful Mars flyby 7/14/65 8. Zond 2, USSR, 11/30/64, Mars flyby, passed Mars radio failed, no data 9. Mariner 6, U.S., 2/24/69, Mars flyby 7/31/69, returned 75 photos 10. Mariner 7, U.S., 3/27/69, Mars flyby 8/5/69, returned 126 photos 11. -
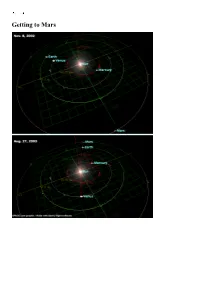
Getting to Mars How Close Is Mars?
Getting to Mars How close is Mars? Exploring Mars 1960-2004 Of 42 probes launched: 9 crashed on launch or failed to leave Earth orbit 4 failed en route to Mars 4 failed to stop at Mars 1 failed on entering Mars orbit 1 orbiter crashed on Mars 6 landers crashed on Mars 3 flyby missions succeeded 9 orbiters succeeded 4 landers succeeded 1 lander en route Score so far: Earthlings 16, Martians 25, 1 in play Mars Express Mars Exploration Rover Mars Exploration Rover Mars Exploration Rover 1: Meridiani (Opportunity) 2: Gusev (Spirit) 3: Isidis (Beagle-2) 4: Mars Polar Lander Launch Window 21: Jun-Jul 2003 Mars Express 2003 Jun 2 In Mars orbit Dec 25 Beagle 2 Lander 2003 Jun 2 Crashed at Isidis Dec 25 Spirit/ Rover A 2003 Jun 10 Landed at Gusev Jan 4 Opportunity/ Rover B 2003 Jul 8 Heading to Meridiani on Sunday Launch Window 1: Oct 1960 1M No. 1 1960 Oct 10 Rocket crashed in Siberia 1M No. 2 1960 Oct 14 Rocket crashed in Kazakhstan Launch Window 2: October-November 1962 2MV-4 No. 1 1962 Oct 24 Rocket blew up in parking orbit during Cuban Missile Crisis 2MV-4 No. 2 "Mars-1" 1962 Nov 1 Lost attitude control - Missed Mars by 200000 km 2MV-3 No. 1 1962 Nov 4 Rocket failed to restart in parking orbit The Mars-1 probe Launch Window 3: November 1964 Mariner 3 1964 Nov 5 Failed after launch, nose cone failed to separate Mariner 4 1964 Nov 28 SUCCESS, flyby in Jul 1965 3MV-4 No. -

Mars Insight Launch Press Kit
Introduction National Aeronautics and Space Administration Mars InSight Launch Press Kit MAY 2018 www.nasa.gov 1 2 Table of Contents Table of Contents Introduction 4 Media Services 8 Quick Facts: Launch Facts 12 Quick Facts: Mars at a Glance 16 Mission: Overview 18 Mission: Spacecraft 30 Mission: Science 40 Mission: Landing Site 53 Program & Project Management 55 Appendix: Mars Cube One Tech Demo 56 Appendix: Gallery 60 Appendix: Science Objectives, Quantified 62 Appendix: Historical Mars Missions 63 Appendix: NASA’s Discovery Program 65 3 Introduction Mars InSight Launch Press Kit Introduction NASA’s next mission to Mars -- InSight -- will launch from Vandenberg Air Force Base in California as early as May 5, 2018. It is expected to land on the Red Planet on Nov. 26, 2018. InSight is a mission to Mars, but it is more than a Mars mission. It will help scientists understand the formation and early evolution of all rocky planets, including Earth. A technology demonstration called Mars Cube One (MarCO) will share the launch with InSight and fly separately to Mars. Six Ways InSight Is Different NASA has a long and successful track record at Mars. Since 1965, it has flown by, orbited, landed and roved across the surface of the Red Planet. None of that has been easy. Only about 40 percent of the missions ever sent to Mars by any space agency have been successful. The planet’s thin atmosphere makes landing a challenge; its extreme temperature swings make it difficult to operate on the surface. But if a spacecraft survives the trip, there’s a bounty of science to be collected. -

Modeling Sharad Echoes from Hirise-Derived Stratigraphy of the Northern Polar Layered Deposits of Mars
42nd Lunar and Planetary Science Conference (2011) 2552.pdf MODELING SHARAD ECHOES FROM HIRISE-DERIVED STRATIGRAPHY OF THE NORTHERN POLAR LAYERED DEPOSITS OF MARS. D. C. Nunes1, S. Christian2, J. W. Holt2, S. E. Smrekar1, and R. J. Phillips3, 1Jet Propulsion Laboratory, California Institute of Technology, Pasadena CA 91109 ([email protected]), 2Jackson School of Geosciences, University of Texas, Austin TX 78758, 3Southwest Research Institute, Boulder CO 80302 Introduction: Since the early days of Mariner 9, of uncertainty in the permittivity profiles so obtained is the Martian polar layered deposits (PLD) were sus- our ignorance of the permittivity of the silicate compo- pected to be large volatile repositories [1]. Alternating nent of the mixture. For example, bulk permittivity of bright and dark layers exposed at the walls of spiral basalts varies between 4.9 and 9.8 [14]. In contrast, the troughs incising the PLD, and also at their at marginal permittivity of water ice for martian temperatures and scarps, suggested variations in the proportion of sili- SHARAD frequencies resides at ~ 3.10 ± 0.05 [13]. cate impurities in the ice resulting from oscillations in Finally, the propagation of the SHARAD chirp (20 the depositional regime [1,2,3,4]. Variations in insola- MHz center frequency, 10 MHz bandwidth, and 85 µs tion arising from obliquity and orbital eccentricity cy- width) through the permittivity profiles in NP06 fol- cles was an early and continues to be the most ac- lowed the model of [15] for normal incidence of plane cepted model for driving the variations in depositional waves onto layered media. -
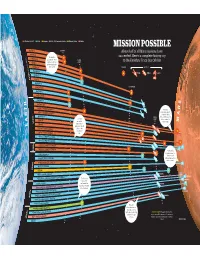
MISSION POSSIBLE KORABL 4 LAUNCH About Half of All Mars Missions Have
Russia/U.S.S.R. U.S. Japan U.K./ESA member states Russia/China India MISSION POSSIBLE KORABL 4 LAUNCH About half of all Mars missions have KORABL 5 ) The frst U.S. succeeded. Here’s a complete history, up s KORAB e L 11 to Mars t spacecraft EARTH a to the ExoMars Trace Gas Orbiter d mysteriously lost ORBIT MARS 1 h power eight hours c n KORA after launch u BL 13 FAILURE SUCCESS a L ( MARINER 3 s Flyby Orbiter Lander 0 MA 6 RINER 4 9 1 ZOND 2 MARINER 6 IN TRANSIT MARS 1969A MARINER 7 MARS 1969B MARINER 8 S H KOSMOS 419 MA R T RS 2 ORBITER/LANDER The frst man-made object MARS 3 ORBITER/LAN DER A R to land on Mars. s MARINER 9 MARS But contact was lost 0 The frst 7 ORBIT 20 seconds after A MARS 9 4 successful touchdown M 1 Mars surface MARS 5 E exploration found all elements MARS 6 FLYBY/LAND ER essential to MARS 7 FLYBY/LANDER life VIKING 1 ORBITER/LANDER VIKING 2 ORBITER/LANDER s 0 PHOBOS 1 ORBITER/LANDER 8 9 PHOBOS 2 ORBITER/LANDER 1 Pathfinder’s Sojourner was the MARS OBSERVER frst wheeled MARS GLOBAL SURVEYOR vehicle deployed on another planet s MARS 96 ORBITER/LANDER 0 9 MARS PATHFINDER 9 1 NOZOMI MARS CLIMATE ORBITER ONGOING ONGOING 2 PROBES/MARS POLAR LANDER The Phoenix ONGOING DEEP SPACE ONGOING lander frst MARS ODYSSEY confrmed the ONGOING presence of water /BEAGLE 2 LANDER MARS EXPRESS ORBITER in soil samples s RIT MARS EXPLORATION ROVER–SPI ONGOING 0 0 OVER–OPPORTUNITY 0 MARS EXPLORATION R ONGOING 2 ITER MARS RECONNAISSANCE ORB ENIX MARS LANDER PHO Curiosity descended on the -GRUNT/YINGHUO-1 PHOBOS frst “sky crane,” a s B/CURIOSITY highly precise landing DID YOU KNOW? The early missions had 0 MARS SCIENCE LA 1 system for large up to seven diferent names. -

Scientific Exploration of Mars
Chapter 5 Scientific Exploration of Mars UNDERSTANDING MARS successfully inserted Mariner 9 into an orbit about Mars8 on November 13, 1971. It was the The planets have fascinated humankind ever first spacecraft to orbit another planet (box 5-A). since observers first recognized that they had For the first 2 months of the spacecraft’s stay in characteristic motions different from the stars. Mars’ orbit, the most severe Martian dust storms Astronomers in the ancient Mediterranean called ever recorded obscured Mars surface features. them the wanderers because they appear to wan- After the storms subsided and the atmosphere der among the background of the stars. Because cleared up, Mariner 9 was able to map the entire of its reddish color as seen by the naked eye, Mars Martian surface with a surface resolution of 1 9 drew attention. It has been the subject of scientif- kilometer. ic and fictiona13 interest for centuries.4 In recent Images from Mariner 9 revealed surface fea- years, planetary scientists have developed in- tures far beyond what investigators had expected creased interest in Mars, because Mars is the from the earlier flybys. The earlier spacecraft had most Earthlike of the planets. “The study of Mars by chance photographed the heavily cratered is [therefore] an essential basis for our under- southern hemisphere of the planet, which looks standing of the evolution of the Earth and the more like the Moon than like Earth. These first inner solar system.”5 closeup images of Mars gave scientists the false Planetary exploration has been one of the Na- impression that Mars was a geologically “dead” tional Aeronautics and Space Administration’s planet, in which asteroid impacts provided the (NASA) primary goals ever since the U.S.