Smart Landing Technology for Lunar/Planetary Exploration
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Exploration of the Moon
Exploration of the Moon The physical exploration of the Moon began when Luna 2, a space probe launched by the Soviet Union, made an impact on the surface of the Moon on September 14, 1959. Prior to that the only available means of exploration had been observation from Earth. The invention of the optical telescope brought about the first leap in the quality of lunar observations. Galileo Galilei is generally credited as the first person to use a telescope for astronomical purposes; having made his own telescope in 1609, the mountains and craters on the lunar surface were among his first observations using it. NASA's Apollo program was the first, and to date only, mission to successfully land humans on the Moon, which it did six times. The first landing took place in 1969, when astronauts placed scientific instruments and returnedlunar samples to Earth. Apollo 12 Lunar Module Intrepid prepares to descend towards the surface of the Moon. NASA photo. Contents Early history Space race Recent exploration Plans Past and future lunar missions See also References External links Early history The ancient Greek philosopher Anaxagoras (d. 428 BC) reasoned that the Sun and Moon were both giant spherical rocks, and that the latter reflected the light of the former. His non-religious view of the heavens was one cause for his imprisonment and eventual exile.[1] In his little book On the Face in the Moon's Orb, Plutarch suggested that the Moon had deep recesses in which the light of the Sun did not reach and that the spots are nothing but the shadows of rivers or deep chasms. -
Spacecraft Deliberately Crashed on the Lunar Surface
A Summary of Human History on the Moon Only One of These Footprints is Protected The narrative of human history on the Moon represents the dawn of our evolution into a spacefaring species. The landing sites - hard, soft and crewed - are the ultimate example of universal human heritage; a true memorial to human ingenuity and accomplishment. They mark humankind’s greatest technological achievements, and they are the first archaeological sites with human activity that are not on Earth. We believe our cultural heritage in outer space, including our first Moonprints, deserves to be protected the same way we protect our first bipedal footsteps in Laetoli, Tanzania. Credit: John Reader/Science Photo Library Luna 2 is the first human-made object to impact our Moon. 2 September 1959: First Human Object Impacts the Moon On 12 September 1959, a rocket launched from Earth carrying a 390 kg spacecraft headed to the Moon. Luna 2 flew through space for more than 30 hours before releasing a bright orange cloud of sodium gas which both allowed scientists to track the spacecraft and provided data on the behavior of gas in space. On 14 September 1959, Luna 2 crash-landed on the Moon, as did part of the rocket that carried the spacecraft there. These were the first items humans placed on an extraterrestrial surface. Ever. Luna 2 carried a sphere, like the one pictured here, covered with medallions stamped with the emblem of the Soviet Union and the year. When Luna 2 impacted the Moon, the sphere was ejected and the medallions were scattered across the lunar Credit: Patrick Pelletier surface where they remain, undisturbed, to this day. -
Surveyor 1 Space- Craft on June 2, 1966 As Seen by the Narrow Angle Camera of the Lunar Re- Connaissance Orbiter Taken on July 17, 2009 (Also See Fig
i “Project Surveyor, in particular, removed any doubt that it was possible for Americans to land on the Moon and explore its surface.” — Harrison H. Schmitt, Apollo 17 Scientist-Astronaut ii Frontispiece: Landing site of the Surveyor 1 space- craft on June 2, 1966 as seen by the narrow angle camera of the Lunar Re- connaissance Orbiter taken on July 17, 2009 (also see Fig. 13). The white square in the upper photo outlines the area of the enlarged view below. The spacecraft is ca. 3.3 m tall and is casting a 15 m shadow to the East. (NASA/LROC/ ASU/GSFC photos) iii iv Surveyor I: America’s First Moon Landing by William F. Mellberg v © 2014, 2015 William F. Mellberg vi About the author: William Mellberg was a marketing and public relations representative with Fokker Aircraft. He is also an aerospace historian, having published many articles on both the development of airplanes and space vehicles in various magazines. He is the author of Famous Airliners and Moon Missions. He also serves as co-Editor of Harrison H. Schmitt’s website: http://americasuncommonsense.com Acknowledgments: The support and recollections of Frank Mellberg, Harrison Schmitt, Justin Rennilson, Alexander Gurshstein, Paul Spudis, Ronald Wells, Colin Mackellar and Dwight Steven- Boniecki is gratefully acknowledged. vii Surveyor I: America’s First Moon Landing by William F. Mellberg A Journey of 250,000 Miles . December 14, 2013. China’s Chang’e 3 spacecraft successfully touched down on the Moon at 1311 GMT (2111 Beijing Time). The landing site was in Mare Imbrium, the Sea of Rains, about 25 miles (40 km) south of the small crater, Laplace F, and roughly 100 miles (160 km) east of its original target in Sinus Iridum, the Bay of Rainbows. -

(Est Pub Date) Sid: Preliminary Analysis of Luna 9
Directorate of Science and Technology [b)[1J TOP SECReT [b)[3J CONTENTS Preliminary Analysis of Luna 9 . • . TOP SBGRET ''OP 8BCRET PRELIMINARY ANALYSIS OF LUNA 9 SUMMARY AND CONCLUSIONS The success of Luna 9 in soft-landing on the moon and transmitting data back to the earth represents a significant accomplishment in the Soviet lunar ex ploration program. The numerous un successful efforts that preceded Luna 9 indicate the high priority placed on a lunar landing by the USSR. Information derived from Luna 9 is valuable to both the United States and In addition, the Soviets said that Luna 9 the Soviet Union. Luna 9 proved that made radiation measurements and found a vehicle can be successfully softlanded that the radiation level on the moon is on the moon. This in turn, may lead to well within the acceptable limits for some optimism regarding future manned human beings. The Luna 9 payload lunar landings. appears to be of relatively simple design using subsystems of minimum com plexity consistent with achieving its mis sions. Mar 66 - 1 - TOP 8ECRET DISCUSSION Previous Launch AttemPts teries were contained inside the sphere. The station was said to be about two feet Luna 9 was the twelfth attempted lunar above the lunar surface, but it is not clear mission* in a program dating back to whether this figure refers to the diameter January 1963. Of the previous 11 at of the sphere or to the height ofthe photo tempts, four failed while in their park facsimile viewing device above the sur ing orbit, two failed during ejection from face. -

Deep Space Chronicle Deep Space Chronicle: a Chronology of Deep Space and Planetary Probes, 1958–2000 | Asifa
dsc_cover (Converted)-1 8/6/02 10:33 AM Page 1 Deep Space Chronicle Deep Space Chronicle: A Chronology ofDeep Space and Planetary Probes, 1958–2000 |Asif A.Siddiqi National Aeronautics and Space Administration NASA SP-2002-4524 A Chronology of Deep Space and Planetary Probes 1958–2000 Asif A. Siddiqi NASA SP-2002-4524 Monographs in Aerospace History Number 24 dsc_cover (Converted)-1 8/6/02 10:33 AM Page 2 Cover photo: A montage of planetary images taken by Mariner 10, the Mars Global Surveyor Orbiter, Voyager 1, and Voyager 2, all managed by the Jet Propulsion Laboratory in Pasadena, California. Included (from top to bottom) are images of Mercury, Venus, Earth (and Moon), Mars, Jupiter, Saturn, Uranus, and Neptune. The inner planets (Mercury, Venus, Earth and its Moon, and Mars) and the outer planets (Jupiter, Saturn, Uranus, and Neptune) are roughly to scale to each other. NASA SP-2002-4524 Deep Space Chronicle A Chronology of Deep Space and Planetary Probes 1958–2000 ASIF A. SIDDIQI Monographs in Aerospace History Number 24 June 2002 National Aeronautics and Space Administration Office of External Relations NASA History Office Washington, DC 20546-0001 Library of Congress Cataloging-in-Publication Data Siddiqi, Asif A., 1966 Deep space chronicle: a chronology of deep space and planetary probes, 1958-2000 / by Asif A. Siddiqi. p.cm. – (Monographs in aerospace history; no. 24) (NASA SP; 2002-4524) Includes bibliographical references and index. 1. Space flight—History—20th century. I. Title. II. Series. III. NASA SP; 4524 TL 790.S53 2002 629.4’1’0904—dc21 2001044012 Table of Contents Foreword by Roger D. -

Preliminary Analysis of Luna-9 Photography
if • : ' • .:; • • •• • ·~... : • . I . • . Approved tSfDRiise 2000/04/17 : CIA·RDP7~B04560A00570o~1oo;s..:O t t ... - I .a :ir---m ~ -i;o ~ i. ! ,~ .. : t· ·- ; ~ ~ 4 .. - TECHNICAL PQ_ ,_ lfCATIO.~~ , ... J - - - - - - PRELIMINARY ANALYSIS - OF LUNA-9 PHOTOGRAPHY - NPIC/R-5017/66 - JUNE 1966 - - .. O,.OUf' 1 ltXCLUO&O ""OM AUTOMATIC OOWNG .. AOINQ - ANO OECLA&II .. ICATION - Approved For Release 2000~f't:lftfA·RDP78804560A00570001 u.. ,o-u Approved For Release 2000/04/17 : CIA-RDP7BB04560A005700010015-0 - - - WARNING Tbla docu111ant oonblns inform~Uon affecUng the national delenae of the tlnlted Stataa wftbfn the mean i n~ of Title 18, aotat l oa~ • 798 and 794, or the U.S. Code . aa amended. lUI tranamlaalon or : evelatlon of Ita c••ntanta to or receipt by an unauthorized person Ia • prohibited by law. · - - - Approved For Release 2000/04/17: CIA-RDP78804560A005700010015-0 .. Approved For Release 2000/04/17: CIA-~Bi.Js&OA005700010015-0 NPIC/R-5017/66 - - PRELIMINARY ANALYSIS OF LUNA-9 PHOTOGRAPHY • Introduction In response to CIA/FMSAC requirement C-DS6-83,440, this report contains the results of a preliminary analysis of Luna-9 photography. As performed by the Technical Intelligence Division ot the National Photographic Interpretation Center, the objective of the analysis was to provide information about the photographic system, the spacecraft, and the lunar su~face independent ot previously published Soviet and I u.s. data. Considering the quality ot the photography, the available collateral material, and the effort to provide timely data, the -derived - results must be accepted as preliminary and subject to refinement by - further analysis. • - .. -I ; : .. • 1 . Approved For Release 2000/04/17 : CIA-R~~60A005700010015-0 _c~~~-- NPIC/R-5017/66 Approved For Release 2000/04117: CIA-RYP'H1!104560A005700010015-0 - A. -

(NORAD), Weekly Intelligence Review
DECLASSIFIED UNDER AUTHORITY OF THE INTERAGENCY SECURITY CLASSIFICATION APPEALS PANEL, E.0.13526, SECTION 5.3(b)(3) ISCAP APPEAL NO. 2009-068, document no.114 DECLASSIFICATION DATE: February 25, 2015 'lona.r panor·ama ·On 2·seq_tjons) photqgraphe.tf by tFt.e Sovietpr.obe\Luna"9. parts,of bra~Jng unjt c-an be seen in upper Jta.H. lFrom Izvestia) .• FEe 2 1 l9~:S . ~""~'f"(t~~J i"r'>o~ , P.o~tal :Re cr i:;t rY lfo .. ?J.if',/t/ k. '-l • &.~!l t.. ....... ~ ~ ·~ ~ E)\ a "'0 Js.sue No. 7166, 18 February 1966 $'>.__; N 6' The WJR Brief b:. () ·0': _:..: f1 :~C f~ Ll:~ · 1 ' U-!· ( . ~ :\[-.!1) ( )_· ::.:;1;-.\l . L S l · ; ;~_,.::r:· liS n. r: P Oi\ T 1 ~l f p', oi ! 00\lZ, J u :reh < ~ O :>MOS t•J :~ Pf ·rO i :t .::-~ tt·l .• ~ • ·· .-~~~-- ~ ~ · :· ·ft=' ~· : \:' · •r: t<: Pl;,YLO.AJ) M:\ Y HA VE : F' AJ L I~- n l\Ht~ ht h"'t'C htod -c ,)~ f'!'1 oz 51 nd.s don . 5 J''El1 L All><CH r-'IdLS , P F CH:\1\!1 1 TES 'i vP SS · '' JC.lHv1 IN S PACT g o _u; I 'J Portion identified as non i 7 responsive to the appeal MlSSrt.E lM"'GF; Fr!W'.:G LOC For J .J·l\ n· l.4 """· Portion identified as non :. , responsive to the appeal 22 Portion identified as non ?.-7 responsive to the appeal ?. 0 ~ 2 i! ~ 0<:) 0 Z7 C OS".tOS i Oi r\ PHOTOR.F:CCJ·: SA'tfJ: LLi u,;, iJOV !J". -

The Impact of Lunar Dust on Human Exploration
The Impact of Lunar Dust on Human Exploration The Impact of Lunar Dust on Human Exploration Edited by Joel S. Levine The Impact of Lunar Dust on Human Exploration Edited by Joel S. Levine This book first published 2021 Cambridge Scholars Publishing Lady Stephenson Library, Newcastle upon Tyne, NE6 2PA, UK British Library Cataloguing in Publication Data A catalogue record for this book is available from the British Library Copyright © 2021 by Joel S. Levine and contributors All rights for this book reserved. No part of this book may be reproduced, stored in a retrieval system, or transmitted, in any form or by any means, electronic, mechanical, photocopying, recording or otherwise, without the prior permission of the copyright owner. ISBN (10): 1-5275-6308-1 ISBN (13): 978-1-5275-6308-7 TABLE OF CONTENTS Preface ......................................................................................................... x Joel S. Levine Remembrance. Brian J. O’Brien: From the Earth to the Moon ................ xvi Rick Chappell, Jim Burch, Patricia Reiff, and Jackie Reasoner Section One: The Apollo Experience and Preparing for the Artemis Missions Chapter One ................................................................................................. 2 Measurements of Surface Moondust and Its Movement on the Apollo Missions: A Personal Journey Brian J. O’Brien Chapter Two .............................................................................................. 41 Lunar Dust and Its Impact on Human Exploration: Identifying the Problems -
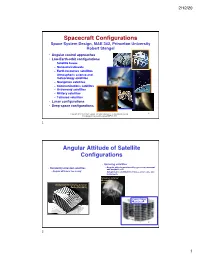
10. Spacecraft Configurations MAE 342 2016
2/12/20 Spacecraft Configurations Space System Design, MAE 342, Princeton University Robert Stengel • Angular control approaches • Low-Earth-orbit configurations – Satellite buses – Nanosats/cubesats – Earth resources satellites – Atmospheric science and meteorology satellites – Navigation satellites – Communications satellites – Astronomy satellites – Military satellites – Tethered satellites • Lunar configurations • Deep-space configurations Copyright 2016 by Robert Stengel. All rights reserved. For educational use only. 1 http://www.princeton.edu/~stengel/MAE342.html 1 Angular Attitude of Satellite Configurations • Spinning satellites – Angular attitude maintained by gyroscopic moment • Randomly oriented satellites and magnetic coil – Angular attitude is free to vary – Axisymmetric distribution of mass, solar cells, and instruments Television Infrared Observation (TIROS-7) Orbital Satellite Carrying Amateur Radio (OSCAR-1) ESSA-2 TIROS “Cartwheel” 2 2 1 2/12/20 Attitude-Controlled Satellite Configurations • Dual-spin satellites • Attitude-controlled satellites – Angular attitude maintained by gyroscopic moment and thrusters – Angular attitude maintained by 3-axis control system – Axisymmetric distribution of mass and solar cells – Non-symmetric distribution of mass, solar cells – Instruments and antennas do not spin and instruments INTELSAT-IVA NOAA-17 3 3 LADEE Bus Modules Satellite Buses Standardization of common components for a variety of missions Modular Common Spacecraft Bus Lander Congiguration 4 4 2 2/12/20 Hine et al 5 5 Evolution -

The Moon As a Laboratory for Biological Contamination Research
The Moon As a Laboratory for Biological Contamina8on Research Jason P. Dworkin1, Daniel P. Glavin1, Mark Lupisella1, David R. Williams1, Gerhard Kminek2, and John D. Rummel3 1NASA Goddard Space Flight Center, Greenbelt, MD 20771, USA 2European Space AgenCy, Noordwijk, The Netherlands 3SETI InsQtute, Mountain View, CA 94043, USA Introduction Catalog of Lunar Artifacts Some Apollo Sites Spacecraft Landing Type Landing Date Latitude, Longitude Ref. The Moon provides a high fidelity test-bed to prepare for the Luna 2 Impact 14 September 1959 29.1 N, 0 E a Ranger 4 Impact 26 April 1962 15.5 S, 130.7 W b The microbial analysis of exploration of Mars, Europa, Enceladus, etc. Ranger 6 Impact 2 February 1964 9.39 N, 21.48 E c the Surveyor 3 camera Ranger 7 Impact 31 July 1964 10.63 S, 20.68 W c returned by Apollo 12 is Much of our knowledge of planetary protection and contamination Ranger 8 Impact 20 February 1965 2.64 N, 24.79 E c flawed. We can do better. Ranger 9 Impact 24 March 1965 12.83 S, 2.39 W c science are based on models, brief and small experiments, or Luna 5 Impact 12 May 1965 31 S, 8 W b measurements in low Earth orbit. Luna 7 Impact 7 October 1965 9 N, 49 W b Luna 8 Impact 6 December 1965 9.1 N, 63.3 W b Experiments on the Moon could be piggybacked on human Luna 9 Soft Landing 3 February 1966 7.13 N, 64.37 W b Surveyor 1 Soft Landing 2 June 1966 2.47 S, 43.34 W c exploration or use the debris from past missions to test and Luna 10 Impact Unknown (1966) Unknown d expand our current understanding to reduce the cost and/or risk Luna 11 Impact Unknown (1966) Unknown d Surveyor 2 Impact 23 September 1966 5.5 N, 12.0 W b of future missions to restricted destinations in the solar system. -

Moon Landings - Luna 9
Age Research cards 7-11 years Moon landings - Luna 9 About Credit-Pline On the 3 February 1966, Luna 9 made history by being the first crewless space mission to make a soft landing on the surface of the Moon. It was the ninth mission in the Soviet Union’s Luna programme (the previous five missions had all experienced spacecraft failure). The Soviet Union existed from 1922 to 1991 and was the largest country in the world; it was made up of 15 states, the largest of which was the Russian Republic, now called Russia. The Space Race is a term that is used to describe the competition between the United States of America and the Soviet Union which lasted from 1955 to 1969, as both countries aimed to be the first to get humans to the Moon. Working scientifically The Luna 9 spacecraft had a mass of 98kg (about outwards to make sure the spacecraft was stable the same as a baby elephant) and it carried before it began its scientific exploration. communication equipment to send information back to Earth, a clock, a heating system, a power The camera on board took many photographs of source and a television system. The spacecraft the lunar surface including some panoramic included scientific equipment for two enquiries: images. These images were transmitted back to one to find out what the lunar surface was like; Earth using radio waves. Although the Soviet and another to find out how much dangerous Union didn’t release these photographs to the rest radiation there was on the lunar surface. -

Cartography for Lunar Exploration: 2006 Status and Planned Missions
CARTOGRAPHY FOR LUNAR EXPLORATION: 2006 STATUS AND PLANNED MISSIONS R.L. Kirk, B.A. Archinal, L.R. Gaddis, and M.R. Rosiek U.S. Geological Survey, Flagstaff, AZ 86001, USA - [email protected] Commission IV, WG IV/7 KEY WORDS: Photogrammetry, Cartography, Geodesy, Extra-terrestrial, Exploration, Space, Moon, History, Future ABSTRACT: The initial spacecraft exploration of the Moon in the 1960s–70s yielded extensive data, primarily in the form of film and television images, that were used to produce a large number of hardcopy maps by conventional techniques. A second era of exploration, beginning in the early 1990s, has produced digital data including global multispectral imagery and altimetry, from which a new generation of digital map products tied to a rapidly evolving global control network has been made. Efforts are also underway to scan the earlier hardcopy maps for online distribution and to digitize the film images themselves so that modern processing techniques can be used to make high-resolution digital terrain models (DTMs) and image mosaics consistent with the current global control. The pace of lunar exploration is about to accelerate dramatically, with as many of seven new missions planned for the current decade. These missions, of which the most important for cartography are SMART-1 (Europe), SELENE (Japan), Chang'E-1 (China), Chandrayaan-1 (India), and Lunar Reconnaissance Orbiter (USA), will return a volume of data exceeding that of all previous lunar and planetary missions combined. Framing and scanner camera images, including multispectral and stereo data, hyperspectral images, synthetic aperture radar (SAR) images, and laser altimetry will all be collected, including, in most cases, multiple datasets of each type.