Programmable Logic Arrays
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

EP Activity Report 2014
EUROPRACTICE IC SERVICE THE RIGHT COCKTAIL OF ASIC SERVICES EUROPRACTICE IC SERVICE OFFERS YOU A PROVEN ROUTE TO ASICS THAT FEATURES: • Low-cost ASIC prototyping • Flexible access to silicon capacity for small and medium volume production quantities • Partnerships with leading world-class foundries, assembly and testhouses • Wide choice of IC technologies • Distribution and full support of high-quality cell libraries and design kits for the most popular CAD tools • RTL-to-Layout service for deep-submicron technologies • Front-end ASIC design through Alliance Partners Industry is rapidly discovering the benefits of using the EUROPRACTICE IC service to help bring new product designs to market quickly and cost-effectively. The EUROPRACTICE ASIC route supports especially those companies who don’t need always the full range of services or high production volumes. Those companies will gain from the flexible access to silicon prototype and production capacity at leading foundries, design services, high quality support and manufacturing expertise that includes IC manufacturing, packaging and test. This you can get all from EUROPRACTICE IC service, a service that is already established for 20 years in the market. THE EUROPRACTICE IC SERVICES ARE OFFERED BY THE FOLLOWING CENTERS: • imec, Leuven (Belgium) • Fraunhofer-Institut fuer Integrierte Schaltungen (Fraunhofer IIS), Erlangen (Germany) This project has received funding from the European Union’s Seventh Programme for research, technological development and demonstration under grant agreement N° 610018. This funding is exclusively used to support European universities and research laboratories. By courtesy of imec FOREWORD Dear EUROPRACTICE customers, Time goes on. A year passes very quickly and when we look around us we see a tremendous rapidly changing world. -
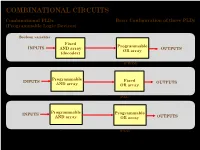
COMBINATIONAL CIRCUITS Combinational Plds Basic Configuration of Three Plds (Programmable Logic Devices)
COMBINATIONAL CIRCUITS Combinational PLDs Basic Configuration of three PLDs (Programmable Logic Devices) Boolean variables Fixed Programmable INPUTS AND array OUTPUTS OR array (decoder) Programmable Read-Only Memory (PROM) Programmable INPUTS Fixed OUTPUTS AND array OR array Programmable Array Logic (PAL) Programmable INPUTS Programmable AND array OR array OUTPUTS (Field) Programmable Logic Array (PLA) 1 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs Two-level AND-OR Arrays (Programmable Logic Devices) F (C,B, A) = CBA + CB A A AND B + V B C A C B F C F AND F + V 1 B OR C Multiple functions Simplified equivalent circuit for two-level AND-OR array 2 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs Field-programmable AND and OR Arrays (Programmable Logic Devices) Field-programmable logic elements are devices that contain uncommitted AND/OR arrays that are (programmed) configured by the designer. + V + V A A F (C,B, A) F (C,B, A) = CBA B B C C Unprogrammed AND array Fuse can be "blown" by passing a high current through it. 3 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs Field-programmable AND and OR Arrays (Programmable Logic Devices) F (P1 ,P2 ,P3 ) = P1 + P3 P1 P1 P2 P2 P3 P3 F F (P1 ,P2 ,P3 ) Unprogrammed OR array Programmed OR array P1 P2 P3 P1 + P3 4 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs Output Polarity Options (Programmable Logic Devices) I1 Ik Active high Active low Complementary outputs Programmable polarity P P 1 m + V 5 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs Bidirectional Pins and Feed back Lines (Programmable Logic Devices) I1 Ik Feedback IOm Three-state driver 6 ©Loberg COMBINATIONAL CIRCUITS Combinational PLDs PLA (Programmable Logic Array) (Programmable Logic Devices) If we use ROM to implement the Boolean function we will waste the silicon area. -

Development of a Programmable Array Logic
i DEVELOPMENT OF A PROGRAMMABLE ARRAY LOGIC PROGRAMMER USING A HOME COMPUTER by GERT DANIEL JORDAAN Dissertation submitted in compliance with the requirements for the MASTER'S DIPLOMA in TECHNOLOGY in the Department of Electronics at the TECHNIKON O. F . S . OCTOBER, 1988. Supervisor: Prof. F.W. Bruwer Co-supervisor: Mr. B. de Witt © Central University of Technology, Free State ACKNOWLEDGEMENTS I would like to thank the following persons without whose help this project could hardly have been completed: The supervisor, prof. F.W. Bruwer, and co-supervisor, mr. 8. de Witt, for help and guidance during the course of the project. Mr. H.F. Coetzer for technical as well as philolog ical assistance. It is really appreciated that time could be found in his very full schedule, for this assistance. Dr. C.A.J. van Rensburg for his per_onal interest in the research project and for continuous encouragement and help. Dr. J. van der Mer-we for his assistance - in particular with respect to the registration and other administrative aspects of the project. / Miss M. du Toit who was largely responsible for the word processing. For the guidance provided by my parents and the opportuni- ties which they afforded me. My children, Tania, Johan, Madelie and Lourens,. whose main contribution was to have to forego much of my attention and time for such a long period. Last, but not least, my wife, Christa, for her encouragement and understanding. © Central University of Technology,ii Free State CONTENTS PAGE Cilapter 1 1 Intr--oduc tion 1.1 Recent Trends in Electronics 1 1.2 Problem Investigated 1 1.3 Development of PAL Programmer 3 1.3.1 Generation of Fuse Map 3 1.3.2 Programming of Programmable Array Logic 3 Devices 1 . -

VLSI Design: a New Approach
International Journal of Information Theory Volume 1, Issue 1, 2011, pp-01-04 Available online at: http://www.bioinfo.in/contents.php?id=103 VLSI Design: A New Approach M.B. Swami and V.P. Pawar Department of Physics/Electronics/Computer Science, Maharashtra Udyagiri Mahavidyalaya, Udgir, India e-mail: [email protected] Abstract—This paper presents the different • Cores such as PCI are available and able to Programmable Logic Array is an important building circuit integrate with relative ease Getting started in of VLSI chips and some of the FPGA architectures have FPGA design is easy. evolved from the basic Programmable Logic Array The tools are cheap (and sometimes free) for low- architectures. In this paper the new concepts of Verilog Hardware Description language is included in VLSI Design. end devices and affordable for the high end. Modern Keywords: Programmable Logic Array, FPGA, Verilog. HDL (hardware design language) environments are very powerful for creating and verifying a design. There I. INTRODUCTION is plenty of documentation available for using different vendor’s FPGA design tools and exploiting features of Very-large-scale integration (VLSI) is the process of different FPGAs. creating integrated circuits by combining thousands of Even with modern tools, the fundamentals of transistor-based circuits into a single chip. digital design still remain intact and must be Implementation is based on FPGA design flow with understood. If the fundamentals are ignored, there is a Xilinx tools which will help you to design complex good chance that your design will not work consistently digital systems using HDL and also to get experience of and will probably exhibit intermittent modes of processor and controller implementations on FPGAs. -

I/O Design and Core Power Management Issues in Heterogeneous Multi/Many-Core System-On-Chip
UNIVERSITY OF CALIFORNIA, IRVINE I/O Design and Core Power Management Issues in Heterogeneous Multi/Many-Core System-on-Chip DISSERTATION submitted in partial satisfaction of the requirements for the degree of DOCTOR OF PHILOSOPHY in Computer Science by Myoung-Seo Kim Dissertation Committee: Professor Jean-Luc Gaudiot, Chair Professor Alexandru Nicolau, Co-Chair Professor Alexander Veidenbaum 2016 c 2016 Myoung-Seo Kim DEDICATION To my father and mother, Youngkyu Kim and Heesook Park ii TABLE OF CONTENTS Page LIST OF FIGURES vi LIST OF TABLES viii ACKNOWLEDGMENTS ix CURRICULUM VITAE x ABSTRACT OF THE DISSERTATION xv I DESIGN AUTOMATION FOR CONFIGURABLE I/O INTERFACE CONTROL BLOCK 1 1 Introduction 2 2 Related Work 4 3 Structure of Generic Pin Control Block 6 4 Specification with Formalized Text 9 4.1 Formalized Text . 9 4.2 Specific Functional Requirement . 11 4.3 Composition of Registers . 11 5 Experiment Results 18 6 Conclusions 24 II SPEED UP MODEL BY OVERHEAD OF DATA PREPARATION 26 7 Introduction 27 8 Reconsidering Speedup Model by Overhead of Data Preparation (ODP) 29 iii 9 Case Studies of Our Enhanced Amdahl's Law Speedup Model 33 9.1 Homogeneous Symmetric Multicore . 33 9.2 Homogeneous Asymmetric Multicore . 35 9.3 Homogeneous Dynamic Multicore . 36 9.4 Heterogeneous CPU-GPU Multicore . 39 9.5 Heterogeneous Dynamic CPU-GPU Multicore . 41 10 Conclusions 43 III EFFICIENT CORE POWER CONTROL SCHEME 44 11 Introduction 45 12 Related Work 47 13 Architecture 51 13.1 Heterogeneous Many-Core System . 51 13.2 Discrete L2 Cache Memory Model . 52 14 3-Bit Power Control Scheme 55 14.1 Active Status . -
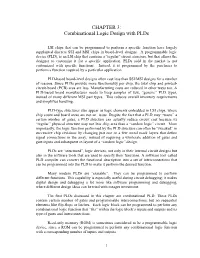
CHAPTER 3: Combinational Logic Design with Plds
CHAPTER 3: Combinational Logic Design with PLDs LSI chips that can be programmed to perform a specific function have largely supplanted discrete SSI and MSI chips in board-level designs. A programmable logic device (PLD), is an LSI chip that contains a “regular” circuit structure, but that allows the designer to customize it for a specific application. PLDs sold in the market is not customized with specific functions. Instead, it is programmed by the purchaser to perform a function required by a particular application. PLD-based board-level designs often cost less than SSI/MSI designs for a number of reasons. Since PLDs provide more functionality per chip, the total chip and printed- circuit-board (PCB) area are less. Manufacturing costs are reduced in other ways too. A PLD-based board manufacturer needs to keep samples of few, “generic” PLD types, instead of many different MSI part types. This reduces overall inventory requirements and simplifies handling. PLD-type structures also appear as logic elements embedded in LSI chips, where chip count and board areas are not an issue. Despite the fact that a PLD may “waste” a certain number of gates, a PLD structure can actually reduce circuit cost because its “regular” physical structure may use less chip area than a “random logic” circuit. More importantly, the logic function performed by the PLD structure can often be “tweaked” in successive chip revisions by changing just one or a few metal mask layers that define signal connections in the array, instead of requiring a wholesale addition of gates and gate inputs and subsequent re-layout of a “random logic” design. -
Introduction to ASIC Design
’14EC770 : ASIC DESIGN’ An Introduction Application - Specific Integrated Circuit Dr.K.Kalyani AP, ECE, TCE. 1 VLSI COMPANIES IN INDIA • Motorola India – IC design center • Texas Instruments – IC design center in Bangalore • VLSI India – ASIC design and FPGA services • VLSI Software – Design of electronic design automation tools • Microchip Technology – Offers VLSI CMOS semiconductor components for embedded systems • Delsoft – Electronic design automation, digital video technology and VLSI design services • Horizon Semiconductors – ASIC, VLSI and IC design training • Bit Mapper – Design, development & training • Calorex Institute of Technology – Courses in VLSI chip design, DSP and Verilog HDL • ControlNet India – VLSI design, network monitoring products and services • E Infochips – ASIC chip design, embedded systems and software development • EDAIndia – Resource on VLSI design centres and tutorials • Cypress Semiconductor – US semiconductor major Cypress has set up a VLSI development center in Bangalore • VDAT 2000 – Info on VLSI design and test workshops 2 VLSI COMPANIES IN INDIA • Sandeepani – VLSI design training courses • Sanyo LSI Technology – Semiconductor design centre of Sanyo Electronics • Semiconductor Complex – Manufacturer of microelectronics equipment like VLSIs & VLSI based systems & sub systems • Sequence Design – Provider of electronic design automation tools • Trident Techlabs – Power systems analysis software and electrical machine design services • VEDA IIT – Offers courses & training in VLSI design & development • Zensonet Technologies – VLSI IC design firm eg3.com – Useful links for the design engineer • Analog Devices India Product Development Center – Designs DSPs in Bangalore • CG-CoreEl Programmable Solutions – Design services in telecommunications, networking and DSP 3 Physical Design, CAD Tools. • SiCore Systems Pvt. Ltd. 161, Greams Road, ... • Silicon Automation Systems (India) Pvt. Ltd. ( SASI) ... • Tata Elxsi Ltd. -
EP Activity Report 2015
EUROPRACTICE IC SERVICE THE RIGHT COCKTAIL OF ASIC SERVICES EUROPRACTICE IC SERVICE OFFERS YOU A PROVEN ROUTE TO ASICS THAT FEATURES: · .QYEQUV#5+%RTQVQV[RKPI · (NGZKDNGCEEGUUVQUKNKEQPECRCEKV[HQTUOCNNCPFOGFKWOXQNWOGRTQFWEVKQPSWCPVKVKGU · 2CTVPGTUJKRUYKVJNGCFKPIYQTNFENCUUHQWPFTKGUCUUGODN[CPFVGUVJQWUGU · 9KFGEJQKEGQH+%VGEJPQNQIKGU · &KUVTKDWVKQPCPFHWNNUWRRQTVQHJKIJSWCNKV[EGNNNKDTCTKGUCPFFGUKIPMKVUHQTVJGOQUVRQRWNCT%#&VQQNU · 46.VQ.C[QWVUGTXKEGHQTFGGRUWDOKETQPVGEJPQNQIKGU · (TQPVGPF#5+%FGUKIPVJTQWIJ#NNKCPEG2CTVPGTU +PFWUVT[KUTCRKFN[FKUEQXGTKPIVJGDGPG«VUQHWUKPIVJG'74124#%6+%'+%UGTXKEGVQJGNRDTKPIPGYRTQFWEVFGUKIPUVQOCTMGV SWKEMN[CPFEQUVGHHGEVKXGN[6JG'74124#%6+%'#5+%TQWVGUWRRQTVUGURGEKCNN[VJQUGEQORCPKGUYJQFQP°VPGGFCNYC[UVJG HWNNTCPIGQHUGTXKEGUQTJKIJRTQFWEVKQPXQNWOGU6JQUGEQORCPKGUYKNNICKPHTQOVJG¬GZKDNGCEEGUUVQUKNKEQPRTQVQV[RGCPF RTQFWEVKQPECRCEKV[CVNGCFKPIHQWPFTKGUFGUKIPUGTXKEGUJKIJSWCNKV[UWRRQTVCPFOCPWHCEVWTKPIGZRGTVKUGVJCVKPENWFGU+% OCPWHCEVWTKPIRCEMCIKPICPFVGUV6JKU[QWECPIGVCNNHTQO'74124#%6+%'+%UGTXKEGCUGTXKEGVJCVKUCNTGCF[GUVCDNKUJGF HQT[GCTUKPVJGOCTMGV THE EUROPRACTICE IC SERVICES ARE OFFERED BY THE FOLLOWING CENTERS: · KOGE.GWXGP $GNIKWO · (TCWPJQHGT+PUVKVWVHWGT+PVGITKGTVG5EJCNVWPIGP (TCWPJQHGT++5 'TNCPIGP )GTOCP[ This project has received funding from the European Union’s Seventh Programme for research, technological development and demonstration under grant agreement N° 610018. This funding is exclusively used to support European universities and research laboratories. © imec FOREWORD Dear EUROPRACTICE customers, We are at the start of the -

The Basics of Logic Design
C APPENDIX The Basics of Logic Design C.1 Introduction C-3 I always loved that C.2 Gates, Truth Tables, and Logic word, Boolean. Equations C-4 C.3 Combinational Logic C-9 Claude Shannon C.4 Using a Hardware Description IEEE Spectrum, April 1992 Language (Shannon’s master’s thesis showed that C-20 the algebra invented by George Boole in C.5 Constructing a Basic Arithmetic Logic the 1800s could represent the workings of Unit C-26 electrical switches.) C.6 Faster Addition: Carry Lookahead C-38 C.7 Clocks C-48 AAppendixC-9780123747501.inddppendixC-9780123747501.indd 2 226/07/116/07/11 66:28:28 PPMM C.8 Memory Elements: Flip-Flops, Latches, and Registers C-50 C.9 Memory Elements: SRAMs and DRAMs C-58 C.10 Finite-State Machines C-67 C.11 Timing Methodologies C-72 C.12 Field Programmable Devices C-78 C.13 Concluding Remarks C-79 C.14 Exercises C-80 C.1 Introduction This appendix provides a brief discussion of the basics of logic design. It does not replace a course in logic design, nor will it enable you to design signifi cant working logic systems. If you have little or no exposure to logic design, however, this appendix will provide suffi cient background to understand all the material in this book. In addition, if you are looking to understand some of the motivation behind how computers are implemented, this material will serve as a useful intro- duction. If your curiosity is aroused but not sated by this appendix, the references at the end provide several additional sources of information. -

RESEARCH INSIGHTS – Hardware Design: FPGA Security Risks
RESEARCH INSIGHTS Hardware Design: FPGA Security Risks www.nccgroup.trust CONTENTS Author 3 Introduction 4 FPGA History 6 FPGA Development 10 FPGA Security Assessment 12 Conclusion 17 Glossary 18 References & Further Reading 19 NCC Group Research Insights 2 All Rights Reserved. © NCC Group 2015 AUTHOR DUNCAN HURWOOD Duncan is a senior consultant at NCC Group, specialising in telecom, embedded systems and application review. He has over 18 years’ experience within the telecom and security industry performing almost every role within the software development cycle from design and development to integration and product release testing. A dedicated security assessor since 2010, his consultancy experience includes multiple technologies, languages and platforms from web and mobile applications, to consumer devices and high-end telecom hardware. NCC Group Research Insights 3 All Rights Reserved. © NCC Group 2015 GLOSSARY AES Advanced encryption standard, a cryptography OTP One time programmable, allowing write once cipher only ASIC Application-specific integrated circuit, non- PCB Printed circuit board programmable hardware logic chip PLA Programmable logic array, forerunner of FPGA Bitfile Binary instruction file used to program FPGAs technology CLB Configurable logic block, an internal part of an PUF Physically unclonable function FPGA POWF Physical one-way function CPLD Complex programmable logic device PSoC Programmable system on chip, an FPGA and EEPROM Electronically erasable programmable read- other hardware on a single chip only memory -

Concepmon ( G ~ E Janvier
CONCEPMONET MISE EN CE= D'UN SYST~MEDE RECONFIOURATION DYNAMIQUE PRESENTE EN VUE DE L'OBTENTION DU DIP~MEDE WSERs SCIENCES APPLIQUEES (G~EÉLE~QUE) JANVIER2000 OCynthia Cousineau, 2000. National Library Bibliothèque nationale I*I of Canada du Canada Acquisitions and Acquisitions et Bibliographie Services services bibliographiques 395 Wellington Street 395, rue Wellington OttawaON K1AON4 Ottawa ON K1A ON4 Canada Canada The author has granted a non- L'auteur a accordé une licence non exclusive licence allowing the exclusive permettant à la National Library of Canada to Bibliothèque nationale du Canada de reproduce, loan, distribute or sel1 reproduire, prêter, distribuer ou copies of this thesis in microform, vendre des copies de cette thèse sous paper or electronic formats. la forme de microfiche/film, de reproduction sur papier ou sur format électronique. The author retains ownership of the L'auteur conserve la propriété du copyright in this thesis. Neither the droit d'auteur qui protège cette thèse. thesis nor substantial extracts f?om it Ni la thèse ni des extraits substantiels may be printed or otherwise de celle-ci ne doivent être imprimés reproduced without the author's ou autrement reproduits sans son permission. autorisation. Ce mémoire intitulé: CONCEFMONET MISE EN OEWRE D'UN SYST&MEDE RECONFIGURATION DYNAMIQUE présenté par : COUSINEAU Cvnthia en vue de l'obtention du diplôme de : Maîtrise ès sciences amliauees a été dûment accepté par le jury d'examen constitué de: M. BOIS GUY, Ph.D., président M. SAVARIA Yvon, Ph.D., membre et directeur de recherche M. SAWAN Mohamad , Ph.D., membre et codirecteur de recherche M. -

Review of FPD's Languages, Compilers, Interpreters and Tools
ISSN 2394-7314 International Journal of Novel Research in Computer Science and Software Engineering Vol. 3, Issue 1, pp: (140-158), Month: January-April 2016, Available at: www.noveltyjournals.com Review of FPD'S Languages, Compilers, Interpreters and Tools 1Amr Rashed, 2Bedir Yousif, 3Ahmed Shaban Samra 1Higher studies Deanship, Taif university, Taif, Saudi Arabia 2Communication and Electronics Department, Faculty of engineering, Kafrelsheikh University, Egypt 3Communication and Electronics Department, Faculty of engineering, Mansoura University, Egypt Abstract: FPGAs have achieved quick acceptance, spread and growth over the past years because they can be applied to a variety of applications. Some of these applications includes: random logic, bioinformatics, video and image processing, device controllers, communication encoding, modulation, and filtering, limited size systems with RAM blocks, and many more. For example, for video and image processing application it is very difficult and time consuming to use traditional HDL languages, so it’s obligatory to search for other efficient, synthesis tools to implement your design. The question is what is the best comparable language or tool to implement desired application. Also this research is very helpful for language developers to know strength points, weakness points, ease of use and efficiency of each tool or language. This research faced many challenges one of them is that there is no complete reference of all FPGA languages and tools, also available references and guides are few and almost not good. Searching for a simple example to learn some of these tools or languages would be a time consuming. This paper represents a review study or guide of almost all PLD's languages, interpreters and tools that can be used for programming, simulating and synthesizing PLD's for analog, digital & mixed signals and systems supported with simple examples.