MONALISA 2, Activity 2: Main Deliverable Document Template
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

2018 PSK Kalender
Mon Tue Wed Thu Fri Sat Sun Mon Tue Wed Thu Fri Sat Sun Mon Tue Wed Thu Fri Sat Sun Mon Tue Wed JAN 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 29er MM, HKG Miami MK, USA DN, IO EKV I etapp DN, IO EKV II etapp FEB 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 DN juunioride & Ice-Optimist MM & EM Monotüüp-XV EM DN, IO Eesti MV MAR 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 DN MM & EM, EST Finn EM, ESP Salou treeninglaager , ESP DN, IO EKV IV etapp DN, IO Saadjärve GP APR 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 Laser 4.7 EM, GRE Laser Radial JEM, HUN RS Feva MM, USA Trofeo S.A.R. Princesa Sofia, ESP Techno293+ EM, ITA Palermo MAY 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 Laser Radial & Laser Standard EM, FRA 470 EM, BUL Medemblik Regatta, NED JUN 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 Melges 24 MM, CAN Vanalinna päevad Grillfest Laser Radial meeste MM, GER WC Final, Marseille FRA Kieler Woche, GER PPN LR,LS NP,Surf JUL 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 WS Youth Worlds, Corpus Christi, USA Laser Radial naiste & Laser Standard U21 MM, POL Zoom8 MM, FIN F18 EM, ESP Laser 4.7 MM, POL 470 JEM, POR 29er JMM, USA RS:X JMM, FRA Offshore MM, NED Spinnaker Muhu Väina regatt EJL90 TR,Feva,29er,49er HK,Feva,29er,49er Tallinna Merepäevad AUG 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 OM-klasside MM, DEN RS:X EM & JEM, POL Noorte PMV, SWE RS Feva EM, GBR Laser Radial JMM, GER 29er EM, FIN Laser Radial naiste & Laser Standard U21 EM, SWE Melges 24 EM, ITA -

27 Nov 2009 IHR Portslist0001.Mdi
IHR Authorized Ports List List of ports and other information submitted by the States Parties concerning ports authorized to issue Ship Sanitation Certificates under the International Health Regulations (2005) All States Parties to the International Health Regulations (2005) (IHR (2005)) are required to send to the World Health Organization (WHO) a list of all ports authorized by the State Party (including authorized ports in all of its applicable administrative areas and territories) to issue the following Ship Sanitation Certificates (SSC): - Ship Sanitation Control Certificates only (SSCC) and the provisions of the services referred to in Annex 1 and 3 - Ship Sanitation Control Exemption Certificates (SSCEC) only - Extensions to the SSC This list of authorized ports and other information is comprised of information submitted by the States Parties to WHO; WHO publishes this information in accordance with the requirements of the IHR (2005). This list will be updated by WHO as additional information is received from the States Parties. For further information on SSC please see: http://www.who.int/csr/ihr/travel/TechnAdvSSC.pdf Sources of codes and port location information. This listing utilizes information from the UN/LOCODE (United Nations Code for Trade and Transport Locations), published by UNECE (United Nations Economic Commission for Europe), as further modified by WHO. These UNLOCODE publications include ISO (International Organization for Standardization) codes and port location information. Notices. The designations employed and the presentation of material in this document, or in the underlying UN/LOCODE or ISO information sources, do not imply the expression of any opinion whatsoever on the part of WHO concerning the legal status of any country, territory, city, area or location or of its authorities, or concerning the delimitation of its frontiers or borders. -
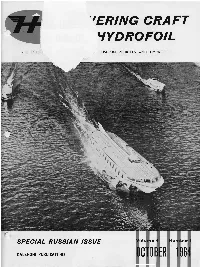
Hovering Craft & Hydrofoil Magazine October 1964 Volume 4 Number 1
''ERING CRAFT THE INTER. .i CUSHION VEHICLES AND HYDROFOILS SPECIAL RUSSIA N ISSUE iber 1 KALERGHI PUBLICATIONS OCTOBER 1964 HOVERING CRAFT & HYDROFOIL FOUNDED OCTOBER 1961 An artist's impression of the Viekers VA-4 at m Jerry quay. first Hovering Craft IL Hydrofoil Monthly in the World For fitrthcr dctuils see page 4 of this issrtc HYDROFOILS AND ACVs IN THE USSR A stafeincnt for Hovering Craft and Hydrofoil's Special Russian issue by Engineer Vladitnir I. Kiryushin, Second Secretary of the Department of Science and Technology at the USSR Et7zbassy in London N recent years many countries have been devoting great completed this year. intended for Sast passenger service between attention to the building of hydrofoils and air - cushion towns. Vessels of this type seem likely to prove uscful to I replace, or to supplement, the hydrol'oil vessels which are now vehicles, among these being the USSR, where scientific research running regular services on many of the great rivers of and constructional work is going on in these fields. The survey Siberia, such as the Ob', the Yenisyey, the Lyena and others, which appears in this issue of Hovering Craft K. Hydrofoil is as they would enable passenger transport services to be based on articles which have been published in various Soviet maintained throughout the year, i.e. even when the rivers newspapers and technical journals, and gives some idea of the are ice-bound. It is particularly noteworthy, moreover, that actual work on methods of calculation and construction of air-cushion vehicles are very useful as a means of transport in new types of hydrofoils and ACVs which has been carried those parts of the USSR which have only recently been out in the USSR. -

BONUS+ Project Balticway the Potential of Currents for Environmental Management of the Baltic Sea Maritime Industry (2009–2011) Executive Summary
BalticWay Final Report (2009–2011) Annual Report 3 (Jan – Dec 2011) BONUS+ Project BalticWay The Potential of Currents for Environmental Management of the Baltic Sea Maritime Industry Final Report 2009–2011 Annual Report 3: January– December 2011 Page 1 of 74 BalticWay Final Report (2009–2011) Annual Report 3 (Jan – Dec 2011) Table of Contents Executive Summary........................................................................................................................ 3 Project years: Synopsis and highlights ....................................................................................... 6 Scientific Results ............................................................................................................................ 8 Work Package 1 – Forcing and boundary data: ICR .................................................................. 8 Work Package 2 – Circulation modelling in the target areas: SMHI ....................................... 10 Work Package 3 – Particle trajectory and oil spill modelling: MISU ...................................... 12 Work Package 4 – Synthesis: Identification of areas of reduced risk: IFM-GEOMAR........... 14 Work Package 5 – Validation experiments: SYKE .................................................................. 17 Work Package 6 – Risk analysis and mathematics of inverse problems: IoC .......................... 19 Work Package 7 – Applications: DMI...................................................................................... 22 Work Package 8 – Management and -

Looduslik Ja Antropogeenne Morfodünaamika Eesti Rannikumere
THESIS ON CIVIL ENGINEERING F22 Lithohydrodynamic processes in the Tallinn Bay area ANDRES KASK TUT PRESS TALLINN UNIVERSITY OF TECHNOLOGY Faculty of Civil Engineering Department of Mechanics The dissertation was accepted for the defence of the degree of Doctor of Philosophy on June 28, 2009 Supervisor: Prof. Tarmo Soomere Department of Mechanics and Institute of Cybernetics Tallinn University of Technology, Estonia Opponents: Prof. Dr. Jan Harff Foundation for Polish Science Fellow, Institute of Marine Sciences University of Szczecin, Poland Prof. Dr. Anto Raukas Leading research scientist, Institute of Geology Tallinn University of Technology, Member of Estonian Academy of Sciences Defence of the thesis: August 21, 2009, Institute of Cybernetics at Tallinn University of Technology, Akadeemia tee 21, 12618 Tallinn, Estonia Declaration: Hereby I declare that this doctoral thesis, my original investigation and achievement, submitted for the doctoral degree at Tallinn University of Technology has not been submitted for any academic degree. Andres Kask Copyright: Andres Kask, 2009 ISSN 1406-4766 ISBN 978-9985-59-923-5 3 EHITUS F22 Litohüdrodünaamilised protsessid Tallinna lahe piirkonnas ANDRES KASK TUT PRESS 4 Contents List of tables .............................................................................................................. 7 List of figures ............................................................................................................ 7 Introduction .............................................................................................................. -
MSC Excursions
EXCURSIONS AVAILABLE FOR WELCOME BACK PACKAGE – MSC SEAVIEW NOR Guests choosing the WELCOME BACK with Excursions fare, can choose among a selction of one excursion per port, each with specific allotments and subject to availability, as per the below scheme. Guests are invited NOT to chose a tour in their embarkation/disembarkation port: MSC SEAVIEW: MSC SEAVIEW SUMMER 2021 - WELCOME BACK FARE TOURS PORT EXCURSION NAME DURATION PRICE Adult Visby VISAZ Highlights of Visby 3H00 WELCOME BACK Tallinn TALAZ Tallinn Highlights 3H30 WELCOME BACK Nynashamn NYNAZ Stockholm at a Glance 4H00 WELCOME BACK SHORE EXCURSIONS – SUMMER 2021 A dedicated selection of tours in every port has been created and is available for the Summer 2021 for both prepayment and on board sales. Please suggest Guests to choose the excursion available for the port of call right after their embarkation to guarantee their seat without any rush, as the call is the day after. IMPORTANT: Guests need to wear the mask indoor (restaurants, bus, venues) and each time they are not able to keep the social distancing of at least 1 metre. By taking part to an excursion Guests are accepting and committing to follow the instructions and regulations received by the guide. In case the health and safety of our guests is at risk MSC will be allowed to take actions. Please note that any Guest who, during the tour, voluntarily decide to leave our ship's sponsored Shore Excursion will be denied boarding. Please note that the following tour program is subject to changes, new tours currently under development may be added to the final program and descriptions are to be to reconfirmed on board. -

Maps -- by Region Or Country -- Eastern Hemisphere -- Europe
G5702 EUROPE. REGIONS, NATURAL FEATURES, ETC. G5702 Alps see G6035+ .B3 Baltic Sea .B4 Baltic Shield .C3 Carpathian Mountains .C6 Coasts/Continental shelf .G4 Genoa, Gulf of .G7 Great Alföld .P9 Pyrenees .R5 Rhine River .S3 Scheldt River .T5 Tisza River 1971 G5722 WESTERN EUROPE. REGIONS, NATURAL G5722 FEATURES, ETC. .A7 Ardennes .A9 Autoroute E10 .F5 Flanders .G3 Gaul .M3 Meuse River 1972 G5741.S BRITISH ISLES. HISTORY G5741.S .S1 General .S2 To 1066 .S3 Medieval period, 1066-1485 .S33 Norman period, 1066-1154 .S35 Plantagenets, 1154-1399 .S37 15th century .S4 Modern period, 1485- .S45 16th century: Tudors, 1485-1603 .S5 17th century: Stuarts, 1603-1714 .S53 Commonwealth and protectorate, 1660-1688 .S54 18th century .S55 19th century .S6 20th century .S65 World War I .S7 World War II 1973 G5742 BRITISH ISLES. GREAT BRITAIN. REGIONS, G5742 NATURAL FEATURES, ETC. .C6 Continental shelf .I6 Irish Sea .N3 National Cycle Network 1974 G5752 ENGLAND. REGIONS, NATURAL FEATURES, ETC. G5752 .A3 Aire River .A42 Akeman Street .A43 Alde River .A7 Arun River .A75 Ashby Canal .A77 Ashdown Forest .A83 Avon, River [Gloucestershire-Avon] .A85 Avon, River [Leicestershire-Gloucestershire] .A87 Axholme, Isle of .A9 Aylesbury, Vale of .B3 Barnstaple Bay .B35 Basingstoke Canal .B36 Bassenthwaite Lake .B38 Baugh Fell .B385 Beachy Head .B386 Belvoir, Vale of .B387 Bere, Forest of .B39 Berkeley, Vale of .B4 Berkshire Downs .B42 Beult, River .B43 Bignor Hill .B44 Birmingham and Fazeley Canal .B45 Black Country .B48 Black Hill .B49 Blackdown Hills .B493 Blackmoor [Moor] .B495 Blackmoor Vale .B5 Bleaklow Hill .B54 Blenheim Park .B6 Bodmin Moor .B64 Border Forest Park .B66 Bourne Valley .B68 Bowland, Forest of .B7 Breckland .B715 Bredon Hill .B717 Brendon Hills .B72 Bridgewater Canal .B723 Bridgwater Bay .B724 Bridlington Bay .B725 Bristol Channel .B73 Broads, The .B76 Brown Clee Hill .B8 Burnham Beeches .B84 Burntwick Island .C34 Cam, River .C37 Cannock Chase .C38 Canvey Island [Island] 1975 G5752 ENGLAND. -

23 October 2009 IHR Portslist0001.Mdi
IHR Authorized Ports List List of ports and other information submitted by the States Parties concerning ports authorized to issue Ship Sanitation Certificates under the International Health Regulations (2005) All States Parties to the International Health Regulations (2005) (IHR (2005)) are required to send to the World Health Organization (WHO) a list of all ports authorized by the State Party (including authorized ports in all of its applicable administrative areas and territories) to issue the following Ship Sanitation Certificates (SSC): - Ship Sanitation Control Certificates only (SSCC) and the provisions of the services referred to in Annex 1 and 3 - Ship Sanitation Control Exemption Certificates (SSCEC) only - Extensions to the SSC This list of authorized ports and other information is comprised of information submitted by the States Parties to WHO; WHO publishes this information in accordance with the requirements of the IHR (2005). This list will be updated by WHO as additional information is received from the States Parties. For further information on SSC please see: http://www.who.int/csr/ihr/travel/TechnAdvSSC.pdf Sources of codes and port location information. This listing utilizes information from the UN/LOCODE (United Nations Code for Trade and Transport Locations), published by UNECE (United Nations Economic Commission for Europe), as further modified by WHO. These UNLOCODE publications include ISO (International Organization for Standardization) codes and port location information. Notices. The designations employed and the presentation of material in this document, or in the underlying UN/LOCODE or ISO information sources, do not imply the expression of any opinion whatsoever on the part of WHO concerning the legal status of any country, territory, city, area or location or of its authorities, or concerning the delimitation of its frontiers or borders. -

Strategic Environmental Assessment of Estonian Marine Strategy`S Programme of Measures to Achieve and Maintain Good Environmental Status of Estonian Marine Area
Strategic Environmental Assessment of Estonian Marine Strategy`s Programme of Measures to achieve and maintain Good Environmental Status of Estonian marine area Draft report (12.10.2015) Client: OÜ Eesti Keskkonnauuringute Keskus Prepared by: Tallinna Tehnikaülikooli Meresüsteemide Instituut (Marine Systems Institute at Tallinn University of Technology) OÜ Alkranel Head of SEA working group: Alar Noorvee Tartu-Tallinn 2015 CONTENTS INTRODUCTION .................................................................................................................................... 5 1. PROGRAMME OF MEASURES AND ITS LIST OF NEW MEASURES ............................................ 7 2. OVERVIEW OF THE CURRENT SITUATION, PROBLEMS AND PRESSURES ............................. 9 2.1 Overview of the natural environment .............................................................................................. 9 2.1.1 Bathymetry, characteristics of seafloor and coast ...................................................................... 9 2.1.2 Temperature, salinity, stratification, ice cover ......................................................................... 11 2.1.3 Currents, wave regime and sea level ........................................................................................ 12 2.1.4 Nutrients and oxygen .............................................................................................................. 14 Plankton ......................................................................................................................................... -

Estonian Yacht Harbours
Estonian yacht harbours A comparative study by AARE OLL Ministry of Transport and Communications Tallinn 2001 LIST OF CONTENTS Introduction Estonia and its people ..................................................................................... 1 Legislative framework .................................................................................... 2 Navigational safety in Estonian waters ........................................................... 3 Estonian ports by ownership ........................................................................... 4 Estonian ports by activities ............................................................................. 6 Yachting in Estonia ......................................................................................... 7 Estonian and foreign pleasure boats ............................................................... 9 Travel conditions in Western Estonia Archipelago ........................................ 10 Customs regulations ........................................................................................ 11 Official regulations ......................................................................................... 14 Sources of information .................................................................................... 15 Map of Estonian yacht harbours……………………………………………...16 Ports and harbours Dirhami ........................................................................................................... 17 Haapsalu ......................................................................................................... -

THE CANDIDATES | 2021 Innovation in European Museums European Museum of the Year Award the CANDIDATES | 2021
European Museum of the Year Award THE CANDIDATES | 2021 Innovation in European Museums European Museum of the Year Award THE CANDIDATES | 2021 Innovation in European Museums EMF Board of Trustees 2021 EMF Jury 2021 ■ Jette Sandahl, Denmark (Chair) ■ Marlen Mouliou, (ex officio) (Chair, EMYA Jury ■ Mark O’Neill, United Kingdom (Chair – until ■ Bernadette Lynch, United Kingdom December 2020) Writer, lecturer, and researcher in museum theory ■ David Anderson, OBE, United Kingdom – from December 2020), Assistant Professor of Associate Professor, College of Arts, University of and practice Director, National Museums of Wales (until May Museology, National and Kapodistrian University of Glasgow 2020) Athens ■ Linda Mol, The Netherlands ■ Kimmo Antila, Finland (until December 2020) Head of Audience Engagement, Teylers Museum ■ Kimmo Antila, Finland ■ Mark O’Neill, United Kingdom (ex officio, Chair of Director, Finnish Postal Museum, Tampere Director, Finnish Postal Museum, Tampere (from ■ Marlen Mouliou, Greece (Chair – from EMYA Jury – until December 2020) December 2020) January 2020) ■ Christophe Dufour, Switzerland Assistant Professor of Museology, National and ■ Joan Roca i Albert, Spain Former Director, Muséum d’histoire naturelle de ■ Jonas Dahl, Sweden Kapodistrian University of Athens Neuchâtel Senior Advisor, Statement Public Affairs (Treasurer) Director, Barcelona City History Museum (MUHBA) ■ Adriana Munoz, Sweden (from January 2020) ■ Atle Faye, Norway ■ Sharon Heal, United Kingdom Curator, National Museums of World Culture, Communication -

Tallinn (Estonia)
EUROSION Case Study TALLINN (ESTONIA) Contact: Ramunas POVILINSKAS 8 EUCC Baltic office Tel: +37 (0)6312739 Fax: +37 (0)6398834 e-mail: [email protected] 1 EUROSION Case Study 1. GENERAL DESCRIPTION OF THE AREA The length of the Estonian coastline is 3,794 km of which 1,242 km are on the mainland and 2,552 km is divided among the 1,500 islands. The country is bounded to the north by the Gulf of Finland, to the west by the Baltic proper and to the southwest by the Gulf of Riga. Tallinn is the capital of Estonia. It is located in the north of the country on the coast of the Gulf of Finland. The case area covers the marine coast within the Tallinn metropolitan area between Kakumae and Muuga bays (Figure 2). It includes Tallinn urban municipality (linn) and Viimsi suburban municipality (vald) of Harju county (maa). 1.1 Physical process level 1.1.1 Classification According to the coastal typology adopted for the EUROSION project in the scoping study, the case study area can be described as a combination of: 1b. Hard rock coastal plains Hard rock sandstone cliffs and limestone steps 2. Soft rock coasts Moraine coastal bluffs 3b. Wave-dominated sediment. Plains. Silty, sandy, gravel, pebble and boulder beaches Fig. 1: Location of the case area. Within these major coastal types several coastal formations and habitats occur, including bare sandy, gravel and pebble-boulder beaches, vegetated shores and windflats. The waterfront of the Tallinn city mostly presents a developed artificial coastline. 2 EUROSION Case Study 1.1.2 Geology Recent geological history of the case area since the recession of the continental ice cap (ca.