Solar Sails: Modeling, Estimation, and Trajectory Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
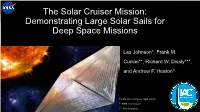
The Solar Cruiser Mission: Demonstrating Large Solar Sails for Deep Space Missions
The Solar Cruiser Mission: Demonstrating Large Solar Sails for Deep Space Missions Les Johnson*, Frank M. Curran**, Richard W. Dissly***, and Andrew F. Heaton* * NASA Marshall Space Flight Center ** MZBlue Aerospace NASA Image *** Ball Aerospace Solar Sails Derive Propulsion By Reflecting Photons Solar sails use photon “pressure” or force on thin, lightweight, reflective sheets to produce thrust. NASA Image 2 Solar Sail Missions Flown (as of October 2019) NanoSail-D (2010) IKAROS (2010) LightSail-1 (2015) CanX-7 (2016) InflateSail (2017) NASA JAXA The Planetary Society Canada EU/Univ. of Surrey Earth Orbit Interplanetary Earth Orbit Earth Orbit Earth Orbit Deployment Only Full Flight Deployment Only Deployment Only Deployment Only 3U CubeSat 315 kg Smallsat 3U CubeSat 3U CubeSat 3U CubeSat 10 m2 196 m2 32 m2 <10 m2 10 m2 3 Current and Planned Solar Sail Missions CU Aerospace (2018) LightSail-2 (2019) Near Earth Asteroid Solar Cruiser (2024) Univ. Illinois / NASA The Planetary Society Scout (2020) NASA NASA Earth Orbit Earth Orbit Interplanetary L-1 Full Flight Full Flight Full Flight Full Flight In Orbit; Not yet In Orbit; Successful deployed 6U CubeSat 90 Kg Spacecraft 3U CubeSat 86 m2 >1200 m2 3U CubeSat 32 m2 20 m2 4 Near Earth Asteroid Scout The Near Earth Asteroid Scout Will • Image/characterize a NEA during a slow flyby • Demonstrate a low cost asteroid reconnaissance capability Key Spacecraft & Mission Parameters • 6U cubesat (20cm X 10cm X 30 cm) • ~86 m2 solar sail propulsion system • Manifested for launch on the Space Launch System (Artemis 1 / 2020) • 1 AU maximum distance from Earth Leverages: combined experiences of MSFC and JPL Close Proximity Imaging Local scale morphology, with support from GSFC, JSC, & LaRC terrain properties, landing site survey Target Reconnaissance with medium field imaging Shape, spin, and local environment NEA Scout Full Scale EDU Sail Deployment 6 Solar Cruiser Mission Concept Mission Profile Solar Cruiser may launch as a secondary payload on the NASA IMAP mission in October, 2024. -
Some Basic Response Felations for Reaction
SOME BASIC RESPONSE FELATIONS FOR REACTION-WHEEL ATTITUDE CONTROL Robert H. Cannon, Jr. Stanford University SOME BASIC FESPONSE RELATIONS * FOR FEACTION-WHEEL ATTITUDE CONTROL ** Robert H. Cannon, Jr. In many space vehicles, attitude control is best accomplished with combination systems using reaction wheels for momentum exchange and storage, plus jets for periodic momentum expulsion. Design of the reaction-wheel control involves evaluating the time history of system response to disturbances, many of which are either sinusoidal or impul- sive As an aid to such evaluation, this paper developes basic response relations--vehicle attitude, control torque, wheel motion, mechanical power, and energy consumption--for a vehicle subjected to both types of disturbance. Limiting values are calculated, assuming no standby losses. (The possibility of exchanging momentum with minimum energy loss is dis- cussed. ) The resulting normalized numerical relations are intended to li serve as an order-of magnitude basis for preliminary design estimates (r ‘.* and comparisons. c The response relations are derived first for a single-axis model. 2. Then their applicability to three-axis design is discussed. A control system is postulated which decouples vehicle dynamics so that vehicle motions are exactly single axis. (Some advantages of such control are discussed in References (2) and (3).) T’le resulting control-wheel motions may be complicated by gyroscopic coupling due to the spinning wheels. In control to a rotating reference extra power is consumed also because the spin momentum of the roll and yaw wheels must be passed back and forth from one to the other., Control systems which merely damp the natural motions of stable, local-vertical satellites can be smaller and simpler and use less power but, of course, furnish less precise control. -

Managing Momentum on the Dawn Low Thrust Mission. Brett A
Managing Momentum on the Dawn Low Thrust Mission. Brett A. Smith, Charles A. Vanelli, and Edward R. Swenka Jet Propulsion Laboratory, California Institute of Technology, Pasadena, CA 91109 [email protected], [email protected], [email protected] Abstract—Dawn is low-thrust interplanetary spacecraft en- 1. INTRODUCTION route to the asteroids Vesta and Ceres in an effort to better un- Dawn is NASA’s ninth Discovery class mission on a journey derstand the early creation of the solar system. After launch to orbit two asteroids in the region between Mars and Jupiter. in September 2007, the spacecraft will flyby Mars in February Scientists believe the asteroid belt provides similar conditions 2009 before arriving at Vesta in summer of 2011 and Ceres in as those found during the formation of Earth. Dawn will in- early 2015. Three solar electric ion-propulsion engines are vestigate Vesta and Ceres, which are two of the larger objects used to provide the primary thrust for the Dawn spacecraft. in the region, and each provides a unique view into the forma- Ion engines produce a very small but very efficient force, and tion of planet like objects. The Dawn mission is also unique therefore must be thrusting almost continuously to realize the as it will be the first spacecraft to orbit two extraterrestrial necessary change in velocity to reach Vesta and Ceres. planetary bodies [1]. Momentum must be carefully managed to ensure the space- Launching on September 27, 2007, the Dawn spacecraft be- craft has enough control authority to perform necessary turns gan its 8-year journey. -

Characterization of Cubesat Reaction Wheel
Shields, J. et al. (2017): JoSS, Vol. 6, No. 1, pp. 565–580 (Peer-reviewed article available at www.jossonline.com) www.DeepakPublishing.com www. JoSSonline.com Characterization of CubeSat Reaction Wheel Assemblies Joel Shields, Christopher Pong, Kevin Lo, Laura Jones, Swati Mohan, Chava Marom, Ian McKinley, William Wilson and Luis Andrade Jet Propulsion Laboratory, California Institute of Technology Pasadena, California Abstract This paper characterizes three different CubeSat reaction wheel assemblies, using measurements from a six- axis Kistler dynamometer. Two reaction wheels from Blue Canyon Technologies (BCT) with momentum capac- ities of 15 and 100 milli-N-m-s, and one wheel from Sinclair Interplanetary with 30 milli-N-m-s were tested. Each wheel was tested throughout its specified wheel speed range, in 50 RPM increments. Amplitude spectrums out to 500 Hz were obtained for each wheel speed. From this data, the static and dynamic imbalances were calculated, as well as the harmonic coefficients and harmonic amplitudes. This data also revealed the various structural cage modes of each wheel and the interaction of the harmonics with these modes, which is important for disturbance modeling. Empirical time domain models of the exported force and torque for each wheel were constructed from water- fall plots. These models can be used as part of pointing simulations to predict CubeSat pointing jitter, which is currently of keen interest to the small satellite community. Analysis of the ASTERIA mission shows that the reaction wheels produce a jitter of approximately 0.1 arcsec RMS about the payload tip/tilt axes. Under the worst- case conditions of three wheels hitting a lightly damped structural resonance, the jitter can be as large as 8 arcsec RMS about the payload roll axis, which is of less importance than the other two axes. -

Astronomy 2008 Index
Astronomy Magazine Article Title Index 10 rising stars of astronomy, 8:60–8:63 1.5 million galaxies revealed, 3:41–3:43 185 million years before the dinosaurs’ demise, did an asteroid nearly end life on Earth?, 4:34–4:39 A Aligned aurorae, 8:27 All about the Veil Nebula, 6:56–6:61 Amateur astronomy’s greatest generation, 8:68–8:71 Amateurs see fireballs from U.S. satellite kill, 7:24 Another Earth, 6:13 Another super-Earth discovered, 9:21 Antares gang, The, 7:18 Antimatter traced, 5:23 Are big-planet systems uncommon?, 10:23 Are super-sized Earths the new frontier?, 11:26–11:31 Are these space rocks from Mercury?, 11:32–11:37 Are we done yet?, 4:14 Are we looking for life in the right places?, 7:28–7:33 Ask the aliens, 3:12 Asteroid sleuths find the dino killer, 1:20 Astro-humiliation, 10:14 Astroimaging over ancient Greece, 12:64–12:69 Astronaut rescue rocket revs up, 11:22 Astronomers spy a giant particle accelerator in the sky, 5:21 Astronomers unearth a star’s death secrets, 10:18 Astronomers witness alien star flip-out, 6:27 Astronomy magazine’s first 35 years, 8:supplement Astronomy’s guide to Go-to telescopes, 10:supplement Auroral storm trigger confirmed, 11:18 B Backstage at Astronomy, 8:76–8:82 Basking in the Sun, 5:16 Biggest planet’s 5 deepest mysteries, The, 1:38–1:43 Binary pulsar test affirms relativity, 10:21 Binocular Telescope snaps first image, 6:21 Black hole sets a record, 2:20 Black holes wind up galaxy arms, 9:19 Brightest starburst galaxy discovered, 12:23 C Calling all space probes, 10:64–10:65 Calling on Cassiopeia, 11:76 Canada to launch new asteroid hunter, 11:19 Canada’s handy robot, 1:24 Cannibal next door, The, 3:38 Capture images of our local star, 4:66–4:67 Cassini confirms Titan lakes, 12:27 Cassini scopes Saturn’s two-toned moon, 1:25 Cassini “tastes” Enceladus’ plumes, 7:26 Cepheus’ fall delights, 10:85 Choose the dome that’s right for you, 5:70–5:71 Clearing the air about seeing vs. -

Development and Validation of Empirical and Analytical Reaction Wheel Disturbance Models by Rebecca A
Development and Validation of Empirical and Analytical Reaction Wheel Disturbance Models by Rebecca A. Masterson S.B. Mechanical Engineering (1997) Massachusetts Institute of Technology Submitted to the Department of Mechanical Engineering in partial fulfillment of the requirements for the degree of Master of Science in Mechanical Engineering at the MASSACHUSETTS INSTITUTE OF TECHNOLOGY June 1999 @ Massachusetts Institute of Technology 1999. All rights reserved. A uthor .. .. .............................. A r Department of Mechanical Engineering May 24, 1999 C ertified by ......... ................................... David W. Miller Associate Professor Thesis Supervisor C ertified by ................................ Warren P. Seering Professor/Director Departmental Reader A ccepted by .............. .. .................. Am A. Sonin Chairman, Department Committee on Graduate Students pg 999 ENG LIBRARIES 2 Development and Validation of Empirical and Analytical Reaction Wheel Disturbance Models by Rebecca A. Masterson Submitted to the Department of Mechanical Engineering on May 24, 1999, in partial fulfillment of the requirements for the degree of Master of Science in Mechanical Engineering Abstract Accurate disturbance models are necessary to predict the effects of vibrations on the perfor- mance of precision space-based telescopes, such as the Space Interferometry Mission (SIM) and the Next-Generation Space Telescope (NGST). There are many possible disturbance sources on such a spacecraft, but the reaction wheel assembly (RWA) is anticipated to be the largest. This thesis presents three types of reaction wheel disturbance models. The first is a steady-state empirical model that was originally created based on RWA vibration data from the Hubble Space Telescope (HST) wheels. The model assumes that the disturbances consist of discrete harmonics of the wheel speed with amplitudes proportional to the wheel speed squared. -

Orbit Transfer Problems and the Results You Obtained
MS&E 315 and CME 304 Solar sailing between Earth and Mars 1 Overview In this project, you will use your knowledge of nonlinear optimization to help a space agency design a cargo mission. The mission consists of making a cargo spacecraft perform interplanetary orbit transfers between Earth and Mars, and the agency is considering using a solar sail to propel the spacecraft. They need you to determine how the spacecraft should be operated to perform these orbit transfers in the shortest possible time for different solar sail technologies. 2 Mission information 2.1 Simplifications The agency has determined that the following simplifications are acceptable for your analysis: 1. Orbits are heliocentric, circular and co-planar. 2. Gravitational effects due to celestial bodies other than the Sun are ignored. 3. The Sun and spacecraft are modeled as point masses. 4. The Sun has spherically symmetric gravitational and radiation fields. 2.2 Problem description The problem you have to solve consists of determining how the solar sail of the spacecraft should be oriented to make the spacecraft perform each of the interplanetary orbit transfers Earth-Mars and Mars-Earth in the shortest possible time. You have to perform this analysis for some, say three, of the available solar sail technologies so that the agency can choose the most appropriate one in terms of cost and performance. Each solar sail technology is identified by a characteristic acceleration, as described in the next subsection. Figure1 shows a diagram of the orbits of interest, where rE and !E denote the radius and angular velocity, respectively, of Earth's orbit around the Sun, and rM and !M denote the radius and angular velocity, respectively, of Mars's orbit around the Sun. -

Hybrid Solar Sails for Active Debris Removal Final Report
HybridSail Hybrid Solar Sails for Active Debris Removal Final Report Authors: Lourens Visagie(1), Theodoros Theodorou(1) Affiliation: 1. Surrey Space Centre - University of Surrey ACT Researchers: Leopold Summerer Date: 27 June 2011 Contacts: Vaios Lappas Tel: +44 (0) 1483 873412 Fax: +44 (0) 1483 689503 e-mail: [email protected] Leopold Summerer (Technical Officer) Tel: +31 (0)71 565 4192 Fax: +31 (0)71 565 8018 e-mail: [email protected] Ariadna ID: 10-6411b Ariadna study type: Standard Contract Number: 4000101448/10/NL/CBi Available on the ACT website http://www.esa.int/act Abstract The historical practice of abandoning spacecraft and upper stages at the end of mission life has resulted in a polluted environment in some earth orbits. The amount of objects orbiting the Earth poses a threat to safe operations in space. Studies have shown that in order to have a sustainable environment in low Earth orbit, commonly adopted mitigation guidelines should be followed (the Inter-Agency Space Debris Coordination Committee has proposed a set of debris mitigation guidelines and these have since been endorsed by the United Nations) as well as Active Debris Removal (ADR). HybridSail is a proposed concept for a scalable de-orbiting spacecraft that makes use of a deployable drag sail membrane and deployable electrostatic tethers to accelerate orbital decay. The HybridSail concept consists of deployable sail and tethers, stowed into a nano-satellite package. The nano- satellite, deployed from a mothership or from a launch vehicle will home in towards the selected piece of space debris using a small thruster-propulsion firing and magnetic attitude control system to dock on the debris. -

Propulsion Systems for Interstellar Exploration
The Future of Electric Propulsion: A Young Visionary Paper Competition 35th International Electric Propulsion Conference October 8-12, 2017 Atlanta, Georgia Propulsion Systems for Interstellar Exploration Steven L. Magnusen Embry-Riddle Aeronautical University, Daytona Beach, FL, USA Alfredo D. Tuesta∗ National Research Council Postdoctoral Associate, Washington, DC, USA [email protected] August 4, 2017 Abstract The idea of manned spaceships exploring nearby star systems, although difficult and unlikely in this generation or the next, is becoming less a tale of science fiction and more a concept of rigorous scientific interest. In 2003, NASA sent two rovers to Mars and returned images and data that would change our view of the planet forever. Already, scientists and engineers are proposing concepts for manned missions to the Red Planet. As we prepare to visit the planets in our solar system, we dare to explore the possibilities and venues to travel beyond. With NASA’s count of known exoplanets now over 3,000 and growing, interest in interstellar science is being renewed as well. In this work, the authors discuss the benefits and deficiencies of current and emerging technologies in electric propulsion for outer planet and extrasolar exploration and propose innovative and daring concepts to further the limits of present engineering. The topics covered include solar and electric sails and beamed energy as propulsion systems. I. Introduction Te Puke is the name for the voyaging canoe that the Polynesians developed to sail across vast distances in the Pacific Ocean at the turn of the first millennium. This primitive yet sophisticated canoe, made of two hollowed out tree trunks and crab claw sails woven together from leaves, allowed Polynesian sailors to navigate the open ocean by studying the stars. -

Preparation of Papers for AIAA Journals
An Overview of Solar Sail Propulsion within NASA Les Johnson1 NASA George C. Marshall Space Flight Center, Huntsville, AL 35812, USA Grover A. Swartzlander2 Rochester Institute of Technology, Rochester, NY 14623 and Alexandra Artusio-Glimpse 3 Rochester Institute of Technology, Rochester, NY 14623 Solar Sail Propulsion (SSP) is a high-priority new technology within The National Aeronautics and Space Administration (NASA), and several potential future space missions have been identified that will require SSP. Small and mid-sized technology demonstration missions using solar sails have flown or will soon fly in space. Multiple mission concept studies have been performed to determine the system level SSP requirements for their implementation and, subsequently, to drive the content of relevant technology programs. The status of SSP technology and potential future mission implementation within the United States (US) will be described. Nomenclature V delta-v (change in velocity) AU = astronomical unit g = gravitational (measurement of acceleration felt as weight; a force per unit mass) GeV = giga-electron-volts kg = kilogram L1 = Lagrange point 1 m2 = meters squared I. Introduction Solar Sail Propulsion (SSP) was identified as a high-priority new technology by the Space Studies Board of the National Research Council in their 2012 Heliophysics Decadal Survey [1], and several potential future space 1 Deputy Manager, Advanced Concepts Office, Mail Code ED04, NASA MSFC, Huntsville, AL 35812 2 Associate Professor, Department of Physics, 54 Lomb Memorial Drive, Rochester, NY 14623 3 Graduate Student, Department of Physics, 54 Lomb Memorial Drive, Rochester, NY 14623 missions have been proposed that will require SSP to be achieved. -
Advancing Asteroid Surface Exploration Using Sublimate- Based Regenerative Micropropulsion and 3D Path Planning
Advancing Asteroid Surface Exploration Using Sublimate- Based Regenerative Micropropulsion And 3D Path Planning Item Type text; Electronic Thesis Authors Wilburn, Greg Publisher The University of Arizona. Rights Copyright © is held by the author. Digital access to this material is made possible by the University Libraries, University of Arizona. Further transmission, reproduction, presentation (such as public display or performance) of protected items is prohibited except with permission of the author. Download date 07/10/2021 15:36:40 Link to Item http://hdl.handle.net/10150/636641 ADVANCING ASTEROID SURFACE EXPLORATION USING SUBLIMATE-BASED REGENERATIVE MICROPROPULSION AND 3D PATH PLANNING by Greg Wilburn ____________________________ Copyright © Greg Wilburn 2019 A Thesis Submitted to the Faculty of the DEPARTMENT OF AEROSPACE AND MECHANICAL ENGINEERING In Partial Fulfillment of the Requirements For the Degree of MASTER OF SCIENCE In the Graduate College THE UNIVERSITY OF ARIZONA 2019 Acknowledgements The author would first like to thank his thesis committee members for their help and direction in solving some of the complex problems in this work. The author acknowledges the time and effort of his advisor, Dr. Jekan Thangavelauthum, for his guidance over the entire course of the project. Recognition is deserved for Dr. Erik Asphaug and Dr. Stephen Schwarz for their development of the AMIGO robot concept. The development of MEMS systems presented could not have been done without the coursework and guidance from Dr. Eniko Enikov. Special thanks goes to my friends and family who have supported and encouraged me through my graduate studies. I couldn’t have done it without you, Emilia! 3 Table of Contents I. -

Mars Reconnaissance Orbiter's High Resolution Imaging Science
JOURNAL OF GEOPHYSICAL RESEARCH, VOL. 112, E05S02, doi:10.1029/2005JE002605, 2007 Click Here for Full Article Mars Reconnaissance Orbiter’s High Resolution Imaging Science Experiment (HiRISE) Alfred S. McEwen,1 Eric M. Eliason,1 James W. Bergstrom,2 Nathan T. Bridges,3 Candice J. Hansen,3 W. Alan Delamere,4 John A. Grant,5 Virginia C. Gulick,6 Kenneth E. Herkenhoff,7 Laszlo Keszthelyi,7 Randolph L. Kirk,7 Michael T. Mellon,8 Steven W. Squyres,9 Nicolas Thomas,10 and Catherine M. Weitz,11 Received 9 October 2005; revised 22 May 2006; accepted 5 June 2006; published 17 May 2007. [1] The HiRISE camera features a 0.5 m diameter primary mirror, 12 m effective focal length, and a focal plane system that can acquire images containing up to 28 Gb (gigabits) of data in as little as 6 seconds. HiRISE will provide detailed images (0.25 to 1.3 m/pixel) covering 1% of the Martian surface during the 2-year Primary Science Phase (PSP) beginning November 2006. Most images will include color data covering 20% of the potential field of view. A top priority is to acquire 1000 stereo pairs and apply precision geometric corrections to enable topographic measurements to better than 25 cm vertical precision. We expect to return more than 12 Tb of HiRISE data during the 2-year PSP, and use pixel binning, conversion from 14 to 8 bit values, and a lossless compression system to increase coverage. HiRISE images are acquired via 14 CCD detectors, each with 2 output channels, and with multiple choices for pixel binning and number of Time Delay and Integration lines.