Symmetry Groups of Platonic Solids
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

In Order for the Figure to Map Onto Itself, the Line of Reflection Must Go Through the Center Point
3-5 Symmetry State whether the figure appears to have line symmetry. Write yes or no. If so, copy the figure, draw all lines of symmetry, and state their number. 1. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The figure has reflectional symmetry. In order for the figure to map onto itself, the line of reflection must go through the center point. Two lines of reflection go through the sides of the figure. Two lines of reflection go through the vertices of the figure. Thus, there are four possible lines that go through the center and are lines of reflections. Therefore, the figure has four lines of symmetry. eSolutionsANSWER: Manual - Powered by Cognero Page 1 yes; 4 2. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure does not have reflectional symmetry. There is no way to fold or reflect it onto itself. ANSWER: no 3. SOLUTION: A figure has reflectional symmetry if the figure can be mapped onto itself by a reflection in a line. The given figure has reflectional symmetry. The figure has a vertical line of symmetry. It does not have a horizontal line of symmetry. The figure does not have a line of symmetry through the vertices. Thus, the figure has only one line of symmetry. ANSWER: yes; 1 State whether the figure has rotational symmetry. Write yes or no. If so, copy the figure, locate the center of symmetry, and state the order and magnitude of symmetry. -

Simple Closed Geodesics on Regular Tetrahedra in Lobachevsky Space
Simple closed geodesics on regular tetrahedra in Lobachevsky space Alexander A. Borisenko, Darya D. Sukhorebska Abstract. We obtained a complete classification of simple closed geodesics on regular tetrahedra in Lobachevsky space. Also, we evaluated the number of simple closed geodesics of length not greater than L and found the asymptotic of this number as L goes to infinity. Keywords: closed geodesics, simple geodesics, regular tetrahedron, Lobachevsky space, hyperbolic space. MSC: 53С22, 52B10 1 Introduction A closed geodesic is called simple if this geodesic is not self-intersecting and does not go along itself. In 1905 Poincare proposed the conjecture on the existence of three simple closed geodesics on a smooth convex surface in three-dimensional Euclidean space. In 1917 J. Birkhoff proved that there exists at least one simple closed geodesic on a Riemannian manifold that is home- omorphic to a sphere of arbitrary dimension [1]. In 1929 L. Lyusternik and L. Shnirelman obtained that there exist at least three simple closed geodesics on a compact simply-connected two-dimensional Riemannian manifold [2], [3]. But the proof by Lyusternik and Shnirelman contains substantial gaps. I. A. Taimanov gives a complete proof of the theorem that on each smooth Riemannian manifold homeomorphic to the two-dimentional sphere there exist at least three distinct simple closed geodesics [4]. In 1951 L. Lyusternik and A. Fet stated that there exists at least one closed geodesic on any compact Riemannian manifold [5]. In 1965 Fet improved this results. He proved that there exist at least two closed geodesics on a compact Riemannian manifold under the assumption that all closed geodesics are non-degenerate [6]. -

The Cubic Groups
The Cubic Groups Baccalaureate Thesis in Electrical Engineering Author: Supervisor: Sana Zunic Dr. Wolfgang Herfort 0627758 Vienna University of Technology May 13, 2010 Contents 1 Concepts from Algebra 4 1.1 Groups . 4 1.2 Subgroups . 4 1.3 Actions . 5 2 Concepts from Crystallography 6 2.1 Space Groups and their Classification . 6 2.2 Motions in R3 ............................. 8 2.3 Cubic Lattices . 9 2.4 Space Groups with a Cubic Lattice . 10 3 The Octahedral Symmetry Groups 11 3.1 The Elements of O and Oh ..................... 11 3.2 A Presentation of Oh ......................... 14 3.3 The Subgroups of Oh ......................... 14 2 Abstract After introducing basics from (mathematical) crystallography we turn to the description of the octahedral symmetry groups { the symmetry group(s) of a cube. Preface The intention of this account is to provide a description of the octahedral sym- metry groups { symmetry group(s) of the cube. We first give the basic idea (without proofs) of mathematical crystallography, namely that the 219 space groups correspond to the 7 crystal systems. After this we come to describing cubic lattices { such ones that are built from \cubic cells". Finally, among the cubic lattices, we discuss briefly the ones on which O and Oh act. After this we provide lists of the elements and the subgroups of Oh. A presentation of Oh in terms of generators and relations { using the Dynkin diagram B3 is also given. It is our hope that this account is accessible to both { the mathematician and the engineer. The picture on the title page reflects Ha¨uy'sidea of crystal structure [4]. -
Geometry Without Points
GEOMETRY WITHOUT POINTS Dana S. Scott, FBA, FNAS University Professor Emeritus Carnegie Mellon University Visiting Scholar University of California, Berkeley This is a preliminary report on on-going joint work with Tamar Lando, Philosophy, Columbia University !1 Euclid’s Definitions • A point is that which has no part. • A line is breadthless length. • A surface is that which has length and breadth only. The Basic Questions • Are these notions too abstract ? Or too idealized ? • Can we develop a theory of regions without using points ? • Does it make sense for geometric objects to be only solids ? !2 Famous Proponents of Pointlessness Gottfried Wilhelm von Leibniz (1646 – 1716) Nikolai Lobachevsky (1792 – 1856) Edmund Husserl (1859 – 1938) Alfred North Whitehead (1861 – 1947) Johannes Trolle Hjelmslev (1873 – 1950) Edward Vermilye Huntington (1874 – 1952) Theodore de Laguna (1876 – 1930) Stanisław Leśniewski (1886 – 1939) Jean George Pierre Nicod (1893 – 1924) Leonard Mascot Blumenthal (1901 – 1984) Alfred Tarski (1901 – 1983) Karl Menger (1902 – 1985) John von Neumann (1903 – 1957) Henry S. Leonard (1905 – 1967) Nelson Goodman (1906 – 1998) !3 Two Quotations Mathematics is a part of physics. Physics is an experimental science, a part of natural science. Mathematics is the part of physics where experiments are cheap. -- V.I. Arnol’d, in a lecture, Paris, March 1997 I remember once when I tried to add a little seasoning to a review, but I wasn't allowed to. The paper was by Dorothy Maharam, and it was a perfectly sound contribution to abstract measure theory. The domains of the underlying measures were not sets but elements of more general Boolean algebras, and their range consisted not of positive numbers but of certain abstract equivalence classes. -

Draft Framework for a Teaching Unit: Transformations
Co-funded by the European Union PRIMARY TEACHER EDUCATION (PrimTEd) PROJECT GEOMETRY AND MEASUREMENT WORKING GROUP DRAFT FRAMEWORK FOR A TEACHING UNIT Preamble The general aim of this teaching unit is to empower pre-service students by exposing them to geometry and measurement, and the relevant pe dagogical content that would allow them to become skilful and competent mathematics teachers. The depth and scope of the content often go beyond what is required by prescribed school curricula for the Intermediate Phase learners, but should allow pre- service teachers to be well equipped, and approach the teaching of Geometry and Measurement with confidence. Pre-service teachers should essentially be prepared for Intermediate Phase teaching according to the requirements set out in MRTEQ (Minimum Requirements for Teacher Education Qualifications, 2019). “MRTEQ provides a basis for the construction of core curricula Initial Teacher Education (ITE) as well as for Continuing Professional Development (CPD) Programmes that accredited institutions must use in order to develop programmes leading to teacher education qualifications.” [p6]. Competent learning… a mixture of Theoretical & Pure & Extrinsic & Potential & Competent learning represents the acquisition, integration & application of different types of knowledge. Each type implies the mastering of specific related skills Disciplinary Subject matter knowledge & specific specialized subject Pedagogical Knowledge of learners, learning, curriculum & general instructional & assessment strategies & specialized Learning in & from practice – the study of practice using Practical learning case studies, videos & lesson observations to theorize practice & form basis for learning in practice – authentic & simulated classroom environments, i.e. Work-integrated Fundamental Learning to converse in a second official language (LOTL), ability to use ICT & acquisition of academic literacies Knowledge of varied learning situations, contexts & Situational environments of education – classrooms, schools, communities, etc. -

Chapter 1 – Symmetry of Molecules – P. 1
Chapter 1 – Symmetry of Molecules – p. 1 - 1. Symmetry of Molecules 1.1 Symmetry Elements · Symmetry operation: Operation that transforms a molecule to an equivalent position and orientation, i.e. after the operation every point of the molecule is coincident with an equivalent point. · Symmetry element: Geometrical entity (line, plane or point) which respect to which one or more symmetry operations can be carried out. In molecules there are only four types of symmetry elements or operations: · Mirror planes: reflection with respect to plane; notation: s · Center of inversion: inversion of all atom positions with respect to inversion center, notation i · Proper axis: Rotation by 2p/n with respect to the axis, notation Cn · Improper axis: Rotation by 2p/n with respect to the axis, followed by reflection with respect to plane, perpendicular to axis, notation Sn Formally, this classification can be further simplified by expressing the inversion i as an improper rotation S2 and the reflection s as an improper rotation S1. Thus, the only symmetry elements in molecules are Cn and Sn. Important: Successive execution of two symmetry operation corresponds to another symmetry operation of the molecule. In order to make this statement a general rule, we require one more symmetry operation, the identity E. (1.1: Symmetry elements in CH4, successive execution of symmetry operations) 1.2. Systematic classification by symmetry groups According to their inherent symmetry elements, molecules can be classified systematically in so called symmetry groups. We use the so-called Schönfliess notation to name the groups, Chapter 1 – Symmetry of Molecules – p. 2 - which is the usual notation for molecules. -
Hands-On Explorations of Plane Transformations
Hands-On Explorations of Plane Transformations James King University of Washington Department of Mathematics [email protected] http://www.math.washington.edu/~king The “Plan” • In this session, we will explore exploring. • We have a big math toolkit of transformations to think about. • We have some physical objects that can serve as a hands- on toolkit. • We have geometry relationships to think about. • So we will try out at many combinations as we can to get an idea of how they work out as a real-world experience. • I expect that we will get some new ideas from each other as we try out different tools for various purposes. Our Transformational Case of Characters • Line Reflection • Point Reflection (a rotation) • Translation • Rotation • Dilation • Compositions of any of the above Our Physical Toolkit • Patty paper • Semi-reflective plastic mirrors • Graph paper • Ruled paper • Card Stock • Dot paper • Scissors, rulers, protractors Reflecting a point • As a first task, we will try out tools for line reflection of a point A to a point B. Then reflecting a shape. A • Suggest that you try the semi-reflective mirrors and the patty paper for folding and tracing. Also, graph paper is an option. Also, regular paper and cut-outs M • Note that pencils and overhead pens work on patty paper but not ballpoints. Also not that overhead dots are easier to see with the mirrors. B • Can we (or your students) conclude from your C tool that the mirror line is the perpendicular bisector of AB? Which tools best let you draw this reflection? • When reflecting shapes, consider how to reflect some polygon when it is not all on one side of the mirror line. -

Pose Estimation for Objects with Rotational Symmetry
Pose Estimation for Objects with Rotational Symmetry Enric Corona, Kaustav Kundu, Sanja Fidler Abstract— Pose estimation is a widely explored problem, enabling many robotic tasks such as grasping and manipulation. In this paper, we tackle the problem of pose estimation for objects that exhibit rotational symmetry, which are common in man-made and industrial environments. In particular, our aim is to infer poses for objects not seen at training time, but for which their 3D CAD models are available at test time. Previous X 2 X 1 X 2 X 1 work has tackled this problem by learning to compare captured Y ∼ 2 Y ∼ 2 Y ∼ 2 Y ∼ 2 views of real objects with the rendered views of their 3D CAD Z ∼ 6 Z ∼ 1 Z ∼ Z ∼ 1 ∼ ∼ ∼ ∞ ∼ models, by embedding them in a joint latent space using neural Fig. 1. Many industrial objects such as various tools exhibit rotational networks. We show that sidestepping the issue of symmetry symmetries. In our work, we address pose estimation for such objects. in this scenario during training leads to poor performance at test time. We propose a model that reasons about rotational symmetry during training by having access to only a small set of that this is not a trivial task, as the rendered views may look symmetry-labeled objects, whereby exploiting a large collection very different from objects in real images, both because of of unlabeled CAD models. We demonstrate that our approach different background, lighting, and possible occlusion that significantly outperforms a naively trained neural network on arise in real scenes. -
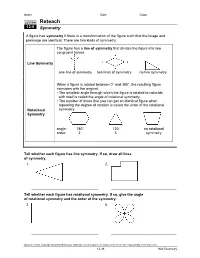
12-5 Worksheet Part C
Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry A figure has symmetry if there is a transformation of the figure such that the image and preimage are identical. There are two kinds of symmetry. The figure has a line of symmetry that divides the figure into two congruent halves. Line Symmetry one line of symmetry two lines of symmetry no line symmetry When a figure is rotated between 0° and 360°, the resulting figure coincides with the original. • The smallest angle through which the figure is rotated to coincide with itself is called the angle of rotational symmetry. • The number of times that you can get an identical figure when repeating the degree of rotation is called the order of the rotational Rotational symmetry. Symmetry angle: 180° 120° no rotational order: 2 3 symmetry Tell whether each figure has line symmetry. If so, draw all lines of symmetry. 1. 2. _________________________________________ ________________________________________ Tell whether each figure has rotational symmetry. If so, give the angle of rotational symmetry and the order of the symmetry. 3. 4. _________________________________________ ________________________________________ Original content Copyright © by Holt McDougal. Additions and changes to the original content are the responsibility of the instructor. 12-38 Holt Geometry Name ________________________________________ Date __________________ Class__________________ LESSON Reteach 12-5 Symmetry continued Three-dimensional figures can also have symmetry. Symmetry in Three Description Example Dimensions A plane can divide a figure into two Plane Symmetry congruent halves. There is a line about which a figure Symmetry About can be rotated so that the image and an Axis preimage are identical. -
Symmetry and Groups, and Crystal Structures
CHAPTER 3: SYMMETRY AND GROUPS, AND CRYSTAL STRUCTURES Sarah Lambart RECAP CHAP. 2 2 different types of close packing: hcp: tetrahedral interstice (ABABA) ccp: octahedral interstice (ABCABC) Definitions: The coordination number or CN is the number of closest neighbors of opposite charge around an ion. It can range from 2 to 12 in ionic structures. These structures are called coordination polyhedron. RECAP CHAP. 2 Rx/Rz C.N. Type Hexagonal or An ideal close-packing of sphere 1.0 12 Cubic for a given CN, can only be Closest Packing achieved for a specific ratio of 1.0 - 0.732 8 Cubic ionic radii between the anions and 0.732 - 0.414 6 Octahedral Tetrahedral (ex.: the cations. 0.414 - 0.225 4 4- SiO4 ) 0.225 - 0.155 3 Triangular <0.155 2 Linear RECAP CHAP. 2 Pauling’s rule: #1: the coodination polyhedron is defined by the ratio Rcation/Ranion #2: The Electrostatic Valency (e.v.) Principle: ev = Z/CN #3: Shared edges and faces of coordination polyhedra decreases the stability of the crystal. #4: In crystal with different cations, those of high valency and small CN tend not to share polyhedral elements #5: The principle of parsimony: The number of different sites in a crystal tends to be small. CONTENT CHAP. 3 (2-3 LECTURES) Definitions: unit cell and lattice 7 Crystal systems 14 Bravais lattices Element of symmetry CRYSTAL LATTICE IN TWO DIMENSIONS A crystal consists of atoms, molecules, or ions in a pattern that repeats in three dimensions. The geometry of the repeating pattern of a crystal can be described in terms of a crystal lattice, constructed by connecting equivalent points throughout the crystal. -

Rigid Motion – a Transformation That Preserves Distance and Angle Measure (The Shapes Are Congruent, Angles Are Congruent)
REVIEW OF TRANSFORMATIONS GEOMETRY Rigid motion – A transformation that preserves distance and angle measure (the shapes are congruent, angles are congruent). Isometry – A transformation that preserves distance (the shapes are congruent). Direct Isometry – A transformation that preserves orientation, the order of the lettering (ABCD) in the figure and the image are the same, either both clockwise or both counterclockwise (the shapes are congruent). Opposite Isometry – A transformation that DOES NOT preserve orientation, the order of the lettering (ABCD) is reversed, either clockwise or counterclockwise becomes clockwise (the shapes are congruent). Composition of transformations – is a combination of 2 or more transformations. In a composition, you perform each transformation on the image of the preceding transformation. Example: rRx axis O,180 , the little circle tells us that this is a composition of transformations, we also execute the transformations from right to left (backwards). If you would like a visual of this information or if you would like to quiz yourself, go to http://www.mathsisfun.com/geometry/transformations.html. Line Reflection Point Reflection Translations (Shift) Rotations (Turn) Glide Reflection Dilations (Multiply) Rigid Motion Rigid Motion Rigid Motion Rigid Motion Rigid Motion Not a rigid motion Opposite isometry Direct isometry Direct isometry Direct isometry Opposite isometry NOT an isometry Reverse orientation Same orientation Same orientation Same orientation Reverse orientation Same orientation Properties preserved: Properties preserved: Properties preserved: Properties preserved: Properties preserved: Properties preserved: 1. Distance 1. Distance 1. Distance 1. Distance 1. Distance 1. Angle measure 2. Angle measure 2. Angle measure 2. Angle measure 2. Angle measure 2. Angle measure 2. -

Math 203 Lecture 12 Notes: Tessellation – a Complete Covering
Math 103 Lecture #12 class notes page 1 Math 203 Lecture 12 notes: Note: this lecture is very “visual,” i.e., lots of pictures illustrating tessellation concepts Tessellation – a complete covering of a plane by one or more figures in a repeating pattern, with no overlapping. There are only 3 regular polygons that can tessellate a plane without being combined with other polygons: 1) equilateral triangle 2)square 3) regular hexagon. Once a basic design has been constructed, it may be extended through 3 different transformations: translation (slide), rotation (turn), or reflection (flip). FLIP: A figure has line symmetry if there is a line of reflection such that each point in the figure can be reflected into the figure. Line symmetry is sometimes referred to as mirror symmetry, axial, symmetry, bilateral symmetry, or reflective symmetry. The line of symmetry may be vertical, horizontal, or slanted. A figure may have one or more lines of symmetry, or none. Regular polygons with n sides have n lines of symmetry. Any line through the center of a circle is a line of symmetry for a circle. The circle is the most symmetric of all plane figures. The musical counterpart of horizontal reflection (across the y-axis) is called retrogression, while vertical reflection (across the x-axis) is called inversion. SLIDE: Translation (or slide translation) is one in which a figure moves without changing size or shape. It can be thought of as a motion that moves the figure from one location in a plane to another. The distance that the figure moves, or slides, is called the magnitude.