Mcnearney, Eugene Master's Thesis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Voltage Doubler Circuit with 555 Timer
VOLTAGE DOUBLER CIRCUIT WITH 555 TIMER A Project report submitted in partial fulfilment of the requirements for the degree of B. Tech in Electrical Engineering By ASHFAQUE ARSHAD (11701614014) AKSHAY KUMAR (11701614005) DEBAYAN MANNA (11701614019) SURESH SAHU (11701614056) Under the supervision of MR. SUBHASIS BANERJEE Assistant Professor, Electrical Engineering, RCCIIT Department of Electrical Engineering RCC INSTITUTE OF INFORMATION TECHNOLOGY CANAL SOUTH ROAD, BELIAGHATA, KOLKATA – 700015, WEST BENGAL Maulana Abul Kalam Azad University of Technology (MAKAUT) © 2018 1 ACKNOWLEDGEMENT It is my great fortune that I have got opportunity to carry out this project work under the supervision of (Voltage Doubler Circuit with 555 Timer Circuit under the supervision of Mr. Subhasis Banerjee) in the Department of Electrical Engineering, RCC Institute of Information Technology (RCCIIT), Canal South Road, Beliaghata, Kolkata-700015, affiliated to Maulana Abul Kalam Azad University of Technology (MAKAUT), West Bengal, India. I express my sincere thanks and deepest sense of gratitude to my guide for his constant support, unparalleled guidance and limitless encouragement. I wish to convey my gratitude to Prof. (Dr.) Alok Kole, HOD, Department of Electrical Engineering, RCCIIT and to the authority of RCCIIT for providing all kinds of infrastructural facility towards the research work. I would also like to convey my gratitude to all the faculty members and staffs of the Department of Electrical Engineering, RCCIIT for their whole hearted cooperation -

Zero-Voltage Switching Flyback-Boost Converter with Voltage-Doubler Rectifier for High Step-Up Applications
Zero-Voltage Switching Flyback-Boost Converter with Voltage-Doubler Rectifier for High Step-up Applications Hyun-Wook Seong, Hyoung-Suk Kim, Ki-Bum Park, Gun-Woo Moon, and Myung-Joong Youn Department of Electrical Engineering, KAIST 373-1 Guseong-dong, Yuseong-gu, Daegeon, Republic of Korea, 305-701 [email protected] Abstract -- A zero-voltage switching (ZVS) flyback-boost (FB) output rectifier produces the high voltage spike. Thus, the converter with a voltage-doubler rectifier (VDR) has been snubber network is required across the output rectifier, which proposed. By combining the common part between a flyback results in a degraded efficiency. converter and a boost converter as a parallel-input/series-output As an attractive solution over aforementioned topologies, (PISO) configuration, this proposed circuit can increase a step- up ratio and clamp the surge voltage of switches. The secondary the flyback-boost (FB) converter was proposed as shown in VDR provides a further extended step-up ratio as well as its Fig. 1 [5], [6]. It can achieve a higher step-up ratio due to voltage stress to be clamped. An auxiliary switch instead of a both a transformer and a parallel-input/series-output (PISO) boost diode enables all switches to be turned on under ZVS configuration. Since the voltage spike across the switch is conditions. The zero-current turn-off of the secondary VDR limited to the output voltage of the boost converter, no alleviates its reverse-recovery losses. The operation principles, protection circuit is required. Furthermore, since the energy the theoretical analysis, and the design consideration are investigated. -

DESIGN and SIMULATION of a HIGH PERFORMANCE CMOS VOLTAGE DOUBLERS USING CHARGE REUSE TECHNIQUE 1. Introduction
Journal of Engineering Science and Technology Vol. 12, No. 12 (2017) 3344 - 3357 © School of Engineering, Taylor’s University DESIGN AND SIMULATION OF A HIGH PERFORMANCE CMOS VOLTAGE DOUBLERS USING CHARGE REUSE TECHNIQUE SHAMIL H. HUSSEIN Dept. of Electrical Engineering, College of Engineering, University of Mosul, Mosul, Iraq E-mail: [email protected] Abstract Voltage doubler (VD) structure plays an important role in charge pump (CP) circuits. It provides a voltages that is higher than the voltage of the power supply or a voltage of reverse polarity. In many applications such as the power IC and switched-capacitor transformers. This paper presents the design and analysis for VD using charge reuse technique CMOS 0.35µm tech. with high performance. Bootstrapped and charge reuse techniques is used to improve performance of integrated VD. Charge reusing method is based on equalizing the voltages of the pumping capacitances in each stage of CP. As a consequence, it reduces the load independent losses, improve the efficiency. Simulation using Orcad is applied for various VD structures shows improvement in charge reuse technique compared with existing counterpart. The results obtained show that the VD can be used in a wide band frequencies (0-100 MHz) or greater. The charge reuse VD circuit provided a good efficiency about (87.6%) and (83.5%) for one stage and two stage respectively at pump capacitance of 57pf, load current of 1mA, frequency of 10 MHz and supply voltage is 3.5 V compared with one stage and two stage of a latched VD are (85.4%) and (80%) respectively. -

HIGH VOLTAGE DC up to 2 KV from AC by USING CAPACITORS and DIODES in LADDER NETWORK Mr
[Prasad * et al., 5(6): June, 2018] ISSN: 2349-5197 Impact Factor: 3.765 INTERNATIONAL JOURNAL OF RESEARCH SCIENCE & MANAGEMENT HIGH VOLTAGE DC UP TO 2 KV FROM AC BY USING CAPACITORS AND DIODES IN LADDER NETWORK Mr. A. Raghavendra Prasad, Mr.K.Rajasekhara Reddy & Mr.M.Siva sankar Asst. Prof., Santhiram Engineering college, Nandyal Asst. Prof., Santhiram Engineering college, Nandyal Asst. Prof., Santhiram Engineering college, Nandyal DOI: 10.5281/zenodo.1291902 Abstract The aim of this project is designed to develop a high voltage DC around 2KV from a supply source of 230V AC using the capacitors and diodes in a ladder network based on voltage multiplier concept. The method for stepping up the voltage is commonly done by a step-up transformer. The output of the secondary of the step up transformer increases the voltage and decreases the current. The other method for stepping up the voltage is a voltage multiplier but from AC to DC. Voltage multipliers are primarily used to develop high voltages where low current is required. This project describes the concept to develop high voltage DC (even till 10KV output and beyond) from a single phase AC. For safety reasons our project restricts the multiplication factor to 8 such that the output would be within 2KV. This concept of generation is used in electronic appliances like the CRT’s, TV Picture tubes, oscilloscope and also used in industrial applications. The design of the circuit involves voltage multiplier, whose principle is to go on doubling the voltage for each stage. Thus, the output from an 8 stage voltage multiplier can generate up to 2KV. -

A Review of Charge Pump Topologies for the Power Management of Iot Nodes
electronics Review A Review of Charge Pump Topologies for the Power Management of IoT Nodes Andrea Ballo , Alfio Dario Grasso * and Gaetano Palumbo Dipartimento di Ingegneria Elettrica Elettronica e Informatica (DIEEI), University of Catania, I-95125 Catania, Italy; [email protected] (A.B.); [email protected] (G.P.) * Correspondence: [email protected]; Tel.: +39-095-738-2317 Received: 11 April 2019; Accepted: 24 April 2019; Published: 29 April 2019 Abstract: With the aim of providing designer guidelines for choosing the most suitable solution, according to the given design specifications, in this paper a review of charge pump (CP) topologies for the power management of Internet of Things (IoT) nodes is presented. Power management of IoT nodes represents a challenging task, especially when the output of the energy harvester is in the order of few hundreds of millivolts. In these applications, the power management section can be profitably implemented, exploiting CPs. Indeed, presently, many different CP topologies have been presented in literature. Finally, a data-driven comparison is also provided, allowing for quantitative insight into the state-of-the-art of integrated CPs. Keywords: charge pump (CP); Dickson charge pump; energy harvesting; IoT node; power management; switched-capacitors boost converter 1. Introduction The Internet of Things (IoT) paradigm is expected to have a pervasive impact in the next years. The ubiquitous character of IoT nodes implies that they must be untethered and energy autonomous. In IoT nodes, power-autonomy is achieved by scavenging energy from the ambient using transducers, such as photovoltaic (PV) cells, thermoelectric generators (TEG), and vibration sensors [1–4]. -

Ersätt Denna Text Med En Kort, Beskrivande Och Helst
Comparison between Active and Passive AC-DC Converters For Low Power Electromagnetic Self-Powering Systems A theoretical and experimental study of low power AC-DC converters Ibrahim Hamed Main field of study: Electronics Credits: 15 HP Semester/Year: Spring, 2020 Supervisor: Sebastian Bader Examiner: Jan Lundgren Course code/registration number: ET107G Degree programme: Master of Science in Engineering: Electrical Engineering 2020-06-15 Abstract Electromagnetic based energy harvesting systems such as Variable reluctance energy harvesting systems (VREH) have shown to be an effective way of extracting the energy of rotating parts. The transducer can provide enough power to run an electronic sensing system, but the problem arises in finding an efficient way of rectifying that power to generate a stable energy supply to run a system, which this report will investigate. Active and passive voltage doublers have proven to be a suitable candidate in solving this issue due to the simplicity and the small footprint. This thesis will aim to compare active and passive voltage doublers under various scenarios in order to understand under which circumstances are active or passive voltage doublers to be preferred. From the conducted experimental measurements, this thesis concluded that active voltage doublers are recommended during high RPMs (>10 RPM) while passive voltage doublers (especially full-wave voltage doubler) is recommended at lower RPMs. Quality of power also plays a significant role in this study. Therefore, measurements have also been done for ripple and rise time. From the measurements, this thesis can conclude that the overall power quality was the best in Full-wave voltage doublers, while Active- voltage doublers had lower ripple than FWVDs at higher current loads. -
Power Factor Correction (PFC) Circuits Application Note
Power Factor Correction (PFC) Circuits Application Note Power Factor Correction (PFC) Circuits Outline A power factor correction (PFC) circuit is added to a power supply circuit to bring its power factor close to 1.0 or reduce harmonics. This application note discusses the basic topologies of the PFC circuits and their operations. There are three PFC techniques: 1) passive (static) PFC using a reactor; 2) switching (active) PFC that controls a current at high frequency using a switching device; and 3) partial-switching PFC that switches on and off a switching device to control the current a few times per mains cycle and whose applications are restricted. To reduce the size and improve the efficiency of power supplies, switching PFC circuits in various topologies have appeared, including interleaved and bridgeless PFC. © 2019 1 2019-11-06 Toshiba Electronic Devices & Storage Corporation Power Factor Correction (PFC) Circuits Application Note Table of Contains Outline ............................................................................................................................................... 1 Table of Contains ................................................................................................................................ 2 1. What are a power factor and power factor correction? .......................................................... 4 1.1. Power factors for different types of loads ............................................................................................ 4 1.2. Causes of a decrease -

Novel High-Efficiency High Step-Up DC–DC Converter with Soft
processes Article Novel High-Efficiency High Step-Up DC–DC Converter with Soft Switching and Low Component Voltage Stress for Photovoltaic System Yu-En Wu * and Jyun-Wei Wang Department of Electronic Engineering, National Kaohsiung University of Science and Technology, Kaohsiung 824, Taiwan; [email protected] * Correspondence: [email protected]; Tel.: +886-7-6011000 (ext. 32511) Abstract: This study developed a novel, high-efficiency, high step-up DC–DC converter for pho- tovoltaic (PV) systems. The converter can step-up the low output voltage of PV modules to the voltage level of the inverter and is used to feed into the grid. The converter can achieve a high step-up voltage through its architecture consisting of a three-winding coupled inductor common iron core on the low-voltage side and a half-wave voltage doubler circuit on the high-voltage side. The leakage inductance energy generated by the coupling inductor during the conversion process can be recovered by the capacitor on the low-voltage side to reduce the voltage surge on the power switch, which gives the power switch of the circuit a soft-switching effect. In addition, the half-wave voltage doubler circuit on the high-voltage side can recover the leakage inductance energy of the tertiary side and increase the output voltage. The advantages of the circuit are low loss, high efficiency, high conversion ratio, and low component voltage stress. Finally, a 500-W high step-up converter was Citation: Wu, Y.-E.; Wang, J.-W. experimentally tested to verify the feasibility and practicability of the proposed architecture. -
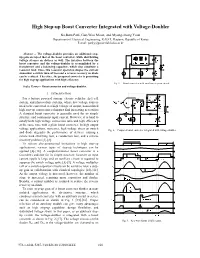
High Step-Up Boost Converter Integrated with Voltage-Doubler
High Step-up Boost Converter Integrated with Voltage-Doubler Ki-Bum Park, Gun-Woo Moon, and Myung-Joong Youn Department of Electrical Engineering, KAIST, Daejeon, Republic of Korea E-mail: [email protected] Abstract -- The voltage-doubler provides an additional step- up gain on top of that of the boost converter, while distributing voltage stresses on devices as well. The interface between the boost converter and the voltage-doubler is accomplished by a transformer and a balancing capacitor, which also constitute a resonant tank. Since this resonant operation shapes the current sinusoidal, a switch turn-off loss and a reverse recovery on diode can be reduced. Therefore, the proposed converter is promising for high step-up applications with high efficiency Fig. 1. Boost converter with auxiliary step-up circuit. Index Terms— Boost converter and voltage-doubler. I. INTRODUCTION For a battery powered system, electric vehicles, fuel cell system, and photovoltaic systems, where low voltage sources need to be converted to a high voltage of output, non-isolated high step-up conversion techniques find increasing necessities. A classical boost converter is generally used for its simple structure and continuous input current. However, it is hard to satisfy both high voltage conversion ratio and high efficiency at the same time with a plain boost converter. In high output voltage applications, moreover, high voltage stress on switch Fig. 2. Proposed boost converter integrated with voltage-doubler. and diode degrades the performance of devices, causing a severe hard switching loss, a conduction loss, and a reverse recovery problem [1]-[8]. To relieve abovementioned limitations in high step-up applications, various types of step-up techniques can be applied [4]-[14]. -

Switched Capacitor DC-DC Converters: a Survey on the Main Topologies, Design Characteristics, and Applications
energies Review Switched Capacitor DC-DC Converters: A Survey on the Main Topologies, Design Characteristics, and Applications Alencar Franco de Souza 1, Fernando Lessa Tofoli 2 and Enio Roberto Ribeiro 1,* 1 Institute of System Engineering and Information Technology, Federal University of Itajubá, Itajubá 37500-903, Brazil; [email protected] 2 Department of Electrical Engineering, Federal University of São João del-Rei, São João del-Rei 36307-352, Brazil; [email protected] * Correspondence: [email protected] Abstract: This work presents a review of the main topologies of switched capacitors (SCs) used in DC-DC power conversion. Initially, the basic configurations are analyzed, that is, voltage doubler, series-parallel, Dickson, Fibonacci, and ladder. Some aspects regarding the choice of semiconductors and capacitors used in the circuits are addressed, as well their impact on the converter behavior. The operation of the structures in terms of full charge, partial charge, and no charge conditions is investigated. It is worth mentioning that these aspects directly influence the converter design and performance in terms of efficiency. Since voltage regulation is an inherent difficulty with SC converters, some control methods are presented for this purpose. Finally, some practical applications and the possibility of designing DC-DC converters for higher power levels are analyzed. Keywords: DC-DC converters; integrated circuits; low-power electronics; semiconductors; switched capacitors Citation: Souza, A.F.d.; Tofoli, F.L.; Ribeiro, E.R. Switched Capacitor DC-DC Converters: A Survey on the Main Topologies, Design 1. Introduction Characteristics, and Applications. DC-DC converters are widely used in residential, commercial, and industrial applica- Energies 2021, 14, 2231. -

Semiconductor Diodes
Semiconductor diodes A modern semiconductor diode is made of a crystal of semiconductor like silicon that has impurities added to it to create a region on one side that contains negative charge carriers (electrons), called n-type semiconductor, and a region on the other side that contains positive charge carriers (holes), called p-type semiconductor. The diode's terminals are attached to each of these regions. The boundary within the crystal between these two regions, called a PN junction, is where the action of the diode takes place. The crystal conducts “electron current” in a direction from the n-type side (called the cathode), to the p-type side (called the anode), but not in the opposite direction or for those familiar with “conventional current” in a direction from the p-type side (called the anode) to the n-type side (called the cathode), but not in the opposite direction. Another type of semiconductor diode, the Schottky diode, is formed from the contact between a metal and a semiconductor rather than by a p-n junction. Rectifier A rectifier is an electrical device that converts alternating current (AC) to direct current (DC), a process known as rectification. Rectifiers have many uses including as components of power supplies and as detectors of radio signals. Rectifiers may be made of solid state diodes, vacuum tube diodes, mercury arc valves, and other components. A device which performs the opposite function (converting DC to AC) is known as an inverter. When only one diode is used to rectify AC (by blocking the negative or positive portion of the waveform), the difference between the term diode and the term rectifier is merely one of usage, i.e., the term rectifier describes a diode that is being used to convert AC to DC. -
Serial Switch Only Rectifier As a Power Conditioning Circuit
energies Article Serial Switch Only Rectifier as a Power Conditioning Circuit for Electric Field Energy Harvesting Oswaldo Menéndez * , Loreto Romero and Fernando Auat Cheein Department of Electronic Engineering, Universidad Técnica Federico Santa María, Valparaíso 2390123, Chile; [email protected] (L.R.); [email protected] (F.A.C.) * Correspondence: [email protected]; Tel.: +56-9-616-915-92 Received: 6 June 2020; Accepted: 26 September 2020; Published: 12 October 2020 Abstract: Because traditional electronics cannot directly use the alternating output voltage and current provided by electric field energy harvesters, harvesting systems require additional regulating and conditioning circuits. In this field, this work presents a conditioning circuit, called serial switch-only rectifier (SSOR) for low-voltage electric field energy harvesting (EFEH) applications. The proposed approach consists of a tubular topology harvester mounted on the outer jacket of a 230 V three-wires electrical cable (neutral, ground, and phase), in which terminals are connected to SSOR. We compare SSOR performance with classic electronic approaches, such as a full-bridge rectifier and voltage doubler. Experimental findings showed that the gathered energy by a 1 m cylindrical harvester increased in approximately 73.3% using the SSOR as a power management circuit. Experimental findings showed that the gathered energy by a 1 m cylindrical harvester increase in approximately 73.3% using the SSOR as a power management circuit. This increase is principally due to the fact that a serial bidirectional switch disconnects the harvester from the rest of the management circuit, enhancing the charge collection process. Although simulated results disclosed that SSOR increased collected energy for smaller-scale harvesters (experimental tests obtained using a 10 cm cylindrical harvester), additional losses in bidirectional switch reduced its performance.