Deep Space 2: the Mars Microprobe Project and Beyond
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Aerothermodynamic Design of the Mars Science Laboratory Heatshield
Aerothermodynamic Design of the Mars Science Laboratory Heatshield Karl T. Edquist∗ and Artem A. Dyakonovy NASA Langley Research Center, Hampton, Virginia, 23681 Michael J. Wrightz and Chun Y. Tangx NASA Ames Research Center, Moffett Field, California, 94035 Aerothermodynamic design environments are presented for the Mars Science Labora- tory entry capsule heatshield. The design conditions are based on Navier-Stokes flowfield simulations on shallow (maximum total heat load) and steep (maximum heat flux, shear stress, and pressure) entry trajectories from a 2009 launch. Boundary layer transition is expected prior to peak heat flux, a first for Mars entry, and the heatshield environments were defined for a fully-turbulent heat pulse. The effects of distributed surface roughness on turbulent heat flux and shear stress peaks are included using empirical correlations. Additional biases and uncertainties are based on computational model comparisons with experimental data and sensitivity studies. The peak design conditions are 197 W=cm2 for heat flux, 471 P a for shear stress, 0.371 Earth atm for pressure, and 5477 J=cm2 for total heat load. Time-varying conditions at fixed heatshield locations were generated for thermal protection system analysis and flight instrumentation development. Finally, the aerother- modynamic effects of delaying launch until 2011 are previewed. Nomenclature 1 2 2 A reference area, 4 πD (m ) CD drag coefficient, D=q1A D aeroshell diameter (m) 2 Dim multi-component diffusion coefficient (m =s) ci species mass fraction H total enthalpy -

Aerocapture FS-Pdf.Indd
NASA Facts National Aeronautics and Space Administration Marshall Space Flight Center Huntsville, Alabama 35812 FS-2004-09-127-MSFC July 2004 Aerocapture Technology NASA technologists are working to develop ways to place robotic space vehicles into long-duration, scientific orbits around distant Solar System destinations without the need for the heavy, on-board fuel loads that have historically inhibited vehicle performance, mission dura- tion and available mass for science payloads. Aerocapture -- a flight maneuver that inserts a space- craft into its proper orbit once it arrives at a planet -- is part of a unique family of “aeroassist” technologies under consideration to achieve these goals and enable robust science missions to any planetary body with an appreciable atmosphere. Aerocapture technology is just one of many propulsion technologies being developed by NASA technologists and their partners in industry and academia, led by NASA’s In-Space Propulsion Technology Office at the Marshall Space Flight Center in Huntsville, Ala. The Center implements the In-Space Propulsion Technolo- gies Program on behalf of NASA’s Science Mission Directorate in Washington. Aerocapture uses a planet’s or moon’s atmosphere to accomplish a quick, near-propellantless orbit capture to place a space vehicle in its proper orbit. The atmo- sphere is used as a brake to slow down a spacecraft, transferring the energy associated with the vehicle’s high speed into thermal energy. Aerocapture entering Mars Orbit. The aerocapture maneuver starts with an approach trajectory into the atmosphere of the target body. The dense atmosphere creates friction, slowing the craft and placing it into an elliptical orbit -- an oval shaped orbit. -

Magnetoshell Aerocapture: Advances Toward Concept Feasibility
Magnetoshell Aerocapture: Advances Toward Concept Feasibility Charles L. Kelly A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Aeronautics & Astronautics University of Washington 2018 Committee: Uri Shumlak, Chair Justin Little Program Authorized to Offer Degree: Aeronautics & Astronautics c Copyright 2018 Charles L. Kelly University of Washington Abstract Magnetoshell Aerocapture: Advances Toward Concept Feasibility Charles L. Kelly Chair of the Supervisory Committee: Professor Uri Shumlak Aeronautics & Astronautics Magnetoshell Aerocapture (MAC) is a novel technology that proposes to use drag on a dipole plasma in planetary atmospheres as an orbit insertion technique. It aims to augment the benefits of traditional aerocapture by trapping particles over a much larger area than physical structures can reach. This enables aerocapture at higher altitudes, greatly reducing the heat load and dynamic pressure on spacecraft surfaces. The technology is in its early stages of development, and has yet to demonstrate feasibility in an orbit-representative envi- ronment. The lack of a proof-of-concept stems mainly from the unavailability of large-scale, high-velocity test facilities that can accurately simulate the aerocapture environment. In this thesis, several avenues are identified that can bring MAC closer to a successful demonstration of concept feasibility. A custom orbit code that dynamically couples magnetoshell physics with trajectory prop- agation is developed and benchmarked. The code is used to simulate MAC maneuvers for a 60 ton payload at Mars and a 1 ton payload at Neptune, both proposed NASA mis- sions that are not possible with modern flight-ready technology. In both simulations, MAC successfully completes the maneuver and is shown to produce low dynamic pressures and continuously-variable drag characteristics. -

Report on the Loss of the Mars Polar Lander and Deep Space 2 Missions
Report on the Loss of the Mars Polar Lander and Deep Space 2 Missions JPL Special Review Board 22 March 2000 JPL D-18709 REPORT ON THE LOSS OF MARS POLAR LANDER / DEEP SPACE 2 JPL SPECIAL REVIEW BOARD — SIGNATURE PAGE — Mars Polar Lander/Deep Space 2 Loss — JPL Special Review Board Report JPL D-18709 — page iii CONTENTS List of Tables........................................................................................................................................ vii List of Figures ...................................................................................................................................... vii Acronyms and Abbreviations.............................................................................................................. viii EXECUTIVE SUMMARY................................................................................................... xi 1INTRODUCTION .......................................................................................................................... 1 1.1 Mars Surveyor Program ......................................................................................................................... 1 1.2 Loss of the Mars Climate Orbiter Mission ........................................................................................... 1 1.2.1 Investigation of the MCO Loss .................................................................................................................. 1 1.2.2 Post-MCO Corrective Actions for Mars Polar Lander ........................................................................... -

Mars Program Independent Assessment Team Summary Report
Mars Program Independent Assessment Team Summary Report March 14, 2000 Mars Climate Orbiter failed to achieve Mars orbit on September 23, 1999. On December 3, 1999, Mars Polar Lander and two Deep Space 2 microprobes failed. As a result, the NASA Administrator established the Mars Program Independent Assessment Team (MPIAT) with the following charter: Review and Analyze Successes and Failures of Recent Mars and Deep Space Missions − Mars Global Surveyor – Mars Climate Orbiter − Pathfinder – Mars Polar Lander − Deep Space 1 – Deep Space 2 Examine the Relationship Between and Among − NASA Jet Propulsion Laboratory (JPL) − California Institute of Technology (Caltech) − NASA Headquarters − Industry Partners Assess Effectiveness of Involvement of Scientists Identify Lessons Learned From Successes and Failures Review Revised Mars Surveyor Program to Assure Lessons Learned Are Utilized Oversee Mars Polar Lander and Deep Space 2 Failure Reviews Complete by March 15, 2000 In-depth reviews were conducted at NASA Headquarters, JPL, and Lockheed Martin Astronautics (LMA). Structured reviews, informal sessions with numerous Mars Program participants, and extensive debate and discussion within the MPIAT establish the basis for this report. The review process began on January 7, 2000, and concluded with a briefing to the NASA Administrator on March 14, 2000. This report represents the integrated views of the members of the MPIAT who are identified in the appendix. In total, three related reports have been produced: this report, a more detailed report titled “Mars Program Independent Assessment Team Report” (dated March 14, 2000), and the “Report on the Loss of the Mars Polar Lander and Deep Space 2 Missions” (dated March 22, 2000). -

Co-Optimization of Mid Lift to Drag Vehicle Concepts for Mars Atmospheric Entry
10th AIAA/ASME Joint Thermophysics and Heat Transfer Conference AIAA 2010-5052 28 June - 1 July 2010, Chicago, Illinois Co-Optimization of Mid Lift to Drag Vehicle Concepts for Mars Atmospheric Entry Joseph A. Garcia1 , James L. Brown2 , David J. Kinney1 and Jeffrey V. Bowles1 NASA Ames Research Center, Moffett Field, CA 94035, USA and Loc C. Huynh3. Xun J. Jiang3, Eric Lau3, and Ian C. Dupzyk4 ELORET Corporation, Moffett Field, CA 94035, USA As NASA continues to make plans for future robotic precursor and eventual human missions to Mars, the need to characterize and develop designs for entry vehicles capable of delivering large masses to the surface of Mars will persist. In combination with this, NASA has recognized that the current heritage technology for Mars’ Entry Decent and Landing (EDL) does not have the capability to land the required payload masses. Both the Thermal Protection System (TPS) and the Descent/Landing systems require new design approaches. Because of these needs, NASA has performed an Entry, Descent and Landing Systems Analysis (EDL-SA) study for high mass exploration and science missions to identify key enabling technology areas for further investment. One key technology area identified includes rigid aeroshell shapes for aerodynamic performance and controllability. In this investigation, a system optimization study of alternative aeroshell shapes for Mars exploration class payloads of approximately 40 metric tons has been conducted. This system optimization is accomplished using a Multi-disciplinary Design Optimization (MDO) framework which accounts for the aeroshell shape, trajectory, thermal protection system, and vehicle subsystem closure along with a Multi Objective Genetic Algorithm (MOGA) for the initial shape exploration. -

Mars Exploration Entry, Descent and Landing Challenges1,2
Mars Exploration Entry, Descent and Landing Challenges1,2 Robert D. Braun Robert M. Manning Georgia Institute of Technology Jet Propulsion Laboratory Atlanta, GA 30332-0150 California Institute of Technology (404) 385-6171 Pasadena, CA 91109 [email protected] (818) 393-7815 [email protected] Abstract—The United States has successfully landed five interesting locations within close proximity (10’s of m) of robotic systems on the surface of Mars. These systems all pre-positioned robotic assets. These plans require a had landed mass below 0.6 metric tons (t), had landed simultaneous two order of magnitude increase in landed footprints on the order of hundreds of km and landed at sites mass capability, four order of magnitude increase in landed below -1 km MOLA elevation due the need to perform accuracy, and an entry, descent and landing operations entry, descent and landing operations in an environment sequence that may need to be completed in a lower density with sufficient atmospheric density. Current plans for (higher surface elevation) environment. This is a tall order human exploration of Mars call for the landing of 40-80 t that will require the space qualification of new EDL surface elements at scientifically interesting locations within approaches and technologies. close proximity (10’s of m) of pre-positioned robotic assets. This paper summarizes past successful entry, descent and Today, robotic exploration systems engineers are struggling landing systems and approaches being developed by the with the challenges of increasing landed mass capability to 1 robotic Mars exploration program to increased landed t while improving landed accuracy to 10’s of km and performance (mass, accuracy and surface elevation). -
Dreaming of Mars Sample Return
National Aeronautics and Space Administration Dreaming of Mars Sample Return Jet Propulsion Laboratory California Institute of Technology Pasadena, California Erik M. Conway October 2012 Solar System @ 50 2 – 11/13/2012 3 – 11/13/2012 4 – 11/13/2012 5 – 11/13/2012 Threads of this Story • Design and Engineering in support of science • Competition for funds within NASA • NASA’s dual self-image as – A scientific agency – The enabler of human expansion into the solar system 6 – 11/13/2012 Act I: Scientists and Sample Return, 1977-1989 7 – 11/13/2012 Act II: Sample Return in the Faster, Better, Cheaper Era 8 – 11/13/2012 9 – 11/13/2012 10 – 11/13/2012 11 – 11/13/2012 12 – 11/13/2012 13 – 11/13/2012 LANDED CONFIGURATION HGA MAV/MAV INSULATION UHF ANTENNA SSI LGA 2 REC & 2 TRANS SSOHOWN ROVER Y SOLAR ARRAY Z 2 PLCS X DRILL ENVELOPE INSTRUMENT DECK UPPER SURFACE RAMPS Report on the Loss of the Mars Polar Lander and Deep Space 2 Missions JPL Special Review Board 22 March 2000 JPL D-18709 15 – 11/13/2012 Ac t III The Bubble Team and Large Lander Studies 16 – 11/13/2012 Evolution from MSR Large Lander to Mars Smart Lander (circa early 2000) Mars Science Laboratory Mars 98 & MSR Mars Smart Lander Mars Expl. Rover Mars Science Lab. •EDL architecture given one last “fresh” look, focused on: •The failure of the M98 •Extensive evaluation of •MSL mission was delayed Cost Reduction lander mission during MSR’s many different EDL and to 2007 and then 2009, Performance Increase phase A, led to a change in Landing architectures resulting in more time to risk posture on landing suitable for MSR were develop technologies. -

Mars Exploration Camp Is to Excite Young Minds and Inspire Student Trainees Toward Future Science, Technology, Engineering, and Mathematics (STEM) Pursuits
National Aeronautics and Space Administration Summer of Innovation Mars Exploration 4th – 9th grade www.nasa.gov Introduction The goal of the NASA Summer of Innovation Mars Exploration camp is to excite young minds and inspire student trainees toward future science, technology, engineering, and mathematics (STEM) pursuits. Raising trainee achievement in STEM pursuits begins by leading trainees on a journey of understanding through these highly engaging activities. The activities and experiences in this guide come from across NASAʼs vast collection of educational materials. This themed camp outline provides examples of one-day, two-day, and weeklong science and engineering programs. Each day contains 6-8 hours of activities totaling more than 35 hours of instructional time. The camp template will assist you in developing an appropriate learning progression focusing on the concepts necessary to engage in learning about Mars. The Mars Exploration camp provides an interactive set of learning experiences that center on the past, present, and future exploration of Mars. The activities scaffold to include cooperative learning, problem solving, critical thinking, and hands-on experiences. As each activity progresses, the conceptual challenges increase, offering trainees full immersion in the topics. Intended Learning Experiences Through the participation in these camps future scientists and engineers will have the opportunity to explore Mars. Student trainees gain learning experiences that help make scientific careers something they can envision -

Mars Microprobe Entry Analysis
Mars Microprob e Entry Analysis y Rob ert D. Braun Rob ert A. Mitcheltree F. McNeil Cheatwo o d NASA Langley Research Center NASA Langley Research Center Vigyan Inc. Hampton, VA 23681-0001 Hampton, VA 23681-0001 Hampton, VA 23666-1325 (757) 864-4507 (757) 864-4382 (757) 864-2984 [email protected] [email protected] f.m.cheatwo o [email protected] Abstract{The Mars Microprob e mission will 1 Introduction provide the rst opp ortunity for subsurface The ob jective of NASA's New Millennium pro- measurements, including water detection, near gram is to demonstrate and ight qualify tech- the south p ole of Mars. In this pap er, p er- nology elements required for the science mis- formance of the Microprob e aeroshell design is sions of the next century [1 ]. The program's evaluated through development of a six-degree- second ight pro ject, Deep Space Two (DS{ of-freedom (6-DOF) aero dynamic database and 2) is fo cused on the design of two small Mars ight dynamics simulation. Numerous mission entry prob es. As a result, DS{2 is often re- uncertainties are quanti ed and a Monte-Carlo ferred to as the Mars Microprob e mission. This analysis is p erformed to statistically assess mis- pro of-of-concept system is intended to demon- sion p erformance. Results from this 6-DOF strate key elements of future network science Monte-Carlo simulation demonstrate that, in a missions [2 , 3]. Attached to the cruise stage ma jority of the cases (approximately 2{ ), the of the Mars 98 Surveyor Lander, these two p enetrator impact conditions are within current Microprob e vehicles will b e launched to Mars design tolerances. -
L02: Case Studies: the Mars Program
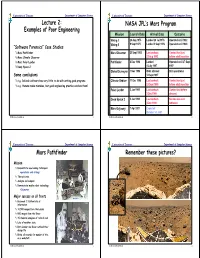
University of Toronto Department of Computer Science University of Toronto Department of Computer Science Lecture 2: NASA JPL’s Mars Program Examples of Poor Engineering Mission Launch Date Arrival Date Outcome Viking I 20 Aug 1975 Landed 20 Jul 1976 Operated until 1982 Viking II 9 Sept 1975 Landed 3 Sept 1976 Operated until 1980 ➜ “Software Forensics” Case Studies: Mars Pathfinder Mars Observer 25 Sept 1992 Last contact: Contact lost just Mars Climate Observer 22 Aug 1993 before orbit insertion Mars Polar Lander Pathfinder 4 Dec 1996 Landed Operated until 27 Sept Deep Space 2 4 July 1997 1997 Global Surveyor 7 Nov 1996 Orbit attained Still operational ➜ Some conclusions 12 Sept 1997 e.g. Reliable software has very little to do with writing good programs Climate Orbiter 11 Dec 1998 Last contact: Contact lost just 23 Sept 1999 before orbit insertion e.g. Humans make mistakes, but good engineering practice catches them! Polar Lander 3 Jan 1999 Last contact: Contact lost before 3 Dec 1999 descent Deep Space 2 3 Jan 1999 Last contact: No data was ever 3 Dec 1999 retrieved Mars Odyssey 7 Apr 2001 Expected: October 24, 2001 © 2001, Steve Easterbrook 1 © 2001, Steve Easterbrook 2 University of Toronto Department of Computer Science University of Toronto Department of Computer Science Mars Pathfinder Remember these pictures? ➜ Mission Demonstrate new landing techniques parachute and airbags Take pictures Analyze soil samples Demonstrate mobile robot technology Sojourner ➜ Major success on all fronts Returned 2.3 billion bits of information -

Mars Polar Lander JPL Report Part 5 (Pdf)
8 SUMMARY OF POTENTIAL DS2 FAILURE MODES This section provides a summary description of the DS2 potential failure modes considered by the Board. It also provides a high-level assessment of the plausibility of each of the failure modes based on the Board’s review of the relevant design, implementation, and test history, and what may be inferred from data obtained throughout the mission operations. References are made to Sections 9, which contains detailed descriptions of the failure modes summarized in this section, along with findings and Lessons Learned. Failure modes are divided into two groups: ! Failure Modes Affecting Both Probes ! Failure Modes Affecting a Single Probe The four DS2 potential failure modes identified by the Board as plausible are highlighted as FLAG 1, FLAG 2, FLAG 3, and FLAG 4. Figure 8-1 illustrates the DS2 entry, descent, and impact (EDI) sequence and shows potential failure modes. Mars Polar Lander/Deep Space 2 Loss — JPL Special Review Board Report JPL D-18709 — page 124 • Probes experience battery drain prior to entry, descent, and impact sequence • Probes separate prematurely • Probes fail to separate from cruise stage (flaw in separation system) • Aeroshells fail (design flaw) • MPL fails to separate from cruise stage • MPL overheating, skip-out, excessive down-track entry points • Probes skip out or land too far down track; can’t • Random part failure communicate with MGS • Undetected aeroshell handling damage • Probes bounce on impact • Probes encounter surface conditions that exceed design capabilities • Structural failure on impact • Electronic or battery failure on impact • Ionization breakdown in Mars atmosphere • DS2 UHF link fails • Probes land on their sides, interfering with antenna performance Figure 8-1.