Symmetry Groups of the Platonic Solids
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

In Order for the Figure to Map Onto Itself, the Line of Reflection Must Go Through the Center Point
3-5 Symmetry State whether the figure appears to have line symmetry. Write yes or no. If so, copy the figure, draw all lines of symmetry, and state their number. 1. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The figure has reflectional symmetry. In order for the figure to map onto itself, the line of reflection must go through the center point. Two lines of reflection go through the sides of the figure. Two lines of reflection go through the vertices of the figure. Thus, there are four possible lines that go through the center and are lines of reflections. Therefore, the figure has four lines of symmetry. eSolutionsANSWER: Manual - Powered by Cognero Page 1 yes; 4 2. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure does not have reflectional symmetry. There is no way to fold or reflect it onto itself. ANSWER: no 3. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure has reflectional symmetry. The figure has a vertical line of symmetry. It does not have a horizontal line of symmetry. The figure does not have a line of symmetry through the vertices. Thus, the figure has only one line of symmetry. ANSWER: yes; 1 State whether the figure has rotational symmetry. Write yes or no. If so, copy the figure, locate the center of symmetry, and state the order and magnitude of symmetry. -

Snub ���Cell �Tetricosa
E COLE NORMALE SUPERIEURE ________________________ A Zo o of ` embeddable Polytopal Graphs Michel DEZA VP GRISHUHKIN LIENS ________________________ Département de Mathématiques et Informatique CNRS URA 1327 A Zo o of ` embeddable Polytopal Graphs Michel DEZA VP GRISHUHKIN LIENS January Lab oratoire dInformatique de lEcole Normale Superieure rue dUlm PARIS Cedex Tel Adresse electronique dmiensfr CEMI Russian Academy of Sciences Moscow A zo o of l embeddable p olytopal graphs MDeza CNRS Ecole Normale Superieure Paris VPGrishukhin CEMI Russian Academy of Sciences Moscow Abstract A simple graph G V E is called l graph if for some n 2 IN there 1 exists a vertexaddressing of each vertex v of G by a vertex av of the n cub e H preserving up to the scale the graph distance ie d v v n G d av av for all v 2 V We distinguish l graphs b etween skeletons H 1 n of a variety of well known classes of p olytop es semiregular regularfaced zonotop es Delaunay p olytop es of dimension and several generalizations of prisms and antiprisms Introduction Some notation and prop erties of p olytopal graphs and hypermetrics Vector representations of l metrics and hypermetrics 1 Regularfaced p olytop es Regular p olytop es Semiregular not regular p olytop es Regularfaced not semiregularp olytop es of dimension Prismatic graphs Moscow and Glob e graphs Stellated k gons Cup olas Antiwebs Capp ed antiprisms towers and fullerenes regularfaced not semiregular p olyhedra Zonotop es Delaunay p olytop es Small -

Archimedean Solids
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2008 Archimedean Solids Anna Anderson University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Anderson, Anna, "Archimedean Solids" (2008). MAT Exam Expository Papers. 4. https://digitalcommons.unl.edu/mathmidexppap/4 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Archimedean Solids Anna Anderson In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. Jim Lewis, Advisor July 2008 2 Archimedean Solids A polygon is a simple, closed, planar figure with sides formed by joining line segments, where each line segment intersects exactly two others. If all of the sides have the same length and all of the angles are congruent, the polygon is called regular. The sum of the angles of a regular polygon with n sides, where n is 3 or more, is 180° x (n – 2) degrees. If a regular polygon were connected with other regular polygons in three dimensional space, a polyhedron could be created. In geometry, a polyhedron is a three- dimensional solid which consists of a collection of polygons joined at their edges. The word polyhedron is derived from the Greek word poly (many) and the Indo-European term hedron (seat). -

The Cubic Groups
The Cubic Groups Baccalaureate Thesis in Electrical Engineering Author: Supervisor: Sana Zunic Dr. Wolfgang Herfort 0627758 Vienna University of Technology May 13, 2010 Contents 1 Concepts from Algebra 4 1.1 Groups . 4 1.2 Subgroups . 4 1.3 Actions . 5 2 Concepts from Crystallography 6 2.1 Space Groups and their Classification . 6 2.2 Motions in R3 ............................. 8 2.3 Cubic Lattices . 9 2.4 Space Groups with a Cubic Lattice . 10 3 The Octahedral Symmetry Groups 11 3.1 The Elements of O and Oh ..................... 11 3.2 A Presentation of Oh ......................... 14 3.3 The Subgroups of Oh ......................... 14 2 Abstract After introducing basics from (mathematical) crystallography we turn to the description of the octahedral symmetry groups { the symmetry group(s) of a cube. Preface The intention of this account is to provide a description of the octahedral sym- metry groups { symmetry group(s) of the cube. We first give the basic idea (without proofs) of mathematical crystallography, namely that the 219 space groups correspond to the 7 crystal systems. After this we come to describing cubic lattices { such ones that are built from \cubic cells". Finally, among the cubic lattices, we discuss briefly the ones on which O and Oh act. After this we provide lists of the elements and the subgroups of Oh. A presentation of Oh in terms of generators and relations { using the Dynkin diagram B3 is also given. It is our hope that this account is accessible to both { the mathematician and the engineer. The picture on the title page reflects Ha¨uy'sidea of crystal structure [4]. -

Chapter 1 – Symmetry of Molecules – P. 1
Chapter 1 – Symmetry of Molecules – p. 1 - 1. Symmetry of Molecules 1.1 Symmetry Elements · Symmetry operation: Operation that transforms a molecule to an equivalent position and orientation, i.e. after the operation every point of the molecule is coincident with an equivalent point. · Symmetry element: Geometrical entity (line, plane or point) which respect to which one or more symmetry operations can be carried out. In molecules there are only four types of symmetry elements or operations: · Mirror planes: reflection with respect to plane; notation: s · Center of inversion: inversion of all atom positions with respect to inversion center, notation i · Proper axis: Rotation by 2p/n with respect to the axis, notation Cn · Improper axis: Rotation by 2p/n with respect to the axis, followed by reflection with respect to plane, perpendicular to axis, notation Sn Formally, this classification can be further simplified by expressing the inversion i as an improper rotation S2 and the reflection s as an improper rotation S1. Thus, the only symmetry elements in molecules are Cn and Sn. Important: Successive execution of two symmetry operation corresponds to another symmetry operation of the molecule. In order to make this statement a general rule, we require one more symmetry operation, the identity E. (1.1: Symmetry elements in CH4, successive execution of symmetry operations) 1.2. Systematic classification by symmetry groups According to their inherent symmetry elements, molecules can be classified systematically in so called symmetry groups. We use the so-called Schönfliess notation to name the groups, Chapter 1 – Symmetry of Molecules – p. 2 - which is the usual notation for molecules. -

Binary Icosahedral Group and 600-Cell
Article Binary Icosahedral Group and 600-Cell Jihyun Choi and Jae-Hyouk Lee * Department of Mathematics, Ewha Womans University 52, Ewhayeodae-gil, Seodaemun-gu, Seoul 03760, Korea; [email protected] * Correspondence: [email protected]; Tel.: +82-2-3277-3346 Received: 10 July 2018; Accepted: 26 July 2018; Published: 7 August 2018 Abstract: In this article, we have an explicit description of the binary isosahedral group as a 600-cell. We introduce a method to construct binary polyhedral groups as a subset of quaternions H via spin map of SO(3). In addition, we show that the binary icosahedral group in H is the set of vertices of a 600-cell by applying the Coxeter–Dynkin diagram of H4. Keywords: binary polyhedral group; icosahedron; dodecahedron; 600-cell MSC: 52B10, 52B11, 52B15 1. Introduction The classification of finite subgroups in SLn(C) derives attention from various research areas in mathematics. Especially when n = 2, it is related to McKay correspondence and ADE singularity theory [1]. The list of finite subgroups of SL2(C) consists of cyclic groups (Zn), binary dihedral groups corresponded to the symmetry group of regular 2n-gons, and binary polyhedral groups related to regular polyhedra. These are related to the classification of regular polyhedrons known as Platonic solids. There are five platonic solids (tetrahedron, cubic, octahedron, dodecahedron, icosahedron), but, as a regular polyhedron and its dual polyhedron are associated with the same symmetry groups, there are only three binary polyhedral groups(binary tetrahedral group 2T, binary octahedral group 2O, binary icosahedral group 2I) related to regular polyhedrons. -

Pose Estimation for Objects with Rotational Symmetry
Pose Estimation for Objects with Rotational Symmetry Enric Corona, Kaustav Kundu, Sanja Fidler Abstract— Pose estimation is a widely explored problem, enabling many robotic tasks such as grasping and manipulation. In this paper, we tackle the problem of pose estimation for objects that exhibit rotational symmetry, which are common in man-made and industrial environments. In particular, our aim is to infer poses for objects not seen at training time, but for which their 3D CAD models are available at test time. Previous X 2 X 1 X 2 X 1 work has tackled this problem by learning to compare captured Y ∼ 2 Y ∼ 2 Y ∼ 2 Y ∼ 2 views of real objects with the rendered views of their 3D CAD Z ∼ 6 Z ∼ 1 Z ∼ Z ∼ 1 ∼ ∼ ∼ ∞ ∼ models, by embedding them in a joint latent space using neural Fig. 1. Many industrial objects such as various tools exhibit rotational networks. We show that sidestepping the issue of symmetry symmetries. In our work, we address pose estimation for such objects. in this scenario during training leads to poor performance at test time. We propose a model that reasons about rotational symmetry during training by having access to only a small set of that this is not a trivial task, as the rendered views may look symmetry-labeled objects, whereby exploiting a large collection very different from objects in real images, both because of of unlabeled CAD models. We demonstrate that our approach different background, lighting, and possible occlusion that significantly outperforms a naively trained neural network on arise in real scenes. -
12-5 Worksheet Part C
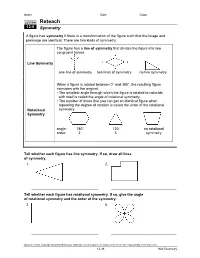
Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry A figure has symmetry if there is a transformation of the figure such that the image and preimage are identical. There are two kinds of symmetry. The figure has a line of symmetry that divides the figure into two congruent halves. Line Symmetry one line of symmetry two lines of symmetry no line symmetry When a figure is rotated between 0° and 360°, the resulting figure coincides with the original. • The smallest angle through which the figure is rotated to coincide with itself is called the angle of rotational symmetry. • The number of times that you can get an identical figure when repeating the degree of rotation is called the order of the rotational Rotational symmetry. Symmetry angle: 180° 120° no rotational order: 2 3 symmetry Tell whether each figure has line symmetry. If so, draw all lines of symmetry. 1. 2. _________________________________________ ________________________________________ Tell whether each figure has rotational symmetry. If so, give the angle of rotational symmetry and the order of the symmetry. 3. 4. _________________________________________ ________________________________________ Original content Copyright © by Holt McDougal. Additions and changes to the original content are the responsibility of the instructor. 12-38 Holt Geometry Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry continued Three-dimensional figures can also have symmetry. Symmetry in Three Description Example Dimensions A plane can divide a figure into two Plane Symmetry congruent halves. There is a line about which a figure Symmetry About can be rotated so that the image and an Axis preimage are identical. -

The Crystal Forms of Diamond and Their Significance
THE CRYSTAL FORMS OF DIAMOND AND THEIR SIGNIFICANCE BY SIR C. V. RAMAN AND S. RAMASESHAN (From the Department of Physics, Indian Institute of Science, Bangalore) Received for publication, June 4, 1946 CONTENTS 1. Introductory Statement. 2. General Descriptive Characters. 3~ Some Theoretical Considerations. 4. Geometric Preliminaries. 5. The Configuration of the Edges. 6. The Crystal Symmetry of Diamond. 7. Classification of the Crystal Forros. 8. The Haidinger Diamond. 9. The Triangular Twins. 10. Some Descriptive Notes. 11. The Allo- tropic Modifications of Diamond. 12. Summary. References. Plates. 1. ~NTRODUCTORY STATEMENT THE" crystallography of diamond presents problems of peculiar interest and difficulty. The material as found is usually in the form of complete crystals bounded on all sides by their natural faces, but strangely enough, these faces generally exhibit a marked curvature. The diamonds found in the State of Panna in Central India, for example, are invariably of this kind. Other diamondsJas for example a group of specimens recently acquired for our studies ffom Hyderabad (Deccan)--show both plane and curved faces in combination. Even those diamonds which at first sight seem to resemble the standard forms of geometric crystallography, such as the rhombic dodeca- hedron or the octahedron, are found on scrutiny to exhibit features which preclude such an identification. This is the case, for example, witb. the South African diamonds presented to us for the purpose of these studŸ by the De Beers Mining Corporation of Kimberley. From these facts it is evident that the crystallography of diamond stands in a class by itself apart from that of other substances and needs to be approached from a distinctive stand- point. -
Symmetry and Groups, and Crystal Structures
CHAPTER 3: SYMMETRY AND GROUPS, AND CRYSTAL STRUCTURES Sarah Lambart RECAP CHAP. 2 2 different types of close packing: hcp: tetrahedral interstice (ABABA) ccp: octahedral interstice (ABCABC) Definitions: The coordination number or CN is the number of closest neighbors of opposite charge around an ion. It can range from 2 to 12 in ionic structures. These structures are called coordination polyhedron. RECAP CHAP. 2 Rx/Rz C.N. Type Hexagonal or An ideal close-packing of sphere 1.0 12 Cubic for a given CN, can only be Closest Packing achieved for a specific ratio of 1.0 - 0.732 8 Cubic ionic radii between the anions and 0.732 - 0.414 6 Octahedral Tetrahedral (ex.: the cations. 0.414 - 0.225 4 4- SiO4 ) 0.225 - 0.155 3 Triangular <0.155 2 Linear RECAP CHAP. 2 Pauling’s rule: #1: the coodination polyhedron is defined by the ratio Rcation/Ranion #2: The Electrostatic Valency (e.v.) Principle: ev = Z/CN #3: Shared edges and faces of coordination polyhedra decreases the stability of the crystal. #4: In crystal with different cations, those of high valency and small CN tend not to share polyhedral elements #5: The principle of parsimony: The number of different sites in a crystal tends to be small. CONTENT CHAP. 3 (2-3 LECTURES) Definitions: unit cell and lattice 7 Crystal systems 14 Bravais lattices Element of symmetry CRYSTAL LATTICE IN TWO DIMENSIONS A crystal consists of atoms, molecules, or ions in a pattern that repeats in three dimensions. The geometry of the repeating pattern of a crystal can be described in terms of a crystal lattice, constructed by connecting equivalent points throughout the crystal. -

Hwsolns5scan.Pdf
Math 462: Homework 5 Paul Hacking 3/27/10 (1) One way to describe a polyhedron is by cutting along some of the edges and folding it flat in the plane. The diagram obtained in this way is called a net. For example here is a net for the cube: Draw nets for the tetrahedron, octahedron, and dodecahedron. +~tfl\ h~~1l1/\ \(j [ NJte: T~ i) Mq~ u,,,,, cMi (O/r.(J 1 (2) Another way to describe a polyhedron is as follows: imagine that the faces of the polyhedron arc made of glass, look through one of the faces and draw the image you see of the remaining faces of the polyhedron. This image is called a Schlegel diagram. For example here is a Schlegel diagram for the octahedron. Note that the face you are looking through is not. drawn, hut the boundary of that face corresponds to the boundary of the diagram. Now draw a Schlegel diagram for the dodecahedron. (:~) (a) A pyramid is a polyhedron obtained from a. polygon with Rome number n of sides by joining every vertex of the polygon to a point lying above the plane of the polygon. The polygon is called the base of the pyramid and the additional vertex is called the apex, For example the Egyptian pyramids have base a square (so n = 4) and the tetrahedron is a pyramid with base an equilateral 2 I triangle (so n = 3). Compute the number of vertices, edges; and faces of a pyramid with base a polygon with n Rides. (b) A prism is a polyhedron obtained from a polygon (called the base of the prism) as follows: translate the polygon some distance in the direction normal to the plane of the polygon, and join the vertices of the original polygon to the corresponding vertices of the translated polygon. -

Bridges Conference Proceedings Guidelines Word
Bridges 2019 Conference Proceedings Helixation Rinus Roelofs Lansinkweg 28, Hengelo, the Netherlands; [email protected] Abstract In the list of names of the regular and semi-regular polyhedra we find many names that refer to a process. Examples are ‘truncated’ cube and ‘stellated’ dodecahedron. And Luca Pacioli named some of his polyhedral objects ‘elevations’. This kind of name-giving makes it easier to understand these polyhedra. We can imagine the model as a result of a transformation. And nowadays we are able to visualize this process by using the technique of animation. Here I will to introduce ‘helixation’ as a process to get a better understanding of the Poinsot polyhedra. In this paper I will limit myself to uniform polyhedra. Introduction Most of the Archimedean solids can be derived by cutting away parts of a Platonic solid. This operation , with which we can generate most of the semi-regular solids, is called truncation. Figure 1: Truncation of the cube. We can truncate the vertices of a polyhedron until the original faces of the polyhedron become regular again. In Figure 1 this process is shown starting with a cube. In the third object in the row, the vertices are truncated in such a way that the square faces of the cube are transformed to regular octagons. The resulting object is the Archimedean solid, the truncated cube. We can continue the process until we reach the fifth object in the row, which again is an Archimedean solid, the cuboctahedron. The whole process or can be represented as an animation. Also elevation and stellation can be described as processes.