FASTBUS SOFTWARE WORKSHOP Geneva, 23 and 24 September
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

SIS4100 VME to FASTBUS Interface User Manual
SIS Documentation SIS4100 FASTBUS Master SIS4100 VME to FASTBUS Interface User Manual SIS GmbH Moorhof 2d 22399 Hamburg Germany Phone: ++49 (0) 40 60 87 305 0 Fax: ++49 (0) 40 60 87 305 20 email: [email protected] http://www.struck.de Version: 1.01 as of 27.07.99 Page 1 of 57 SIS Documentation SIS4100 FASTBUS Master Revision Date Modification 0.1 01.02.99 Generation 1.0 26.07.99 First official release 1.01 27.07.99 some additions Copyright note: You are welcome to copy or reproduce this manual in part or whole as long as SIS GmbH is clearly indicated as originator (by the SIS GmbH FASTBUS icon on the top of the page e.g.). Page 2 of 57 SIS Documentation SIS4100 FASTBUS Master Table of contents 1 Introduction..................................................................................................................................................... 5 2 NGF Working Principle .................................................................................................................................. 6 3 Design ............................................................................................................................................................. 7 3.1 Features ................................................................................................................................................... 7 3.2 Mechanical concept................................................................................................................................. 7 3.3 VME properties...................................................................................................................................... -

Publication Title 1-1962
publication_title print_identifier online_identifier publisher_name date_monograph_published_print 1-1962 - AIEE General Principles Upon Which Temperature 978-1-5044-0149-4 IEEE 1962 Limits Are Based in the rating of Electric Equipment 1-1969 - IEEE General Priniciples for Temperature Limits in the 978-1-5044-0150-0 IEEE 1968 Rating of Electric Equipment 1-1986 - IEEE Standard General Principles for Temperature Limits in the Rating of Electric Equipment and for the 978-0-7381-2985-3 IEEE 1986 Evaluation of Electrical Insulation 1-2000 - IEEE Recommended Practice - General Principles for Temperature Limits in the Rating of Electrical Equipment and 978-0-7381-2717-0 IEEE 2001 for the Evaluation of Electrical Insulation 100-2000 - The Authoritative Dictionary of IEEE Standards 978-0-7381-2601-2 IEEE 2000 Terms, Seventh Edition 1000-1987 - An American National Standard IEEE Standard for 0-7381-4593-9 IEEE 1988 Mechanical Core Specifications for Microcomputers 1000-1987 - IEEE Standard for an 8-Bit Backplane Interface: 978-0-7381-2756-9 IEEE 1988 STEbus 1001-1988 - IEEE Guide for Interfacing Dispersed Storage and 0-7381-4134-8 IEEE 1989 Generation Facilities With Electric Utility Systems 1002-1987 - IEEE Standard Taxonomy for Software Engineering 0-7381-0399-3 IEEE 1987 Standards 1003.0-1995 - Guide to the POSIX(R) Open System 978-0-7381-3138-2 IEEE 1994 Environment (OSE) 1003.1, 2004 Edition - IEEE Standard for Information Technology - Portable Operating System Interface (POSIX(R)) - 978-0-7381-4040-7 IEEE 2004 Base Definitions 1003.1, 2013 -

Force CPCI-680 Manual (Pdf)
Full-service, independent repair center -~ ARTISAN® with experienced engineers and technicians on staff. TECHNOLOGY GROUP ~I We buy your excess, underutilized, and idle equipment along with credit for buybacks and trade-ins. Custom engineering Your definitive source so your equipment works exactly as you specify. for quality pre-owned • Critical and expedited services • Leasing / Rentals/ Demos equipment. • In stock/ Ready-to-ship • !TAR-certified secure asset solutions Expert team I Trust guarantee I 100% satisfaction Artisan Technology Group (217) 352-9330 | [email protected] | artisantg.com All trademarks, brand names, and brands appearing herein are the property o f their respective owners. Find the Emerson / Motorola / Force Computers cPCI-680 at our website: Click HERE PPC/PowerCoreCPCI-680 Reference Guide P/N 214452 Revision AB September 2001 Copyright The information in this publication is subject to change without notice. Force Computers, GmbH reserves the right to make changes without notice to this, or any of its products, to improve reliability, performance, or design. Force Computers, GmbH shall not be liable for technical or editorial errors or omissions contained herein, nor for indirect, special, incidental, or consequential damages resulting from the furnishing, performance, or use of this material. This information is pro- vided “as is” and Force Computers, GmbH expressly disclaims any and all warranties, express, implied, statutory, or otherwise, including without limitation, any express, statutory, or implied warranty of merchantability, fitness for a particular purpose, or non-infringement. This publication contains information protected by copyright. This publication shall not be reproduced, transmitted, or stored in a retrieval system, nor its contents used for any purpose, without the prior written consent of Force Computers, GmbH. -

Microtca.4 at SIRIUS and a CLOSER LOOK INTO the COMMUNITY
8th Int. Beam Instrum. Conf. IBIC2019, Malmö, Sweden JACoW Publishing ISBN: 978-3-95450-204-2 ISSN: 2673-5350 doi:10.18429/JACoW-IBIC2019-WEBO02 MicroTCA.4 AT SIRIUS AND A CLOSER LOOK INTO THE COMMUNITY D. O. Tavares∗, G. B. M. Bruno, S. R. Marques, L. M. Russo, H. A. Silva, LNLS, Campinas, Brazil Abstract light source facilities and demonstrators of the ILC technolo- More and more facilities have been adopting MicroTCA.4 gies, DESY soon took a prominent role in the development as the standard for new electronics. Despite the advertised of ATCA and MicroTCA standard extensions for physics. advantages in terms of system manageability, high availabil- An evaluation campaign for both standards was launched ity, backplane performance and supply of high quality COTS around 2007 [5] and reported on 2009 [6, 7], with ATCA- modules by industry, the standard still lacks a greater accep- based LLRF demonstration and an AMC timing receiver tance in the accelerators community. This paper reports on developed in collaboration with the University of Stockholm. the deployment of MicroTCA.4 systems at Sirius light source, In the following years MicroTCA.4 was fully embraced by which comprised the development and manufacturing of sev- FLASH and European XFEL projects. More recently, an eral open hardware modules, development of a generic gate- R&D and technology transfer center has been established, ware/software framework and re-implementation of MMC the MicroTCA Technology Lab [8]. IPMI firmware as an open source project. A special focus will be given to the difficulties found, unforeseen expansions CURRENT STATUS of the system and general architectural aspects. -
MTCA.4 Backplane Architecture
MicroTCA.4 /4.1 Hardware Standards & Software Guidelines Progress Overview Ray Larsen SLAC National Accelerator Laboratory for the xTCA for Physics Collaboration TIPP’17Beijing PRC May 26, 2017 May 22-26 2017 TIPP’17 Beijing R. Larsen 1 Standard Platforms for Physics • Major Goals: Interoperable HW-SW components – 1. Interoperable HW-SW platform essentials, software diagnostics, interfaces – Lab users & Industry Collaboration to share, save on development costs – Speed “time to market”, lower costs by commercial availability, avoid 1-supplier traps (incl. custom lab sol’n) – Avoid dependence on vendor proprietary solution – Adaptable to new technology needs for >/= 2 decades TIPP’17 Beijing R. Larsen May 22-26 2017 2 Physics Standards History • Standards driven by new innovations for economic, performance advantages • Lab-Developed Standards Timeline – 50 Years ago, ~1965, NIM, Nuclear Instrument Module – 40 Years ago, ~1975, CAMAC Data bus modules – 30 Years ago, ~1985, FASTBUS 10X BW bidirectional – 12+ Years ago, ~2004, ATCA, MTCA announced • Multi-GHz serial technology backplane • Redundancy for 0.99999 Availability at Shelf (Crate) level • Intelligent Platform Management Interface (IPMI) – 7+ Years ago- 2009 MTCA.4 HW, SW WG’s begin TIPP’17 Beijing R. Larsen May 22-26 2017 3 Physics Standards Timeline MTCA.4.1, SW SDM, SPM ‘17 107-11 76-9 MTCA.4.1, SW HP, SHAPI ‘16 5-56 ATCA 3.8, MTCA.4 ’10,11 ATCA ‘04 4 3 FASTBUS ‘85 2 CAMAC ‘75 1 NIM ‘65 0 1940 1960 1980 2000 2020 TIPP’17 Beijing R. Larsen May 22-26 2017 4 Physics Standards History -
High Availability Instrumentation Packaging Standards for the ILC & Detectors
SLAC-PUB-12208 November 2006 High Availability Instrumentation Packaging Standards for the ILC & Detectors R. W. Downing1 and R. S. Larsen2, Members, IEEE Abstract– ILC designers are exploring new packaging The main focus of this paper is the development of HA standards for Accelerator Controls and Instrumentation, packaging standards for Accelerator Controls and particularly high-speed serial interconnect systems for intelligent Instrumentation, but the techniques are equally applicable to instruments versus the existing parallel backplanes of VME, VXI data acquisition and detector systems. The Telco industry has and CAMAC. The High Availability Advanced Telecom Computing Architecture (ATCA) system is a new industrial open driven HA design for many years and has recently standard designed to withstand single-point hardware or collaborated on a new open specification, the Advanced software failures. The standard crate, controller, applications Telecom Computing Architecture, ATCA or AdvancedTCA. module and sub-modules are being investigated. All modules and Adoption of a commercially available standard electronics is sub-modules are hot–swappable. A single crate is designed for a of prime importance for ILC to achieve a common design data throughput in communications applications of 2 Tb/s and an platform, low engineering costs and high system reliability. Availability of 0.99999, which translates into a downtime of five minutes per year. The ILC is planning to develop HA The Baseline model for ILC is a 15 km long machine tunnel architectures for controls, beam instrumentation and detector with a parallel service tunnel that allows access to most of the systems. control and instrumentation electronics while the machine is running. -
A Comparative Discussion of Bus/Crate Standards and Their Use at CERN
A comparative discussion of bus/crate standards and their use at CERN Markus Joos CERN 1 DAQ/FEE/Trigger for COMPASS beyond 2020 workshop – Prague – 10.11.2017 Please note This presentations includes the personal opinions of several experienced colleagues: • Alex Kluge for ALICE • Philippe Farthouat for ATLAS • Magnus Hansen for CMS • Niko Neufeld and Ken Wyllie for LHCb • Javier Serrano and Marc Vanden Eynden for the Accelerator Controls group • Vincent Bobillier and Francois Vasey for the xTCA evaluation project Contradictory pieces of information reflect that different view points or “cultures” exist in different areas of CERN. This leads to different solutions for problems that may appear similar. The slides contain more material than I can present in 30 minutes. I hope you will find the bonus slides useful for off-line reading. The CERN schedule All accelerators and experiments are stopped every ~4 years for maintenance (LS = long shutdown) LS1: 2013 - 2014 LS2: 2019 - 2020 LS3: 2024 - 2026 2 Standards covered in this talk • NIM (http://www.osti.gov/scitech/servlets/purl/7120327) • VITA (www.vita.com) • VMEbus • VXS • PICMG(www.picmg.org) • CompactPCI (and its derivative PXI) • PCIe cards • PICMG 1.3 and 1.4 • ATCA • MTCA • AMC Standards NOT covered in this talk • Fastbus & Camac: Rarely used (at CERN), niche markets • VXI: Similar to VME • VPX: I (and my colleagues) have no experience with it 3 NIM Year 1964 Module 34 x 221 x 246 mm dimensions Connector 42 pins (29 reserved since 1964) Special features NIM modules (usually) • Need -
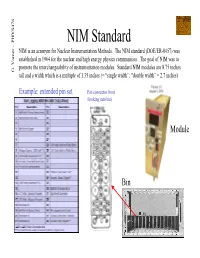
NIM Standard E Of1.35Inches(=“Singlewidt (Looking Intobin) Bin Connectorfront Methods
NIM Standard NIM is an acronym for Nuclear Instrumentation Methods. The NIM standard (DOE/ER-0457) was established in 1964 for the nuclear and high energy physics communities. The goal of NIM was to promote the interchangeability of instrumentation modules. Standard NIM modules are 8.75 inches G. Varner – PHYS476 tall and a width which is a multiple of 1.35 inches (= “single width”; “double width” = 2.7 inches) Example: extended pin set Bin connector front (looking into bin) Module Bin CAMAC Standard CAMAC is also an acronym: Computer Automated Measurement and Control. The CAMAC standard (IEEE 583) was established in 1975 and has been used in virtually every physics laboratory and many industrial applications. While other modular instrumentation standards have been widely adopted, the G. Varner – PHYS476 robust CAMAC module and enclosure construction and simple hardware level interface means CAMAC is still a viable choice for instrument applications today. Separate 24-bit Read/Write Busses Simple FNAD commanding: e.g. F = 0 (read) N = 1 (crate slot) A = card channel # D = data (either) Z = initialize (reset) X = I’m responding Q = zero suppress L = LAM (Look-At-Me) LeCroy 3377 500ps multi-hit TDC FASTBUS Standard FASTBUS is a standard largely exclusive to High Energy Physics. Detailed in ANSI/IEEE 960 and IEC-547, it is designed for VERY high power operation (many kW per crate – from the age of ECL) G. Varner – PHYS476 Hundreds of pins, Impossible to detail here and it is likely you will never need to know this. Mechanics are frightening: bed of nails in back. -

A Conceptual Design for the Triumf Kaon Factory Control System
TRIUMF A CONCEPTUAL DESIGN FOR THE TRIUMF KAON FACTORY CONTROL SYSTEM W.K. Dawson, R.W. Dobinson,* D.P. Gurd and Ch. Serre* TRIUMF Technology Division *on leave of absence from CERN CANADA'S NATIONAL MESON FACILITY OPERATED AS A JOINT VENTURE BY: UNIVERSITY OF ALBERTA SIMON FRASER UNIVERSITY UNIVERSITY OF VICTORIA UNIVERSITY OF BRITISH COLUMBIA UNDER A CONTRIBUTION FROM THE NATIONAL RESEARCH COUNCIL OF CANADA TRI-87-1 TRI-87-1 A CONCEPTUAL DESIGN FOR THE TRIUMF KAON FACTORY CONTROL SYSTEM W.K. Dawson, R.W. Dobinson,* D.P. Gurd and Ch. Serre* TRIUMF Technology Division *on leave of absence from CERN Postal address: TRIUMF 4004 Wesbrook Mall Vancouver, B.C. Canada V6T 2A3 December 1987 All trademarks found in this report are acknowledged as such. ii TABLE OF CONTENTS 1.0 Introduction 1-1 1.1 Why Was a Design Study Undertaken? 1-1 1.2 How Was the Work Carried Out? 1-1 1.3 Report Layout 1-2 1.4 Acknowledgements 1-3 2.0 Requirements 2-1 2.1 The Accelerators - 2-1 2.2 Timing and Synchronization 2-1 2.3 Multiple Rings, Physical Size and Complexity 2-4 2.4 High Intensity 2-5 2.5 Safety Systems 2-6 2.6 Users of the Control System 2-7 2.7 General Needs - Motherhood and Apple Pie 2-9 3.0 Review of Current Technologies and Trends in Other Laboratories . 3-1 3.1 The Importance and Role of Protocols and Standards 3-1 3.1.1 Review 3-1 3.1.2 Trends in Other Laboratories 3-2 3.2 Software 3-3 3.2.1 Review 3-3 3.2.2 Trends in Other Laboratories . -

Portovi Personalnih Računara 50
Elektronski fakultet u Nišu Katedra za elektroniku Portovi i magistrale Student: Mentor: Vladimir Stefanović 11422 prof. dr Mile Stočev Milan Jovanović10236 Sadržaj Uvod 3 1.Magistrale 4 2.Portovi dati alfabetnim redom 36 3.Portovi personalnih računara 50 4.Poređenja i opisi PC interfejsa i portova 59 5.Hardver – mehaničke komponente 126 2 Uvod Sam rad se sastoji iz 5 dela u kojima su detaljno opisani PC portovi, magistrale, kao i razlike i sličnosti koje među njima postoje. U prvom poglavlju data je opšta podela magistrala, ukratko je opisan njihov način funkcionisanja, dati su odgovarajući standardi, generacije, a ukratko su opisane i suerbrze magistrale. U drugom poglavlju dat je alfabetni spisak portova, od kojih je većina obuhvaćena ovim radom. Treće poglavlje odnosi se na portove personalnih računara, kako Pentium tako i Apple i Mackintosh. Četvrti deo odnosi se na opisane portove i interfejse i njihovo međusobno poređenje. U ovom poglavlju date su i detaljne tabele u kojima su navedene i opisane neke od najvažnijih funkcija. I konačno, peto poglavlje se odnosi na hardver – USB portove, memorijske kartice SCSI portove. U Nišu, 03.10.2008. godine 3 1. Magistrale Prilagodljivost personalnog računara - njegova sposobnost da se proširi pomoću više vrsta interfejsa dozvoljavajući priključivanje mnogo različitih klasa dodatnih sastavnih delova i periferijskih uredjaja - bila je jedan od ključnnih razloga njegovog uspeha. U suštini, moderni PC računarski sistem malo se razlikuje od originalne IBM konstrukcije - to je skup komponenata, kako unutrašnjih tako i spoljašnjih, medjusobno povezanih pomoću elektronskih magistrala, preko kojih podaci putuju, dok se obavlja ciklus obrade koji ih pretvara od podataka ulaza u podatke izlaza. -

Price List Currency : EURO (€) Currency Rate: 1 € = 1.56 CHF Price : EXW - Geneva
FAST S.A. First Automation System Technology Rue du Grand-Pré 70 CH-1202 Geneva / Switzerland Tél.: +41(0)22-918.36.70 Fax : +41(0)22-918.36.98 Year : 2005 e-mail : [email protected] Established on : March 4th, 2005 * Price List Currency : EURO (€) Currency rate: 1 € = 1.56 CHF Price : EXW - Geneva FASTbus I/O, a high-bandwidth Input / Output fieldbus * This document can be modified at any time without notice FASTware, the complete Control Command Workbench System FASTbus FASTbus is a high-bandwidth bit-parallel, byte-serial fieldbus designed by FAST SA. This fieldbus concept allows to remote the Input/ Output devices up to 40m from the Industrial PC. FASTbus is the unique solution when the control command applications require hard real-time features and/or motion control. FASTware FASTware is an intuitive application builder environment using graphical and literal languages to design control command systems running on a standard PC plateform under Windows 2000®. Other Windows-based applications achieve dedicated features such as Man Machine Interface (MMI), remote diagnostics, ISO pre-processor by the means of specialized Active X® components. Page:1/7 FAST S.A. - Price List 2005 rev. C FASTbus INPUT/OUTPUT MODULES These modules are mounted on a DIN-rail in the electric enclosure of the equipment. This concept allows to place the modules close to sensors and actuators. They are powered by a 24Vdc power supply. The screw connector plugs make easier the installation and replacement in the field. 1.1 Digital Inputs/Outputs Reference Description Discount Price w/o VAT Rate € FBLINP-32D ** 32 opto-isolated Digital Inputs 24Vdc @10mA, common GND 1 410 FBLOUT-32C ** 32 opto-isolated Digital Outputs 24Vdc @2A, common GND and open-drain (Max. -
APPLICATIONS for the SCALABLE COHERENT INTERFACE* T.- David B
I SLAC - PUB - 5244 April 1990 (1) -. APPLICATIONS FOR THE SCALABLE COHERENT INTERFACE* t.- David B. Gustavson -. Stanford Linear Accelerator Center, Stanford, CA 94309 ABSTRACT IEEE P1596, the Scalable Coherent Interface (formerly known as SuperBus) is based on experience gained while developing Fastbus (ANSI/IEEE 960-1986, IEC 935), Futurebus (IEEE P896.x) and other modern high-performance buses. SC1 goals include a minimum bandwidth of 1 GByte/sec per processor in multiprocessor systems with thousands of processors; efficient support of a coherent distributed-cache image of distributed shared memory; support for bridges which interface to existing or future buses; and support for inexpensive small rings as well as for general switched interconnections like Banyan, Omega, or crossbar networks. This paper reports the status of the work in progress and suggests some applications in data acquisition and physics. A COMPUTING-INDUSTRY PROBLEM The coming generation of supercomputers-on-a-chip has raised computation price/performance expectations, wreaking havoc in the supercomputer industry. However, actually delivering the performance these chips promise requires new supporting infrastructure. Several supercomputer manufacturers have gone out of business recently; the reason is certainly not lack of demand for computation, but rather that supercomputer mainframes do not appear to be cost-effective when compared with workstations or network compute servers. (However, some problems really do require the resources of a supercomputer, particularly their large main memory and high I/O bandwidth.) In order to produce a successful supercomputer, one has to develop new technology. Unfortunately, this is dangerously unpredictable, expensive and time consuming. By the time the technology is debugged and the final machine is ready to deliver, the faster- moving integrated circuit technology has produced processors which are so fast that a thousand dollars worth of new chips promises a significant fraction of the throughput of the multi-million-dollar supercomputer.