Arxiv:2105.14305V1 [Cs.CG] 29 May 2021
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Archimedean Solids
University of Nebraska - Lincoln DigitalCommons@University of Nebraska - Lincoln MAT Exam Expository Papers Math in the Middle Institute Partnership 7-2008 Archimedean Solids Anna Anderson University of Nebraska-Lincoln Follow this and additional works at: https://digitalcommons.unl.edu/mathmidexppap Part of the Science and Mathematics Education Commons Anderson, Anna, "Archimedean Solids" (2008). MAT Exam Expository Papers. 4. https://digitalcommons.unl.edu/mathmidexppap/4 This Article is brought to you for free and open access by the Math in the Middle Institute Partnership at DigitalCommons@University of Nebraska - Lincoln. It has been accepted for inclusion in MAT Exam Expository Papers by an authorized administrator of DigitalCommons@University of Nebraska - Lincoln. Archimedean Solids Anna Anderson In partial fulfillment of the requirements for the Master of Arts in Teaching with a Specialization in the Teaching of Middle Level Mathematics in the Department of Mathematics. Jim Lewis, Advisor July 2008 2 Archimedean Solids A polygon is a simple, closed, planar figure with sides formed by joining line segments, where each line segment intersects exactly two others. If all of the sides have the same length and all of the angles are congruent, the polygon is called regular. The sum of the angles of a regular polygon with n sides, where n is 3 or more, is 180° x (n – 2) degrees. If a regular polygon were connected with other regular polygons in three dimensional space, a polyhedron could be created. In geometry, a polyhedron is a three- dimensional solid which consists of a collection of polygons joined at their edges. The word polyhedron is derived from the Greek word poly (many) and the Indo-European term hedron (seat). -
Sonobe Assembly Guide for a Few Polyhedra
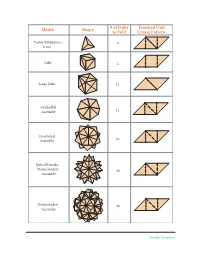
Model Shape # of Units Finished Unit to Fold Crease Pattern Toshie Takahama’s 3 Jewel Cube 6 Large Cube 12 Octahedral Assembly 12 Icosahedral Assembly 30 Spiked Pentakis Dodecahedral 60 Assembly Dodecahedral 90 Assembly 2 Sonobe Variations Sonobe Assembly Basics Sonobe assemblies are essentially “pyramidized” constructing a polyhedron, the key thing to re- polyhedra, each pyramid consisting of three So- member is that the diagonal ab of each Sonobe nobe units. The figure below shows a generic So- unit will lie along an edge of the polyhedron. nobe unit and how to form one pyramid. When a Pocket Tab Forming one Tab pyramid Pocket b A generic Sonobe unit representation Sonobe Assembly Guide for a Few Polyhedra 1. Toshie’s Jewel: Crease three finished units as tabs and pockets. This assembly is also sometimes explained in the table on page 2. Form a pyramid known as a Crane Egg. as above. Then turn the assembly upside down 2. Cube Assembly: Crease six finished units as and make another pyramid with the three loose explained in the table on page 2. Each face will be made up of 3 the center square of one unit and the tabs of two other units. 4 Do Steps 1 and 2 to form one face. Do Steps 3 and 4 to form one corner or vertex. Continue 1 2 interlocking in this manner to arrive at the finished cube. Sonobe Variations 3 3. Large Cube Assembly: Crease 12 finished units as explained on page 2. 5 6 3 The 12-unit large cube is the only assembly that does not involve pyramidizing. -

The Crystal Forms of Diamond and Their Significance
THE CRYSTAL FORMS OF DIAMOND AND THEIR SIGNIFICANCE BY SIR C. V. RAMAN AND S. RAMASESHAN (From the Department of Physics, Indian Institute of Science, Bangalore) Received for publication, June 4, 1946 CONTENTS 1. Introductory Statement. 2. General Descriptive Characters. 3~ Some Theoretical Considerations. 4. Geometric Preliminaries. 5. The Configuration of the Edges. 6. The Crystal Symmetry of Diamond. 7. Classification of the Crystal Forros. 8. The Haidinger Diamond. 9. The Triangular Twins. 10. Some Descriptive Notes. 11. The Allo- tropic Modifications of Diamond. 12. Summary. References. Plates. 1. ~NTRODUCTORY STATEMENT THE" crystallography of diamond presents problems of peculiar interest and difficulty. The material as found is usually in the form of complete crystals bounded on all sides by their natural faces, but strangely enough, these faces generally exhibit a marked curvature. The diamonds found in the State of Panna in Central India, for example, are invariably of this kind. Other diamondsJas for example a group of specimens recently acquired for our studies ffom Hyderabad (Deccan)--show both plane and curved faces in combination. Even those diamonds which at first sight seem to resemble the standard forms of geometric crystallography, such as the rhombic dodeca- hedron or the octahedron, are found on scrutiny to exhibit features which preclude such an identification. This is the case, for example, witb. the South African diamonds presented to us for the purpose of these studŸ by the De Beers Mining Corporation of Kimberley. From these facts it is evident that the crystallography of diamond stands in a class by itself apart from that of other substances and needs to be approached from a distinctive stand- point. -

Barn-Raising an Endo-Pentakis-Icosi-Dodecaherdon
BRIDGES Mathematical Connections in Art, Music, and Science Barn-Raising an Endo-Pentakis-Icosi-Dodecaherdon Eva Knoll and Simon Morgan Rice University Rice University School Mathematics Project MS-172 6100 Main Street Houston, Texas 77005 [email protected] Abstract The workshop is planned as the raising of an endo-pentakis-icosi-dodecaherdon with a 1 meter edge length. This collective experience will give the participants new insights about polyhedra in general. and deltahedra in particular. The specific method of construction applied here. using kite technology and the snowflake layout allows for a perspective entirely different from that found in the construction of hand-held models or the observation of computer animations. In the present case. the participants will be able to pace the area of the flat shape and physically enter the space defined by the polyhedron. Introduction 1.1 The Workshop. The event is set up so that the audience participates actively in the construction. First, the triangles are laid out by six groups of people in order to complete the net. Then the deltahedron is assembled collectively, under the direction of the artist. The large scale of the event is designed expressly to give the participant a new point of view with regards to polyhedra. Instead of the "God's eye view" of hand held shapes, or the tunnel vision allowed by computer modelling, the barn-raising will give the opportunity to observe the deltahedron on a human scale, where the shape's structure is tangible in terms of the whole body, not limited to the finger tips and the eye. -

Uniform Panoploid Tetracombs
Uniform Panoploid Tetracombs George Olshevsky TETRACOMB is a four-dimensional tessellation. In any tessellation, the honeycells, which are the n-dimensional polytopes that tessellate the space, Amust by definition adjoin precisely along their facets, that is, their ( n!1)- dimensional elements, so that each facet belongs to exactly two honeycells. In the case of tetracombs, the honeycells are four-dimensional polytopes, or polychora, and their facets are polyhedra. For a tessellation to be uniform, the honeycells must all be uniform polytopes, and the vertices must be transitive on the symmetry group of the tessellation. Loosely speaking, therefore, the vertices must be “surrounded all alike” by the honeycells that meet there. If a tessellation is such that every point of its space not on a boundary between honeycells lies in the interior of exactly one honeycell, then it is panoploid. If one or more points of the space not on a boundary between honeycells lie inside more than one honeycell, the tessellation is polyploid. Tessellations may also be constructed that have “holes,” that is, regions that lie inside none of the honeycells; such tessellations are called holeycombs. It is possible for a polyploid tessellation to also be a holeycomb, but not for a panoploid tessellation, which must fill the entire space exactly once. Polyploid tessellations are also called starcombs or star-tessellations. Holeycombs usually arise when (n!1)-dimensional tessellations are themselves permitted to be honeycells; these take up the otherwise free facets that bound the “holes,” so that all the facets continue to belong to two honeycells. In this essay, as per its title, we are concerned with just the uniform panoploid tetracombs. -

A Survey of Folding and Unfolding in Computational Geometry
Combinatorial and Computational Geometry MSRI Publications Volume 52, 2005 A Survey of Folding and Unfolding in Computational Geometry ERIK D. DEMAINE AND JOSEPH O’ROURKE Abstract. We survey results in a recent branch of computational geome- try: folding and unfolding of linkages, paper, and polyhedra. Contents 1. Introduction 168 2. Linkages 168 2.1. Definitions and fundamental questions 168 2.2. Fundamental questions in 2D 171 2.3. Fundamental questions in 3D 175 2.4. Fundamental questions in 4D and higher dimensions 181 2.5. Protein folding 181 3. Paper 183 3.1. Categorization 184 3.2. Origami design 185 3.3. Origami foldability 189 3.4. Flattening polyhedra 191 4. Polyhedra 193 4.1. Unfolding polyhedra 193 4.2. Folding polygons into convex polyhedra 196 4.3. Folding nets into nonconvex polyhedra 199 4.4. Continuously folding polyhedra 200 5. Conclusion and Higher Dimensions 201 Acknowledgements 202 References 202 Demaine was supported by NSF CAREER award CCF-0347776. O’Rourke was supported by NSF Distinguished Teaching Scholars award DUE-0123154. 167 168 ERIKD.DEMAINEANDJOSEPHO’ROURKE 1. Introduction Folding and unfolding problems have been implicit since Albrecht D¨urer [1525], but have not been studied extensively in the mathematical literature until re- cently. Over the past few years, there has been a surge of interest in these problems in discrete and computational geometry. This paper gives a brief sur- vey of most of the work in this area. Related, shorter surveys are [Connelly and Demaine 2004; Demaine 2001; Demaine and Demaine 2002; O’Rourke 2000]. We are currently preparing a monograph on the topic [Demaine and O’Rourke ≥ 2005]. -

Bridges Conference Proceedings Guidelines Word
Bridges 2019 Conference Proceedings Helixation Rinus Roelofs Lansinkweg 28, Hengelo, the Netherlands; [email protected] Abstract In the list of names of the regular and semi-regular polyhedra we find many names that refer to a process. Examples are ‘truncated’ cube and ‘stellated’ dodecahedron. And Luca Pacioli named some of his polyhedral objects ‘elevations’. This kind of name-giving makes it easier to understand these polyhedra. We can imagine the model as a result of a transformation. And nowadays we are able to visualize this process by using the technique of animation. Here I will to introduce ‘helixation’ as a process to get a better understanding of the Poinsot polyhedra. In this paper I will limit myself to uniform polyhedra. Introduction Most of the Archimedean solids can be derived by cutting away parts of a Platonic solid. This operation , with which we can generate most of the semi-regular solids, is called truncation. Figure 1: Truncation of the cube. We can truncate the vertices of a polyhedron until the original faces of the polyhedron become regular again. In Figure 1 this process is shown starting with a cube. In the third object in the row, the vertices are truncated in such a way that the square faces of the cube are transformed to regular octagons. The resulting object is the Archimedean solid, the truncated cube. We can continue the process until we reach the fifth object in the row, which again is an Archimedean solid, the cuboctahedron. The whole process or can be represented as an animation. Also elevation and stellation can be described as processes. -

Dodecahedron
Dodecahedron Figure 1 Regular Dodecahedron vertex labeling using “120 Polyhedron” vertex labels. COPYRIGHT 2007, Robert W. Gray Page 1 of 9 Encyclopedia Polyhedra: Last Revision: July 8, 2007 DODECAHEDRON Topology: Vertices = 20 Edges = 30 Faces = 12 pentagons Lengths: 15+ ϕ = 1.618 033 989 2 EL ≡ Edge length of regular Dodecahedron. 43ϕ + FA = EL 1.538 841 769 EL ≡ Face altitude. 2 ϕ DFV = EL ≅ 0.850 650 808 EL 5 15+ 20 ϕ DFE = EL ≅ 0.688 190 960 EL 10 3 DVV = ϕ EL ≅ 1.401 258 538 EL 2 1 DVE = ϕ 2 EL ≅ 1.309 016 994 EL 2 711+ ϕ DVF = EL ≅ 1.113 516 364 EL 20 COPYRIGHT 2007, Robert W. Gray Page 2 of 9 Encyclopedia Polyhedra: Last Revision: July 8, 2007 DODECAHEDRON Areas: 15+ 20 ϕ 2 2 Area of one pentagonal face = EL ≅ 1.720 477 401 EL 4 2 2 Total face area = 31520+ ϕ EL ≅ 20.645 728 807 EL Volume: 47+ ϕ 3 3 Cubic measure volume equation = EL ≅ 7.663 118 961 EL 2 38( + 14ϕ) 3 3 Synergetics' Tetra-volume equation = EL ≅ 65.023 720 585 EL 2 Angles: Face Angles: All face angles are 108°. Sum of face angles = 6480° Central Angles: ⎛⎞35− All central angles are = 2arcsin ⎜⎟ ≅ 41.810 314 896° ⎜⎟6 ⎝⎠ Dihedral Angles: ⎛⎞2 ϕ 2 All dihedral angles are = 2arcsin ⎜⎟ ≅ 116.565 051 177° ⎝⎠43ϕ + COPYRIGHT 2007, Robert W. Gray Page 3 of 9 Encyclopedia Polyhedra: Last Revision: July 8, 2007 DODECAHEDRON Additional Angle Information: Note that Central Angle(Dodecahedron) + Dihedral Angle(Icosahedron) = 180° Central Angle(Icosahedron) + Dihedral Angle(Dodecahedron) = 180° which is the case for dual polyhedra. -

Hexagonal Antiprism Tetragonal Bipyramid Dodecahedron
Call List hexagonal antiprism tetragonal bipyramid dodecahedron hemisphere icosahedron cube triangular bipyramid sphere octahedron cone triangular prism pentagonal bipyramid torus cylinder squarebased pyramid octagonal prism cuboid hexagonal prism pentagonal prism tetrahedron cube octahedron square antiprism ellipsoid pentagonal antiprism spheroid Created using www.BingoCardPrinter.com B I N G O hexagonal triangular squarebased tetrahedron antiprism cube prism pyramid tetragonal triangular pentagonal octagonal cube bipyramid bipyramid bipyramid prism octahedron Free square dodecahedron sphere Space cuboid antiprism hexagonal hemisphere octahedron torus prism ellipsoid pentagonal pentagonal icosahedron cone cylinder prism antiprism Created using www.BingoCardPrinter.com B I N G O triangular pentagonal triangular hemisphere cube prism antiprism bipyramid pentagonal hexagonal tetragonal torus bipyramid prism bipyramid cone square Free hexagonal octagonal tetrahedron antiprism Space antiprism prism squarebased dodecahedron ellipsoid cylinder octahedron pyramid pentagonal icosahedron sphere prism cuboid spheroid Created using www.BingoCardPrinter.com B I N G O cube hexagonal triangular icosahedron octahedron prism torus prism octagonal square dodecahedron hemisphere spheroid prism antiprism Free pentagonal octahedron squarebased pyramid Space cube antiprism hexagonal pentagonal triangular cone antiprism cuboid bipyramid bipyramid tetragonal cylinder tetrahedron ellipsoid bipyramid sphere Created using www.BingoCardPrinter.com B I N G O -

Decomposing Deltahedra
Decomposing Deltahedra Eva Knoll EK Design ([email protected]) Abstract Deltahedra are polyhedra with all equilateral triangular faces of the same size. We consider a class of we will call ‘regular’ deltahedra which possess the icosahedral rotational symmetry group and have either six or five triangles meeting at each vertex. Some, but not all of this class can be generated using operations of subdivision, stellation and truncation on the platonic solids. We develop a method of generating and classifying all deltahedra in this class using the idea of a generating vector on a triangular grid that is made into the net of the deltahedron. We observed and proved a geometric property of the length of these generating vectors and the surface area of the corresponding deltahedra. A consequence of this is that all deltahedra in our class have an integer multiple of 20 faces, starting with the icosahedron which has the minimum of 20 faces. Introduction The Japanese art of paper folding traditionally uses square or sometimes rectangular paper. The geometric styles such as modular Origami [4] reflect that paradigm in that the folds are determined by the geometry of the paper (the diagonals and bisectors of existing angles and lines). Using circular paper creates a completely different design structure. The fact that chords of radial length subdivide the circumference exactly 6 times allows the use of a 60 degree grid system [5]. This makes circular Origami a great tool to experiment with deltahedra (Deltahedra are polyhedra bound by equilateral triangles exclusively [3], [8]). After the barn-raising of an endo-pentakis icosi-dodecahedron (an 80 faced regular deltahedron) [Knoll & Morgan, 1999], an investigation of related deltahedra ensued. -

Universal Folding Pathways of Polyhedron Nets
Universal folding pathways of polyhedron nets Paul M. Dodda, Pablo F. Damascenob, and Sharon C. Glotzera,b,c,d,1 aChemical Engineering Department, University of Michigan, Ann Arbor, MI 48109; bApplied Physics Program, University of Michigan, Ann Arbor, MI 48109; cDepartment of Materials Science and Engineering, University of Michigan, Ann Arbor, MI 48109; and dBiointerfaces Institute, University of Michigan, Ann Arbor, MI 48109 Contributed by Sharon C. Glotzer, June 6, 2018 (sent for review January 17, 2018; reviewed by Nuno Araujo and Andrew L. Ferguson) Low-dimensional objects such as molecular strands, ladders, and navigate, thermodynamically, from a denatured (unfolded) state sheets have intrinsic features that affect their propensity to fold to a natured (folded) one. Even after many decades of study, into 3D objects. Understanding this relationship remains a chal- however, a universal relationship between molecular sequence lenge for de novo design of functional structures. Using molecular and folded state—which could provide crucial insight into the dynamics simulations, we investigate the refolding of the 24 causes and potential treatments of many diseases—remains out possible 2D unfoldings (“nets”) of the three simplest Platonic of reach (11–13). shapes and demonstrate that attributes of a net’s topology— In this work, we study the thermodynamic foldability of 2D net compactness and leaves on the cutting graph—correlate nets for all five Platonic solids. Despite being the simplest and with thermodynamic folding propensity. To -

Convex Polytopes and Tilings with Few Flag Orbits
Convex Polytopes and Tilings with Few Flag Orbits by Nicholas Matteo B.A. in Mathematics, Miami University M.A. in Mathematics, Miami University A dissertation submitted to The Faculty of the College of Science of Northeastern University in partial fulfillment of the requirements for the degree of Doctor of Philosophy April 14, 2015 Dissertation directed by Egon Schulte Professor of Mathematics Abstract of Dissertation The amount of symmetry possessed by a convex polytope, or a tiling by convex polytopes, is reflected by the number of orbits of its flags under the action of the Euclidean isometries preserving the polytope. The convex polytopes with only one flag orbit have been classified since the work of Schläfli in the 19th century. In this dissertation, convex polytopes with up to three flag orbits are classified. Two-orbit convex polytopes exist only in two or three dimensions, and the only ones whose combinatorial automorphism group is also two-orbit are the cuboctahedron, the icosidodecahedron, the rhombic dodecahedron, and the rhombic triacontahedron. Two-orbit face-to-face tilings by convex polytopes exist on E1, E2, and E3; the only ones which are also combinatorially two-orbit are the trihexagonal plane tiling, the rhombille plane tiling, the tetrahedral-octahedral honeycomb, and the rhombic dodecahedral honeycomb. Moreover, any combinatorially two-orbit convex polytope or tiling is isomorphic to one on the above list. Three-orbit convex polytopes exist in two through eight dimensions. There are infinitely many in three dimensions, including prisms over regular polygons, truncated Platonic solids, and their dual bipyramids and Kleetopes. There are infinitely many in four dimensions, comprising the rectified regular 4-polytopes, the p; p-duoprisms, the bitruncated 4-simplex, the bitruncated 24-cell, and their duals.