Magnetoshell Aerocapture: Advances Toward Concept Feasibility
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Call for M5 Missions
ESA UNCLASSIFIED - For Official Use M5 Call - Technical Annex Prepared by SCI-F Reference ESA-SCI-F-ESTEC-TN-2016-002 Issue 1 Revision 0 Date of Issue 25/04/2016 Status Issued Document Type Distribution ESA UNCLASSIFIED - For Official Use Table of contents: 1 Introduction .......................................................................................................................... 3 1.1 Scope of document ................................................................................................................................................................ 3 1.2 Reference documents .......................................................................................................................................................... 3 1.3 List of acronyms ..................................................................................................................................................................... 3 2 General Guidelines ................................................................................................................ 6 3 Analysis of some potential mission profiles ........................................................................... 7 3.1 Introduction ............................................................................................................................................................................. 7 3.2 Current European launchers ........................................................................................................................................... -

Launch and Deployment Analysis for a Small, MEO, Technology Demonstration Satellite
46th AIAA Aerospace Sciences Meeting and Exhibit AIAA 2008-1131 7 – 10 January 20006, Reno, Nevada Launch and Deployment Analysis for a Small, MEO, Technology Demonstration Satellite Stephen A. Whitmore* and Tyson K. Smith† Utah State University, Logan, UT, 84322-4130 A trade study investigating the economics, mass budget, and concept of operations for delivery of a small technology-demonstration satellite to a medium-altitude earth orbit is presented. The mission requires payload deployment at a 19,000 km orbit altitude and an inclination of 55o. Because the payload is a technology demonstrator and not part of an operational mission, launch and deployment costs are a paramount consideration. The payload includes classified technologies; consequently a USA licensed launch system is mandated. A preliminary trade analysis is performed where all available options for FAA-licensed US launch systems are considered. The preliminary trade study selects the Orbital Sciences Minotaur V launch vehicle, derived from the decommissioned Peacekeeper missile system, as the most favorable option for payload delivery. To meet mission objectives the Minotaur V configuration is modified, replacing the baseline 5th stage ATK-37FM motor with the significantly smaller ATK Star 27. The proposed design change enables payload delivery to the required orbit without using a 6th stage kick motor. End-to-end mass budgets are calculated, and a concept of operations is presented. Monte-Carlo simulations are used to characterize the expected accuracy of the final orbit. -

The "Bug" Heard 'Round the World
ACM SIGSOFT SOFTWAREENGINEERING NOTES, Vol 6 No 5, October 1981 Page 3 THE "BUG" HEARD 'ROUND THE WORLD Discussion of the software problem which delayed the first Shuttle orbital flight JohnR. Garman Cn April 10, 1981, about 20 minutes prior to the scheduled launching of the first flight of America's Space Transportation System, astronauts and technicians attempted to initialize the software system which "backs-up" the quad-redundant primary software system ...... and could not. In fact, there was no possible way, it turns out, that the BFS (Backup Flight Control System) in the fifth onboard computer could have been initialized , Froperly with the PASS (Primary Avionics Software System) already executing in the other four computers. There was a "bug" - a very small, very improbable, very intricate, and very old mistake in the initialization logic of the PASS. It was the type of mistake that gives programmers and managers alike nightmares - and %heoreticians and analysts endless challenge. I% was the kind of mistake that "cannot happen" if one "follows all the rules" of good software design and implementation. It was the kind of mistake that can never be ruled out in the world of real systems development: a world involving hundreds of programmers and analysts, thousands of hours of testing and simulation, and millions of pages of design specifications, implementation schedules, and test plans and reports. Because in that world, software is in fact "soft" - in a large complex real time control system like the Shuttle's avionics system, software is pervasive and, in virtually every case, the last subsystem to stabilize. -

Breakthrough Propulsion Study Assessing Interstellar Flight Challenges and Prospects
Breakthrough Propulsion Study Assessing Interstellar Flight Challenges and Prospects NASA Grant No. NNX17AE81G First Year Report Prepared by: Marc G. Millis, Jeff Greason, Rhonda Stevenson Tau Zero Foundation Business Office: 1053 East Third Avenue Broomfield, CO 80020 Prepared for: NASA Headquarters, Space Technology Mission Directorate (STMD) and NASA Innovative Advanced Concepts (NIAC) Washington, DC 20546 June 2018 Millis 2018 Grant NNX17AE81G_for_CR.docx pg 1 of 69 ABSTRACT Progress toward developing an evaluation process for interstellar propulsion and power options is described. The goal is to contrast the challenges, mission choices, and emerging prospects for propulsion and power, to identify which prospects might be more advantageous and under what circumstances, and to identify which technology details might have greater impacts. Unlike prior studies, the infrastructure expenses and prospects for breakthrough advances are included. This first year's focus is on determining the key questions to enable the analysis. Accordingly, a work breakdown structure to organize the information and associated list of variables is offered. A flow diagram of the basic analysis is presented, as well as more detailed methods to convert the performance measures of disparate propulsion methods into common measures of energy, mass, time, and power. Other methods for equitable comparisons include evaluating the prospects under the same assumptions of payload, mission trajectory, and available energy. Missions are divided into three eras of readiness (precursors, era of infrastructure, and era of breakthroughs) as a first step before proceeding to include comparisons of technology advancement rates. Final evaluation "figures of merit" are offered. Preliminary lists of mission architectures and propulsion prospects are provided. -

Design of the Trajectory of a Tether Mission to Saturn
DOI: 10.13009/EUCASS2019-510 8TH EUROPEAN CONFERENCE FOR AERONAUTICS AND AEROSPACE SCIENCES (EUCASS) DOI: Design of the trajectory of a tether mission to Saturn ⋆ Riccardo Calaon , Elena Fantino§, Roberto Flores ‡ and Jesús Peláez† ⋆Dept. of Industrial Engineering, University of Padova Via Gradenigio G/a -35131- Padova, Italy §Dept. of Aerospace Engineering, Khalifa University Abu Dhabi, Unites Arab Emirates ‡Inter. Center for Numerical Methods in Engineering Campus Norte UPC, Gran Capitán s/n, Barcelona, Spain †Space Dynamics Group, UPM School of Aeronautical and Space Engineering, Pz. Cardenal Cisneros 3, Madrid, Spain [email protected], [email protected], rfl[email protected], [email protected] †Corresponding author Abstract This paper faces the design of the trajectory of a tether mission to Saturn. To reduce the hyperbolic excess velocity at arrival to the planet, a gravity assist at Jupiter is included. The Earth-to-Jupiter portion of the transfer is unpropelled. The Jupiter-to-Saturn trajectory has two parts: a first coasting arc followed by a second arc where a low thrust engine is switched on. An optimization process provides the law of thrust control that minimizes the velocity relative to Saturn at arrival, thus facilitating the tethered orbit insertion. 1. Introduction The outer planets are of particular interest in terms of what they can reveal about the origin and evolution of our solar system. They are also local analogues for the many extra-solar planets that have been detected over the past twenty years. The study of these planets furthers our comprehension of our neighbourhood and provides the foundations to understand distant planetary systems. -

Theory of Space Magnetic Sail Some Common Mistakes and Electrostatic Magsail
1 Article MagSail after Cath for J 10 1 6 06 AIAA -2006 -8148 Theory of Space Magnetic Sail Some Common Mistakes and Electrostatic MagSail * Alexander Bolonkin C&R, 1310 Avenue R, #F -6, Brooklyn, NY 11229, USA T/F 718 -339 -4563, [email protected], http://Bolonki n.narod.ru Abstract The first reports on the “Space Magnetic Sail” concept appeared more 30 years ago. During the period since some hundreds of research and scientific works have been published, including hundreds of research report by professors at major famous universities. The author herein shows that all these works related to Space Magnetic Sail concept are technically incorrect because their authors did not take into consideration that solar wind impinging a MagSail magnetic field creates a particle m agnetic field opposed to the MagSail field. In the incorrect works, the particle magnetic field is hundreds times stronger than a MagSail magnetic field. That means all the laborious and costly computations in revealed in such technology discussions are us eless: the impractical findings on sail thrust (drag), time of flight within the Solar System and speed of interstellar trips are essentially worthless working data! The author reveals the correct equations for any estimated performance of a Magnetic Sail as well as a new type of Magnetic Sail (without a matter ring). Key words: magnetic sail, theory of MagSail, space magnetic sail, Electrostatic MagSail *Presented to 14th AIAA/AHI Space Planes and Hypersonic Systems and Technologies Conference , 6 - 9 Nov 2006 National Convention Centre, Canberra, Australia. Introduction The idea of utilizing the magnetic field to aggregate matter in space, harnessing a drag from solar wind or receiving a thrust from an Earth - charged particle beam is old. -

An Assessment of Aerocapture and Applications to Future Missions
Post-Exit Atmospheric Flight Cruise Approach An Assessment of Aerocapture and Applications to Future Missions February 13, 2016 National Aeronautics and Space Administration An Assessment of Aerocapture Jet Propulsion Laboratory California Institute of Technology Pasadena, California and Applications to Future Missions Jet Propulsion Laboratory, California Institute of Technology for Planetary Science Division Science Mission Directorate NASA Work Performed under the Planetary Science Program Support Task ©2016. All rights reserved. D-97058 February 13, 2016 Authors Thomas R. Spilker, Independent Consultant Mark Hofstadter Chester S. Borden, JPL/Caltech Jessie M. Kawata Mark Adler, JPL/Caltech Damon Landau Michelle M. Munk, LaRC Daniel T. Lyons Richard W. Powell, LaRC Kim R. Reh Robert D. Braun, GIT Randii R. Wessen Patricia M. Beauchamp, JPL/Caltech NASA Ames Research Center James A. Cutts, JPL/Caltech Parul Agrawal Paul F. Wercinski, ARC Helen H. Hwang and the A-Team Paul F. Wercinski NASA Langley Research Center F. McNeil Cheatwood A-Team Study Participants Jeffrey A. Herath Jet Propulsion Laboratory, Caltech Michelle M. Munk Mark Adler Richard W. Powell Nitin Arora Johnson Space Center Patricia M. Beauchamp Ronald R. Sostaric Chester S. Borden Independent Consultant James A. Cutts Thomas R. Spilker Gregory L. Davis Georgia Institute of Technology John O. Elliott Prof. Robert D. Braun – External Reviewer Jefferey L. Hall Engineering and Science Directorate JPL D-97058 Foreword Aerocapture has been proposed for several missions over the last couple of decades, and the technologies have matured over time. This study was initiated because the NASA Planetary Science Division (PSD) had not revisited Aerocapture technologies for about a decade and with the upcoming study to send a mission to Uranus/Neptune initiated by the PSD we needed to determine the status of the technologies and assess their readiness for such a mission. -
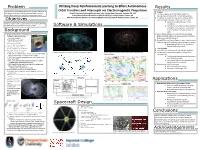
Utilizing Deep Reinforcement Learning to Effect Autonomous Orbit Transfers and Intercepts Via Electromagnetic Propulsion
Problem Utilizing Deep Reinforcement Learning to Effect Autonomous Results The growth in space-capable entities has caused a rapid rise in Orbit Transfers and Intercepts via Electromagnetic Propulsion ➢ Analysis the number of derelict satellites and space debris in orbit Gabriel Sutherland ([email protected]), Oregon State University, Corvallis, OR, USA ❖ The data suggests spacecraft highly capable of around Earth, which pose a significant navigation hazard. Frank Soboczenski ([email protected]), King’s College London, London, UK neutralizing/capturing small to intermediate debris Athanasios Vlontzos ([email protected]), Imperial College London, London, UK ❖ In simulations, spacecraft was able to capture and/or Objectives neutralize debris ranging in mass from 1g to 100g ❖ Satellites suffered damage in some Develop a system that is capable of autonomously neutralizing simulations multiple pieces of space debris in various orbits. Software & Simulations ❖ Simulations show that damaged segments of satellite were vaporized, which means Background that no additional debris was added to orbit ➢ Dangerous amounts of space debris in orbit, estimates vary ❖ Neural Network based on Deep Deterministic Policy ➢20,000+ tracked objects larger Gradient (DDPG) effective at low-thrust orbit transfers in than 10 cm diameter 2D Hohmann transfer problem ➢Est 500,000 objects larger ❖ Using ASTOS simulation software, mission-representative than 1 cm in diameter model of spacecraft and experimental propulsion system ➢Est 100 million objects ❖ Interfaced with DRL to train the Neural smaller than 1cm in diameter ➢ Orbital speeds of these objects Network with realistic data vary from 100+ kph to 28,100 kph ➢ Future Studies ➢ Spacecraft collisions due to space ❖ Train DDPG for 3 dimensional orbit transfer problems debris have been sparse so far Tracked spacecraft in Earth orbit. -

Deep Space 2: the Mars Microprobe Project and Beyond
First International Conference on Mars Polar Science 3039.pdf DEEP SPACE 2: THE MARS MICROPROBE PROJECT AND BEYOND. S. E. Smrekar and S. A. Gavit, Mail Stop 183-501, Jet Propulsion Laboratory, California Institute of Technology, 4800 Oak Grove Drive, Pasa- dena CA 91109, USA ([email protected]). Mission Overview: The Mars Microprobe Proj- System Design, Technologies, and Instruments: ect, or Deep Space 2 (DS2), is the second of the New Telecommunications. The DS2 telecom system, Millennium Program planetary missions and is de- which is mounted on the aftbody electronics plate, signed to enable future space science network mis- relays data back to earth via the Mars Global Surveyor sions through flight validation of new technologies. A spacecraft which passes overhead approximately once secondary goal is the collection of meaningful science every 2 hours. The receiver and transmitter operate in data. Two micropenetrators will be deployed to carry the Ultraviolet Frequency Range (UHF) and data is out surface and subsurface science. returned at a rate of 7 Kbits/second. The penetrators are being carried as a piggyback Ultra-low-temperature lithium primary battery. payload on the Mars Polar Lander cruise ring and will One challenging aspect of the microprobe design is be launched in January of 1999. The Microprobe has the thermal environment. The batteries are likely to no active control, attitude determination, or propulsive stay no warmer than -78° C. A lithium-thionyl pri- systems. It is a single stage from separation until mary battery was developed to survive the extreme landing and will passively orient itself due to its aero- temperature, with a 6 to 14 V range and a 3-year shelf dynamic design (Fig. -

Aerothermodynamic Design of the Mars Science Laboratory Heatshield
Aerothermodynamic Design of the Mars Science Laboratory Heatshield Karl T. Edquist∗ and Artem A. Dyakonovy NASA Langley Research Center, Hampton, Virginia, 23681 Michael J. Wrightz and Chun Y. Tangx NASA Ames Research Center, Moffett Field, California, 94035 Aerothermodynamic design environments are presented for the Mars Science Labora- tory entry capsule heatshield. The design conditions are based on Navier-Stokes flowfield simulations on shallow (maximum total heat load) and steep (maximum heat flux, shear stress, and pressure) entry trajectories from a 2009 launch. Boundary layer transition is expected prior to peak heat flux, a first for Mars entry, and the heatshield environments were defined for a fully-turbulent heat pulse. The effects of distributed surface roughness on turbulent heat flux and shear stress peaks are included using empirical correlations. Additional biases and uncertainties are based on computational model comparisons with experimental data and sensitivity studies. The peak design conditions are 197 W=cm2 for heat flux, 471 P a for shear stress, 0.371 Earth atm for pressure, and 5477 J=cm2 for total heat load. Time-varying conditions at fixed heatshield locations were generated for thermal protection system analysis and flight instrumentation development. Finally, the aerother- modynamic effects of delaying launch until 2011 are previewed. Nomenclature 1 2 2 A reference area, 4 πD (m ) CD drag coefficient, D=q1A D aeroshell diameter (m) 2 Dim multi-component diffusion coefficient (m =s) ci species mass fraction H total enthalpy -

Aerocapture FS-Pdf.Indd
NASA Facts National Aeronautics and Space Administration Marshall Space Flight Center Huntsville, Alabama 35812 FS-2004-09-127-MSFC July 2004 Aerocapture Technology NASA technologists are working to develop ways to place robotic space vehicles into long-duration, scientific orbits around distant Solar System destinations without the need for the heavy, on-board fuel loads that have historically inhibited vehicle performance, mission dura- tion and available mass for science payloads. Aerocapture -- a flight maneuver that inserts a space- craft into its proper orbit once it arrives at a planet -- is part of a unique family of “aeroassist” technologies under consideration to achieve these goals and enable robust science missions to any planetary body with an appreciable atmosphere. Aerocapture technology is just one of many propulsion technologies being developed by NASA technologists and their partners in industry and academia, led by NASA’s In-Space Propulsion Technology Office at the Marshall Space Flight Center in Huntsville, Ala. The Center implements the In-Space Propulsion Technolo- gies Program on behalf of NASA’s Science Mission Directorate in Washington. Aerocapture uses a planet’s or moon’s atmosphere to accomplish a quick, near-propellantless orbit capture to place a space vehicle in its proper orbit. The atmo- sphere is used as a brake to slow down a spacecraft, transferring the energy associated with the vehicle’s high speed into thermal energy. Aerocapture entering Mars Orbit. The aerocapture maneuver starts with an approach trajectory into the atmosphere of the target body. The dense atmosphere creates friction, slowing the craft and placing it into an elliptical orbit -- an oval shaped orbit. -

Up, Up, and Away by James J
www.astrosociety.org/uitc No. 34 - Spring 1996 © 1996, Astronomical Society of the Pacific, 390 Ashton Avenue, San Francisco, CA 94112. Up, Up, and Away by James J. Secosky, Bloomfield Central School and George Musser, Astronomical Society of the Pacific Want to take a tour of space? Then just flip around the channels on cable TV. Weather Channel forecasts, CNN newscasts, ESPN sportscasts: They all depend on satellites in Earth orbit. Or call your friends on Mauritius, Madagascar, or Maui: A satellite will relay your voice. Worried about the ozone hole over Antarctica or mass graves in Bosnia? Orbital outposts are keeping watch. The challenge these days is finding something that doesn't involve satellites in one way or other. And satellites are just one perk of the Space Age. Farther afield, robotic space probes have examined all the planets except Pluto, leading to a revolution in the Earth sciences -- from studies of plate tectonics to models of global warming -- now that scientists can compare our world to its planetary siblings. Over 300 people from 26 countries have gone into space, including the 24 astronauts who went on or near the Moon. Who knows how many will go in the next hundred years? In short, space travel has become a part of our lives. But what goes on behind the scenes? It turns out that satellites and spaceships depend on some of the most basic concepts of physics. So space travel isn't just fun to think about; it is a firm grounding in many of the principles that govern our world and our universe.