A Survey of Folding and Unfolding in Computational Geometry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Ununfoldable Polyhedra with Convex Faces
Ununfoldable Polyhedra with Convex Faces Marshall Bern¤ Erik D. Demainey David Eppsteinz Eric Kuox Andrea Mantler{ Jack Snoeyink{ k Abstract Unfolding a convex polyhedron into a simple planar polygon is a well-studied prob- lem. In this paper, we study the limits of unfoldability by studying nonconvex poly- hedra with the same combinatorial structure as convex polyhedra. In particular, we give two examples of polyhedra, one with 24 convex faces and one with 36 triangular faces, that cannot be unfolded by cutting along edges. We further show that such a polyhedron can indeed be unfolded if cuts are allowed to cross faces. Finally, we prove that \open" polyhedra with triangular faces may not be unfoldable no matter how they are cut. 1 Introduction A classic open question in geometry [5, 12, 20, 24] is whether every convex polyhedron can be cut along its edges and flattened into the plane without any overlap. Such a collection of cuts is called an edge cutting of the polyhedron, and the resulting simple polygon is called an edge unfolding or net. While the ¯rst explicit description of this problem is by Shephard in 1975 [24], it has been implicit since at least the time of Albrecht Durer,Ä circa 1500 [11]. It is widely conjectured that every convex polyhedron has an edge unfolding. Some recent support for this conjecture is that every triangulated convex polyhedron has a vertex unfolding, in which the cuts are along edges but the unfolding only needs to be connected at vertices [10]. On the other hand, experimental results suggest that a random edge cutting of ¤Xerox Palo Alto Research Center, 3333 Coyote Hill Rd., Palo Alto, CA 94304, USA, email: [email protected]. -
Mathematics of Origami
Mathematics of Origami Angela Kohlhaas Loras College February 17, 2012 Introduction Origami ori + kami, “folding paper” Tools: one uncut square of paper, mountain and valley folds Goal: create art with elegance, balance, detail Outline History Applications Foldability Design History of Origami 105 A.D.: Invention of paper in China Paper-folding begins shortly after in China, Korea, Japan 800s: Japanese develop basic models for ceremonial folding 1200s: Origami globalized throughout Japan 1682: Earliest book to describe origami 1797: How to fold 1,000 cranes published 1954: Yoshizawa’s book formalizes a notational system 1940s-1960s: Origami popularized in the U.S. and throughout the world History of Origami Mathematics 1893: Geometric exercises in paper folding by Row 1936: Origami first analyzed according to axioms by Beloch 1989-present: Huzita-Hatori axioms Flat-folding theorems: Maekawa, Kawasaki, Justin, Hull TreeMaker designed by Lang Origami sekkei – “technical origami” Rigid origami Applications from the large to very small Miura-Ori Japanese solar sail “Eyeglass” space telescope Lawrence Livermore National Laboratory Science of the small Heart stents Titanium hydride printing DNA origami Protein-folding Two broad categories Foldability (discrete, computational complexity) Given a pattern of creases, when does the folded model lie flat? Design (geometry, optimization) How much detail can added to an origami model, and how efficiently can this be done? Flat-Foldability of Crease Patterns 훗 Three criteria for 훗: Continuity, Piecewise isometry, Noncrossing 2-Colorable Under the mapping 훗, some faces are flipped while others are only translated and rotated. Maekawa-Justin Theorem At any interior vertex, the number of mountain and valley folds differ by two. -

Constructing Points Through Folding and Intersection
CONSTRUCTING POINTS THROUGH FOLDING AND INTERSECTION The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Butler, Steve, Erik Demaine, Ron Graham and Tomohiro Tachi. "Constructing points through folding and intersection." International Journal of Computational Geometry & Applications, Vol. 23 (01) 2016: 49-64. As Published 10.1142/S0218195913500039 Publisher World Scientific Pub Co Pte Lt Version Author's final manuscript Citable link https://hdl.handle.net/1721.1/121356 Terms of Use Creative Commons Attribution-Noncommercial-Share Alike Detailed Terms http://creativecommons.org/licenses/by-nc-sa/4.0/ Constructing points through folding and intersection Steve Butler∗ Erik Demaine† Ron Graham‡ Tomohiro Tachi§ Abstract Fix an n 3. Consider the following two operations: given a line with a specified point on the line we≥ can construct a new line through the point which forms an angle with the new line which is a multiple of π/n (folding); and given two lines we can construct the point where they cross (intersection). Starting with the line y = 0 and the points (0, 0) and (1, 0) we determine which points in the plane can be constructed using only these two operations for n =3, 4, 5, 6, 8, 10, 12, 24 and also consider the problem of the minimum number of steps it takes to construct such a point. 1 Introduction If an origami model is laid flat the piece of paper will retain a memory of the folds that went into the construction of the model as creases (or lines) in the paper. -
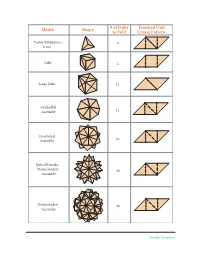
Sonobe Assembly Guide for a Few Polyhedra
Model Shape # of Units Finished Unit to Fold Crease Pattern Toshie Takahama’s 3 Jewel Cube 6 Large Cube 12 Octahedral Assembly 12 Icosahedral Assembly 30 Spiked Pentakis Dodecahedral 60 Assembly Dodecahedral 90 Assembly 2 Sonobe Variations Sonobe Assembly Basics Sonobe assemblies are essentially “pyramidized” constructing a polyhedron, the key thing to re- polyhedra, each pyramid consisting of three So- member is that the diagonal ab of each Sonobe nobe units. The figure below shows a generic So- unit will lie along an edge of the polyhedron. nobe unit and how to form one pyramid. When a Pocket Tab Forming one Tab pyramid Pocket b A generic Sonobe unit representation Sonobe Assembly Guide for a Few Polyhedra 1. Toshie’s Jewel: Crease three finished units as tabs and pockets. This assembly is also sometimes explained in the table on page 2. Form a pyramid known as a Crane Egg. as above. Then turn the assembly upside down 2. Cube Assembly: Crease six finished units as and make another pyramid with the three loose explained in the table on page 2. Each face will be made up of 3 the center square of one unit and the tabs of two other units. 4 Do Steps 1 and 2 to form one face. Do Steps 3 and 4 to form one corner or vertex. Continue 1 2 interlocking in this manner to arrive at the finished cube. Sonobe Variations 3 3. Large Cube Assembly: Crease 12 finished units as explained on page 2. 5 6 3 The 12-unit large cube is the only assembly that does not involve pyramidizing. -

Constructing Points Through Folding and Intersection
Constructing points through folding and intersection Steve Butler∗ Erik Demaine† Ron Graham‡ Tomohiro Tachi§ Abstract Fix an n 3. Consider the following two operations: given a line with a specified point on the line we≥ can construct a new line through the point which forms an angle with the new line which is a multiple of π/n (folding); and given two lines we can construct the point where they cross (intersection). Starting with the line y = 0 and the points (0, 0) and (1, 0) we determine which points in the plane can be constructed using only these two operations for n =3, 4, 5, 6, 8, 10, 12, 24 and also consider the problem of the minimum number of steps it takes to construct such a point. 1 Introduction If an origami model is laid flat the piece of paper will retain a memory of the folds that went into the construction of the model as creases (or lines) in the paper. These creases will sometimes be reflected as places in the final model where the paper is bent and sometimes will be left over artifacts from early in the construction process. These creases can also be used in the construction of reference points, which play a useful role in the design of complicated origami models (see [6]). As such, tools to help efficiently construct reference points have been developed, i.e., ReferenceFinder [7]. The problem of finding which points can be constructed using origami has been extensively studied. In particular, using the Huzita-Hatori axioms it has been shown that all quartic polyno- mials can be solved using origami (see [4, pp. -
Origami Design Secrets Reveals the Underlying Concepts of Origami and How to Create Original Origami Designs
SECOND EDITION PRAISE FOR THE FIRST EDITION “Lang chose to strike a balance between a book that describes origami design algorithmically and one that appeals to the origami community … For mathematicians and origamists alike, Lang’s expository approach introduces the reader to technical aspects of folding and the mathematical models with clarity and good humor … highly recommended for mathematicians and students alike who want to view, explore, wrestle with open problems in, or even try their own hand at the complexity of origami model design.” —Thomas C. Hull, The Mathematical Intelligencer “Nothing like this has ever been attempted before; finally, the secrets of an origami master are revealed! It feels like Lang has taken you on as an apprentice as he teaches you his techniques, stepping you through examples of real origami designs and their development.” —Erik D. Demaine, Massachusetts Institute of Technology ORIGAMI “This magisterial work, splendidly produced, covers all aspects of the art and science.” —SIAM Book Review The magnum opus of one of the world’s leading origami artists, the second DESIGN edition of Origami Design Secrets reveals the underlying concepts of origami and how to create original origami designs. Containing step-by-step instructions for 26 models, this book is not just an origami cookbook or list of instructions—it introduces SECRETS the fundamental building blocks of origami, building up to advanced methods such as the combination of uniaxial bases, the circle/river method, and tree theory. With corrections and improved Mathematical Methods illustrations, this new expanded edition also for an Ancient Art covers uniaxial box pleating, introduces the new design technique of hex pleating, and describes methods of generalizing polygon packing to arbitrary angles. -

Table of Contents
Contents Part 1: Mathematics of Origami Introduction Acknowledgments I. Mathematics of Origami: Coloring Coloring Connections with Counting Mountain-Valley Assignments Thomas C. Hull Color Symmetry Approach to the Construction of Crystallographic Flat Origami Ma. Louise Antonette N. De las Penas,˜ Eduard C. Taganap, and Teofina A. Rapanut Symmetric Colorings of Polypolyhedra sarah-marie belcastro and Thomas C. Hull II. Mathematics of Origami: Constructibility Geometric and Arithmetic Relations Concerning Origami Jordi Guardia` and Eullia Tramuns Abelian and Non-Abelian Numbers via 3D Origami Jose´ Ignacio Royo Prieto and Eulalia` Tramuns Interactive Construction and Automated Proof in Eos System with Application to Knot Fold of Regular Polygons Fadoua Ghourabi, Tetsuo Ida, and Kazuko Takahashi Equal Division on Any Polygon Side by Folding Sy Chen A Survey and Recent Results about Common Developments of Two or More Boxes Ryuhei Uehara Unfolding Simple Folds from Crease Patterns Hugo A. Akitaya, Jun Mitani, Yoshihiro Kanamori, and Yukio Fukui v vi CONTENTS III. Mathematics of Origami: Rigid Foldability Rigid Folding of Periodic Origami Tessellations Tomohiro Tachi Rigid Flattening of Polyhedra with Slits Zachary Abel, Robert Connelly, Erik D. Demaine, Martin L. Demaine, Thomas C. Hull, Anna Lubiw, and Tomohiro Tachi Rigidly Foldable Origami Twists Thomas A. Evans, Robert J. Lang, Spencer P. Magleby, and Larry L. Howell Locked Rigid Origami with Multiple Degrees of Freedom Zachary Abel, Thomas C. Hull, and Tomohiro Tachi Screw-Algebra–Based Kinematic and Static Modeling of Origami-Inspired Mechanisms Ketao Zhang, Chen Qiu, and Jian S. Dai Thick Rigidly Foldable Structures Realized by an Offset Panel Technique Bryce J. Edmondson, Robert J. -
![Arxiv:2105.14305V1 [Cs.CG] 29 May 2021](https://docslib.b-cdn.net/cover/2277/arxiv-2105-14305v1-cs-cg-29-may-2021-1052277.webp)
Arxiv:2105.14305V1 [Cs.CG] 29 May 2021
Efficient Folding Algorithms for Regular Polyhedra ∗ Tonan Kamata1 Akira Kadoguchi2 Takashi Horiyama3 Ryuhei Uehara1 1 School of Information Science, Japan Advanced Institute of Science and Technology (JAIST), Ishikawa, Japan fkamata,[email protected] 2 Intelligent Vision & Image Systems (IVIS), Tokyo, Japan [email protected] 3 Faculty of Information Science and Technology, Hokkaido University, Hokkaido, Japan [email protected] Abstract We investigate the folding problem that asks if a polygon P can be folded to a polyhedron Q for given P and Q. Recently, an efficient algorithm for this problem has been developed when Q is a box. We extend this idea to regular polyhedra, also known as Platonic solids. The basic idea of our algorithms is common, which is called stamping. However, the computational complexities of them are different depending on their geometric properties. We developed four algorithms for the problem as follows. (1) An algorithm for a regular tetrahedron, which can be extended to a tetramonohedron. (2) An algorithm for a regular hexahedron (or a cube), which is much efficient than the previously known one. (3) An algorithm for a general deltahedron, which contains the cases that Q is a regular octahedron or a regular icosahedron. (4) An algorithm for a regular dodecahedron. Combining these algorithms, we can conclude that the folding problem can be solved pseudo-polynomial time when Q is a regular polyhedron and other related solid. Keywords: Computational origami folding problem pseudo-polynomial time algorithm regular poly- hedron (Platonic solids) stamping 1 Introduction In 1525, the German painter Albrecht D¨urerpublished his masterwork on geometry [5], whose title translates as \On Teaching Measurement with a Compass and Straightedge for lines, planes, and whole bodies." In the book, he presented each polyhedron by drawing a net, which is an unfolding of the surface of the polyhedron to a planar layout without overlapping by cutting along its edges. -

The Miura-Ori Opened out Like a Fan INTERNATIONAL SOCIETY for the INTERDISCIPLINARY STUDY of SYMMETRY (ISIS-SYMMETRY)
The Quarterly of the Editors: International Society for the GyiSrgy Darvas and D~nes Nag¥ interdisciplinary Study of Symmetry (ISIS-Symmetry) Volume 5, Number 2, 1994 The Miura-ori opened out like a fan INTERNATIONAL SOCIETY FOR THE INTERDISCIPLINARY STUDY OF SYMMETRY (ISIS-SYMMETRY) President ASIA D~nes Nagy, lnslltute of Apphed Physics, University of China. t~R. Da-Fu Ding, Shangha~ Institute of Biochemistry. Tsukuba, Tsukuba Soence C~ty 305, Japan Academia Stoma, 320 Yue-Yang Road, (on leave from Eotvos Lot’find Umve~ty, Budapest, Hungary) Shanghai 200031, PR China IGeometry and Crystallography, H~story of Science and [Theoreucal B~ology] Tecbnology, Lmgmsucs] Le~Xiao Yu, Department of Fine Arts. Nanjmg Normal Umvers~ty, Nanjmg 210024, P.R China Honorary Presidents }Free Art, Folk Art, Calhgraphy] Konstantin V. Frolov (Moscow) and lndta. Kirti Trivedi, Industrial Design Cenlre, lndmn Maval Ne’eman (TeI-Avw) Institute of Technology, Powa~, Bombay 400076, India lDes~gn, lndmn Art] Vice-President Israel. Hanan Bruen, School of Education, Arthur L. Loeb, Carpenter Center for the V~sual Arts, Umvers~ty of Hallo, Mount Carmel, Haffa 31999, Israel Harvard Umverslty. Cambridge, MA 02138, [Educanon] U S A. [Crystallography, Chemical Physics, Visual Art~, Jim Rosen, School of Physics and Astronomy, Choreography, Music} TeI-Av~v Umvers~ty, Ramat-Avtv, Tel-Av~v 69978. Israel and [Theoretical Physms] Sergei V Petukhov, Instnut mashmovedemya RAN (Mechamcal Engineering Research Institute, Russian, Japan. Yasushi Kajfl~awa, Synergel~cs Institute. Academy of Scmnces 101830 Moskva, ul Griboedova 4, Russia (also Head of the Russian Branch Office of the Society) 206 Nakammurahara, Odawara 256, Japan }Design, Geometry] }B~omechanlcs, B~ontcs, Informauon Mechamcs] Koichtro Mat~uno, Department of BioEngineering. -

GEOMETRIC FOLDING ALGORITHMS I
P1: FYX/FYX P2: FYX 0521857570pre CUNY758/Demaine 0 521 81095 7 February 25, 2007 7:5 GEOMETRIC FOLDING ALGORITHMS Folding and unfolding problems have been implicit since Albrecht Dürer in the early 1500s but have only recently been studied in the mathemat- ical literature. Over the past decade, there has been a surge of interest in these problems, with applications ranging from robotics to protein folding. With an emphasis on algorithmic or computational aspects, this comprehensive treatment of the geometry of folding and unfolding presents hundreds of results and more than 60 unsolved “open prob- lems” to spur further research. The authors cover one-dimensional (1D) objects (linkages), 2D objects (paper), and 3D objects (polyhedra). Among the results in Part I is that there is a planar linkage that can trace out any algebraic curve, even “sign your name.” Part II features the “fold-and-cut” algorithm, establishing that any straight-line drawing on paper can be folded so that the com- plete drawing can be cut out with one straight scissors cut. In Part III, readers will see that the “Latin cross” unfolding of a cube can be refolded to 23 different convex polyhedra. Aimed primarily at advanced undergraduate and graduate students in mathematics or computer science, this lavishly illustrated book will fascinate a broad audience, from high school students to researchers. Erik D. Demaine is the Esther and Harold E. Edgerton Professor of Elec- trical Engineering and Computer Science at the Massachusetts Institute of Technology, where he joined the faculty in 2001. He is the recipient of several awards, including a MacArthur Fellowship, a Sloan Fellowship, the Harold E. -

Universal Folding Pathways of Polyhedron Nets
Universal folding pathways of polyhedron nets Paul M. Dodda, Pablo F. Damascenob, and Sharon C. Glotzera,b,c,d,1 aChemical Engineering Department, University of Michigan, Ann Arbor, MI 48109; bApplied Physics Program, University of Michigan, Ann Arbor, MI 48109; cDepartment of Materials Science and Engineering, University of Michigan, Ann Arbor, MI 48109; and dBiointerfaces Institute, University of Michigan, Ann Arbor, MI 48109 Contributed by Sharon C. Glotzer, June 6, 2018 (sent for review January 17, 2018; reviewed by Nuno Araujo and Andrew L. Ferguson) Low-dimensional objects such as molecular strands, ladders, and navigate, thermodynamically, from a denatured (unfolded) state sheets have intrinsic features that affect their propensity to fold to a natured (folded) one. Even after many decades of study, into 3D objects. Understanding this relationship remains a chal- however, a universal relationship between molecular sequence lenge for de novo design of functional structures. Using molecular and folded state—which could provide crucial insight into the dynamics simulations, we investigate the refolding of the 24 causes and potential treatments of many diseases—remains out possible 2D unfoldings (“nets”) of the three simplest Platonic of reach (11–13). shapes and demonstrate that attributes of a net’s topology— In this work, we study the thermodynamic foldability of 2D net compactness and leaves on the cutting graph—correlate nets for all five Platonic solids. Despite being the simplest and with thermodynamic folding propensity. To -

© Cambridge University Press Cambridge
Cambridge University Press 978-0-521-85757-4 - Geometric Folding Algorithms: Linkages, Origami, Polyhedra Erik D. Demaine and Joseph O’Rourke Index More information Index 1-skeleton, 311, 339 bar, 9 3-Satisfiability, 217, 221 base, see origami, base, 2 α-cone canonical configuration, 151, 152 Bauhaus, 294 α-producible chain, 150, 151 Bellows theorem, 279, 348 δ-perturbation, 115 bending λ order function, 176, 177, 186 machine, xi, 13, 306 antisymmetry condition, 177, 186 pipe, 13, 14 consistency condition, 178, 186 sheet metal, 306 noncrossing condition, 179, 186 beta sheet, 158 time continuity, 174, 183, 187 Bezdek, Daniel, 331 transitivity condition, 178, 186 blooming, continuous, 333, 435 bond angle, 14, 131, 148, 151 Abe’s angle trisection, 286, 287 bond length, 148 accordion, 85, 193, 200, 261 active path, 244, 245, 247–249 cable, 53–55 acyclicity, 108 CAD, see cylindrical algebraic decomposition, 19 additor (Kempe), 32, 34, 35 cage, 21, 92, 93 Alexandrov, Aleksandr D., 348 canonical form, 74, 86, 87, 141, 151 Alexandrov’s theorem, 339, 348, 349, 352, 354, Cauchy’s arm lemma, 72, 133, 143, 145, 342, 343, 368, 381, 393, 419 377 existence, 351 Cauchy’s rigidity theorem, 43, 143, 213, 279, 339, uniqueness, 350 341, 342, 345, 348–350, 354, 403 algebraic motion, 107, 111 Cauchy—Steinitz lemma, 72, 342 algebraic set, 39, 44 chain algebraic variety, 27 4D, 92, 93, 437 alpha helix, 151, 157, 158 abstract, 65, 149, 153, 158 Amato, Nancy, 157 convex, 143, 145 amino acid, 158 cutting, xi, 91, 123 amino acid residue, 14, 148, 151 equilateral, see