Technology Forecasting of Electric Vehicles Using Data Envelopment Analysis
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Presentation to Repsol
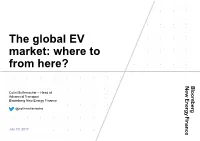
The global EV market: where to from here? Colin McKerracher – Head of Advanced Transport Bloomberg New Energy Finance @colinmckerrache July 10, 2017 Analysis to help you understand the future of energy Solar Wind Power and Gas Carbon Energy Smart Storage Electric Mobility and Frontier Emerging Utilities Markets & Technologies Vehicles Autonomous Power Technologies Climate Driving Americas Europe, Middle East Asia Pacific & Africa 1 July 10, 2017 Global EV sales by region 2011-2017e, thousand units YoY growth +69% +40% +56% +55% +47% Thousand units 1,200 We expect passenger EV 1,018 1,000 sales to be just over 1m in 46 2017 800 218 695 21 600 158 283 448 23 400 209 288 32 115 206 29 200 122 27 116 182 435 96 36 283 30 96 56 66 114 0 2012 2013 2014 2015 2016 2017 China Europe US Japan Canada South Korea RoW Note: Includes highway-capable PHEV and BEV passenger vehicles only; RoW is “Rest of World” 2 July 10, 2017 Countries where EVs were above 1% of total passenger vehicle sales Bloomberg New Energy Finance, Marklines 3 July 10, 2017 BEV model availability, 2008-20 Jaguar Tesla VW I.D.* Land Rover Toyota Trumpchi VW I.D. CROZZ Defender RAV4 GS4 I-Pace pickup* Mitsubishi eX BMW i5 Volvo 40.2* SUVs/Trucks Tesla Tesla M-B EQ VW Model Y* Model X Chehejia Audi E-tron Budd-e M-B B-Class BYD e6 NIO ES8* SUV* Quattro Porsche E-sport Renault DeZir Qianto Q50 Venturi Fetish Tesla Roadster Tesla Model S Sports cars Tesla Roadster* M-B SLS eDrive Hyundai Ioniq Aston Martin GLM G4 NIO ES9 Audi R8 E-tron Exagon Furtive Mahindra eVerito RapidE Geely Emgrand NIO EVE ChangAn SAIC E-Lavida Tesla Model 3 LeEco LeSEE Eado Mullen 700e Lucid Air Sedans CODA EV Audi E-tron Faraday Honda Clarity BAIC EU260 Sportback JAC iEV4 Renault Fluence BYD e5 FF91 Kia Ray Hyundai BMW i3 M-B E-Cell BlueOn VW e-Golf Chevy Bolt VW I.D. -

FOURIN's China Auto Data Directory Your Best Source of Information on the Chinese Automotive Industry and Market
FOURIN's China Auto Data Directory Your Best Source of Information on the Chinese Automotive Industry and Market ■Format: Excel ■Release Date: September 30, 2011 ■Price: 90,000JPY (excl. VAT for Japan orders) Invaluable Intelligence and Data to Support Any Automotive Business in China The only way you can stay ahead of the crowd and be the person of the moment is to have the best information available when you need it the most. FOURIN is beginning a new service offering a detailed and user-friendly database on major automakers and parts manufacturers in China. Data are provided to you in Excel format, allowing rapid searching, sorting and transfer. Based on years of close cooperation with trusted customers, the database is tailored to the needs of automotive industry professionals who are in need of detailed facts on major players in the Chinese automotive industry. Rather than wading through endless number of press releases and media reports, you choose the data that is important to you and see it in a well-organized table immediately. The database currently includes approximately 1,500 production bases and other facilities of around 200 Chinese and foreign automakers andparts suppliers. FOURIN's China Auto Data Directory (Sample) Data Source Location Location Establishment Operation Base Name Main Products (APC)/ Activities APC (units) Company (City) (Admin. Unit) Date Start CBU (4 platforms: Chery, Riich, Rely, Chery Automobile Co., Ltd. Wuhu Anhui Jan. 1997 Dec. 1999 CBU 900,000 units (2010) Karry), engines, transmissions 150,000 units (2010)→ Chery Automobile - No.1 Plant Wuhu Anhui Mar. 1997 Dec. -

Poland Regional Cities-Comfort-Vehicle-List
Make Model Year Oldsmobile 19 Oldsmobile Alero Oldsmobile Aurora Oldsmobile Bravada Oldsmobile Cutlass Supreme Oldsmobile Intrigue Oldsmobile Silhouette Dodge Attitude Dodge Avenger 2013 Dodge Caliber Dodge Caravan 2015 Dodge Challenger Dodge Charger 2013 Dodge Dakota Dodge Dart 2015 Dodge Durango 2013 Dodge Grand Caravan 2015 Dodge Intrepid Dodge JCUV Dodge Journey 2013 Dodge Magnum 2013 Dodge Neon 2015 Dodge Nitro 2013 Dodge Ram 1500 Dodge Ram 2500 Dodge Ram 3500 Dodge Ram 4500 Dodge Ram 700 Dodge Ram Van 2015 Dodge Sprinter Dodge Stratus 2015 Dodge Stretch Limo Dodge Viper Dodge Vision Dodge i10 Land Rover Defender 2013 Land Rover Discovery 2013 Land Rover Freelander 2013 Land Rover Freelander 2 Land Rover LR2 Land Rover LR3 Land Rover LR4 Land Rover Range Rover 2013 Land Rover Range Rover Evoque 2013 Land Rover Range Rover Sport 2013 Land Rover Range Rover Velar 2013 Land Rover Range Rover Vogue 2013 Chevrolet Agile Chevrolet Astra 2015 Chevrolet Astro Chevrolet Avalanche 2013 Chevrolet Aveo Chevrolet Aveo5 Chevrolet Beat Chevrolet Blazer Chevrolet Bolt Chevrolet CMV Chevrolet Camaro Chevrolet Caprice Chevrolet Captiva 2013 Chevrolet Cavalier Chevrolet Celta Chevrolet Chevy Chevrolet City Express Chevrolet Classic Chevrolet Cobalt 2015 Chevrolet Colorado Chevrolet Corsa Chevrolet Corsa Sedan Chevrolet Corsa Wagon Chevrolet Corvette Chevrolet Corvette ZR1 Chevrolet Cruze 2015 Chevrolet Cruze Sport6 Chevrolet Dmax Chevrolet Enjoy Chevrolet Epica 2013 Chevrolet Equinox 2013 Chevrolet Esteem Chevrolet Evanda 2013 Chevrolet Exclusive Chevrolet -

Electric Vehicles in China: BYD Strategies and Government Subsidies
Available online at www.sciencedirect.com RAI Revista de Administração e Inovação 13 (2016) 3–11 http://www.revistas.usp.br/rai Electric vehicles in China: BYD strategies and government subsidies a,∗ b c d Gilmar Masiero , Mario Henrique Ogasavara , Ailton Conde Jussani , Marcelo Luiz Risso a Universidade de São Paulo (USP), São Paulo, SP, Brazil b Programa de Mestrado e Doutorado em Gestão Internacional, Escola Superior de Propaganda e Marketing, São Paulo, SP, Brazil c Funda¸cão Instituto de Administra¸cão (FIA), São Paulo, SP, Brazil d Faculdade de Economia, Administra¸cão e Contabilidade, Universidade de São Paulo, São Paulo, SP, Brazil Received 20 October 2015; accepted 25 January 2016 Available online 13 May 2016 Abstract Central and local governments in China are investing heavily in the development of Electric Vehicles. Businesses and governments all over the world are searching for technological innovations that reduce costs and increase usage of “environmentally friendly” vehicles. China became the largest car producer in 2009 and it is strongly investing in the manufacturing of electric vehicles. This paper examines the incentives provided by Chinese governments (national and local) and the strategies pursued by BYD, the largest Chinese EVs manufacturer. Specifically, our paper helps to show how government support in the form of subsidies combined with effective strategies implemented by BYD helps to explain why this emerging industry has expanded successfully in China. Our study is based on primary data, including interviews with company headquarters and Brazilian subsidiary managers, and secondary data. © 2016 Departamento de Administrac¸ão, Faculdade de Economia, Administrac¸ão e Contabilidade da Universidade de São Paulo - FEA/USP. -

68 DIÁRIO OFICIAL Nº 33769 Sexta-Feira, 28 DE
68 DIÁRIO OFICIAL Nº 33769 Sexta-feira, 28 DE DEZEMBRO DE 2018 5932 106701 I/CADILLAC SEVILLE STS G 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5933 216311 I/CADILLAC SRX G 0,00 0,00 0,00 0,00 0,00 0,00 3.286,00 2.929,00 2.856,00 2.832,00 2.431,00 0,00 2.347,00 2.111,00 1.959,00 5934 216326 I/CADILLAC SRX AWD G 0,00 0,00 0,00 0,00 0,00 0,00 4.576,00 3.896,00 3.620,00 0,00 0,00 0,00 0,00 0,00 0,00 5935 216330 I/CADILLAC SRX AWD T PRE G 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 3.827,00 0,00 0,00 0,00 0,00 0,00 0,00 5936 216335 I/CADILLAC SRX CROSSOVER G 0,00 0,00 0,00 0,00 0,00 0,00 0,00 3.349,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5937 216322 I/CADILLAC SRX FWD G 0,00 0,00 0,00 0,00 4.568,00 0,00 0,00 2.808,00 0,00 2.598,00 0,00 0,00 0,00 0,00 0,00 5938 216324 I/CADILLAC SRX LUXURY G 0,00 0,00 0,00 0,00 0,00 0,00 3.967,00 3.529,00 3.379,00 0,00 0,00 0,00 0,00 0,00 0,00 5939 216328 I/CADILLAC SRX PREMI AWD G 0,00 0,00 0,00 0,00 0,00 0,00 0,00 2.965,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5940 216327 I/CADILLAC SRX PREMIUM G 0,00 0,00 0,00 0,00 4.955,00 4.676,00 4.457,00 3.930,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5941 216325 I/CADILLAC SRX4 G 0,00 0,00 0,00 0,00 0,00 0,00 4.475,00 4.072,00 3.884,00 0,00 0,00 0,00 0,00 0,00 0,00 5942 106712 I/CADILLAC STS G 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 971,00 0,00 5943 106716 I/CADILLAC XLR CONV G 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 4.468,00 0,00 0,00 0,00 5944 149589 I/CADILLAC XTS LUXURY G 0,00 0,00 0,00 0,00 0,00 0,00 7.042,00 -
2016 Annual Report.Pdf
International Energy Agency Implementing Agreement for Co-operation on Hybrid and Electric Vehicle Technologies and Programmes From 2016 on renamed to Technology Collaboration Programme on Hybrid and Electric Vehicles (HEV TCP) Hybrid and Electric Vehicles The Electric Drive Commutes June 2016 www.ieahev.org IA-HEV, formally known as the Implementing Agreement for Co-operation on Hybrid and Electric Vehicle Technologies and Programmes, functions within a framework created by the International Energy Agency (IEA). Views, findings, and publications of IA-HEV do not necessarily represent the views or policies of the IEA Secretariat or of all its individual member countries. From 2016 on the IA-HEV has been renamed to Technology Collaboration Programme on Hybrid and Electric Vehicles (HEV TCP). Cover Photo: Volvo electric bus. The bus is running on route 55 in Gothenburg (Sweden) as part of the ElectriCity collaboration. Further information about ElectriCity can be obtained over www.goteborgelectricity.se. (Image courtesy of Volvo Buses) The Electric Drive Commutes Cover Designer: Anita Theel, VDI/VDE Innovation + Technik GmbH ii International Energy Agency Implementing Agreement for Co-operation on Hybrid and Electric Vehicle Technologies and Programmes* Annual Report Prepared by the Executive Committee and Task 1 over the Year 2015 Hybrid and Electric Vehicles The Electric Drive Commutes Editor: Gereon Meyer (Operating Agent Task 1, VDI/VDE Innovation + Technik GmbH) Co-editors: Jadranka Dokic, Heike Jürgens, Diana M. Tobias (VDI/VDE Innovation + Technik GmbH) Contributing Authors: Markku Antikainen Tekes Finland James Barnes Barnes Tech Advising United States Martin Beermann Joanneum Research Austria Graham Brennan SEAI Ireland Carol Burelle Natural Resources Canada Canada Pierpaolo Cazzola IEA France Mario Conte ENEA Italy Cristina Corchero IREC Spain Andreas Dorda A3PS Austria Julie Francis Allegheny Science & Technology United States Marine Gorner IEA France Halil S. -

Planning Minimum Interurban Fast Charging Infrastructure for Electric Vehicles: Methodology and Application to Spain
Energies 2014, 7, 1207-1229; doi:10.3390/en7031207 OPEN ACCESS energies ISSN 1996-1073 www.mdpi.com/journal/energies Article Planning Minimum Interurban Fast Charging Infrastructure for Electric Vehicles: Methodology and Application to Spain Antonio Colmenar-Santos 1,*, Carlos de Palacio 2, David Borge-Diez 1 and Oscar Monzón-Alejandro 1 1 Industrial Engineering Higher Technical School, Spanish University for Distance Education (UNED), Juan del Rosal St., 12, Madrid 28040, Spain; E-Mails: [email protected] (D.B.-D.); [email protected] (O.M.-A.) 2 Power Systems Division, Asea Brown Boveri (ABB), San Romualdo 13, Madrid 28035, Spain; E-Mail: [email protected] * Author to whom correspondence should be addressed; E-Mail: [email protected]; Tel.: +34-91-398-7788; Fax: +34-91-398-6028. Received: 25 December 2013; in revised form: 2 February 2014 / Accepted: 8 February 2014 / Published: 27 February 2014 Abstract: The goal of the research is to assess the minimum requirement of fast charging infrastructure to allow country-wide interurban electric vehicle (EV) mobility. Charging times comparable to fueling times in conventional internal combustion vehicles are nowadays feasible, given the current availability of fast charging technologies. The main contribution of this paper is the analysis of the planning method and the investment requirements for the necessary infrastructure, including the definition of the Maximum Distance between Fast Charge (MDFC) and the Basic Highway Charging Infrastructure (BHCI) concepts. According to the calculations, distance between stations will be region-dependent, influenced primarily by weather conditions. The study considers that the initial investment should be sufficient to promote the EV adoption, proposing an initial state-financed public infrastructure and, once the adoption rate for EVs increases, additional infrastructure will be likely developed through private investment. -

Elektrikli Arabanin Türkçesi Geliştirme Raporu
Türkçe ELEKTRİKLİ ARABANIN TÜRKÇESİ GELİŞTİRME RAPORU ELEKTRİKLİ ARABANIN TÜRKÇESİ Geliştirme Raporu Yazarlar Kaan Özgen Mert Akdemir Mustafa Özen Oğuzhan Subaşı Uğur Şahin Ankara ‐ Türkiye, Ocak ©2010 Tüm Hakları Saklıdır İçindekiler Kısaltmalar listesi......................................................................................................IV Figürler listesi ...........................................................................................................VI BÖLÜM 1: GİRİŞ ....................................................................................................... 1 1.1 Motivasyon ........................................................................................................2 1.2 Problem tanımı ve hedefler...............................................................................2 1.3 Proje kapsamı ....................................................................................................3 BÖLÜM 2: PROJEYE BAKIŞ........................................................................................ 5 2.1 Pazar araştırması ...............................................................................................5 2.1.1 Akaryakıtla çalışan otomobil pazarı araştırması ................................5 2.1.2 Elektrikli araç modelleri araştırması ...................................................5 2.1.3 Model seçimi.....................................................................................12 2.1.4 Fiyat tahmini .....................................................................................12 -

CADERNO ESPECIAL IPVA Nº 33040 77 Quarta-Feira, 30 DE
Quarta-feira, 30 DE DEZEMBRO DE 2015 CADERNO ESPECIAL IPVA Nº 33040 77 5692 110010 I/CHERY FULWIN2 1.5 SD G 0,00 0,00 0,00 0,00 0,00 458,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5693 110027 I/CHERY G6 SEDAN AT G 0,00 0,00 691,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5694 201504 I/CHERY KARRY Q21E G 0,00 0,00 0,00 0,00 0,00 678,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5695 201508 I/CHERY KARRY Q22 G 0,00 0,00 0,00 0,00 699,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5696 201505 I/CHERY KARRY Q22 BCA G 0,00 0,00 0,00 0,00 617,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5697 201509 I/CHERY KARRY Q22 BCF G 0,00 0,00 0,00 0,00 616,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5698 201506 I/CHERY KARRY S22 G 0,00 0,00 0,00 0,00 701,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5699 110020 I/CHERY QQ 1.0 G 534,00 507,00 482,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5700 110031 I/CHERY QQ 1.0 ACT D 0,00 522,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5701 110031 I/CHERY QQ 1.0 ACT G 571,00 522,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5702 110024 I/CHERY QQ 1.1 G 563,00 520,00 430,00 390,00 358,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5703 110000 I/CHERY QQ3 1.1 G 0,00 0,00 0,00 0,00 300,00 0,00 0,00 262,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5704 110011 I/CHERY RIICH G5 G 0,00 0,00 0,00 0,00 0,00 822,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 0,00 5705 110007 I/CHERY RIICH M1 G 0,00 0,00 0,00 0,00 -

JMD OBD Living for the Locksmith,Saving for the Locksmith 1
JMD OBD 1 Living for the locksmith,Saving for the locksmith JMD OBD Catalogue Ⅰ. Product Brief......................................................... 1 Ⅱ. Security Information............................................ 2 Ⅲ. Instrument Components..................................... 3 Ⅳ. Installation of APP program:..............................3 1. Parameter requirements:..................................... 3 2. Download address.................................................3 Ⅴ. Brief introduction of operation.........................4 1. User registration.....................................................4 2. Functional selection.............................................. 9 3. Program upgrade:............................................... 12 4. OBD Information..................................................13 5. Password Retrieval Function............................ 16 Ⅵ. After-sales service description........................ 16 VII.JMD OBD IMMO type list................................. 17 2 Living for the locksmith,Saving for the locksmith JMD OBD Ⅰ. Product Brief Thank you for choosing JMD OBD car anti-theft matching instrument! JMD OBD is a car anti-theft matching instrument developed by JMD company.Cooperate with JMD Mobile App.Mainly supports five functions: anti-theft matching, odometer adjustment, remote control manual matching, automobile diagnosis, Assistant. Powerful and easy to operate, it is the most ideal matching equipment for your car maintenance. Special performance: The Bluetooth function of JMD OBD -
Build Your Own Electric Vehicle / Leitman / 373-2 / Front Matter Blind Folio PB
7 3/8 x 9 1/4 T echnical / Build Your Own Electric Vehicle / Leitman / 373-2 / Front Matter Blind Folio PB Build Your Own Electric Vehicle 7 3/8 x 9 1/4 T echnical / Build Your Own Electric Vehicle / Leitman / 373-2 / Front Matter Blind Folio PB About the Authors Seth Leitman (Briarcliff Manor, NY) is currently President and Managing Member of the ETS Energy Store, LLC, which sells organic, natural, and sustainable products for business and home use (from energy efficient bulbs to electric vehicle conversion referrals). Previously, he worked for the New York State Power Authority and the New York State Energy Research and Development Authority, where he helped develop, market, and manage electric and hybrid vehicle programs serving New York State and the New York metropolitan area. Seth is the consulting editor for a series of upcoming titles called the “Green Guru Guides,” which focus on implementing environmentally friendly technologies and making them work for you. Bob Brant was the author of the first book, and some might say ahead of his time in his passion to convert to electric. The first edition of this book was published in 1993. While there have obviously been updates and technological advances since that time, many of the concepts in that first book are still in use today. Bob grew up in New York City, got a BSEE, and worked on NASA projects such as Apollo, Lunar Excursion Module, and the Earth Resources Technology Satellite. He then went on to get an MSEE and MBA, and worked for a company that worked on the Lunar Rover. -

360 Degree Perspective of the Global Electric Vehicle Market Opportunities and New Business Models
360 Degree Perspective of the Global Electric Vehicle Market Opportunities and New Business Models Sarwant Singh Partner, Frost & Sullivan Agenda Future Urban Mobility and Society Trends and Its Implications to Personal Mobility, and Electric Vehicles Electric Vehicles Market Overview, Technology Roadmap and Infrastructure Trends Global EV Market Size and Forecasts – PVs, LCVs and 2 Wheelers Business Model Analysis of Key Industry Stakeholders (Utilities, charging station and other market participants) London Case Study Discussions 2 Definitions 3 Definitions – Electric Vehicles Battery Electric Vehicles: Electric vehicles (EVs) use electric motors instead of an internal combustion engine (ICE) to propel a vehicle. The electric power is derived from a battery of one of several chemistries including lead acid, nickel metal hydride (NiMH) and lithium-ion (Li-ion). Neighbourhood Plug-in Hybrid High-Performance City Electric Vehicles Extended-range Electric Vehicles Electric Vehicle Electric Vehicles EVs (E-REVs) (NEVs) (CEVs) (PHEVs) (HPEVs) NEV is a US DOT A city car is a These vehicles have A plug-in hybrid These are sporty classification for European classification an internal combustion electric vehicle (PHEV) PHEVs or battery vehicles weighing less for small and light engine (ICE) or other has an internal electric vehicles with than 3,000 lbs (GVW) vehicles intended for secondary source combustion engine top speeds exceeding and having a top speed use in urban areas connected in a series (ICE) with a motor 100 mph and driving of 25 mph. NEVs are although capable of configuration to a along with a battery range exceeding 100 generally restricted to operating in mixed city- generator to supply the connected in parallel to miles.