Innovations in Pulsed Plasma Thrusters to Enable Cubesat Science Missions
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
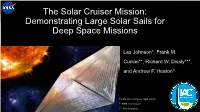
The Solar Cruiser Mission: Demonstrating Large Solar Sails for Deep Space Missions
The Solar Cruiser Mission: Demonstrating Large Solar Sails for Deep Space Missions Les Johnson*, Frank M. Curran**, Richard W. Dissly***, and Andrew F. Heaton* * NASA Marshall Space Flight Center ** MZBlue Aerospace NASA Image *** Ball Aerospace Solar Sails Derive Propulsion By Reflecting Photons Solar sails use photon “pressure” or force on thin, lightweight, reflective sheets to produce thrust. NASA Image 2 Solar Sail Missions Flown (as of October 2019) NanoSail-D (2010) IKAROS (2010) LightSail-1 (2015) CanX-7 (2016) InflateSail (2017) NASA JAXA The Planetary Society Canada EU/Univ. of Surrey Earth Orbit Interplanetary Earth Orbit Earth Orbit Earth Orbit Deployment Only Full Flight Deployment Only Deployment Only Deployment Only 3U CubeSat 315 kg Smallsat 3U CubeSat 3U CubeSat 3U CubeSat 10 m2 196 m2 32 m2 <10 m2 10 m2 3 Current and Planned Solar Sail Missions CU Aerospace (2018) LightSail-2 (2019) Near Earth Asteroid Solar Cruiser (2024) Univ. Illinois / NASA The Planetary Society Scout (2020) NASA NASA Earth Orbit Earth Orbit Interplanetary L-1 Full Flight Full Flight Full Flight Full Flight In Orbit; Not yet In Orbit; Successful deployed 6U CubeSat 90 Kg Spacecraft 3U CubeSat 86 m2 >1200 m2 3U CubeSat 32 m2 20 m2 4 Near Earth Asteroid Scout The Near Earth Asteroid Scout Will • Image/characterize a NEA during a slow flyby • Demonstrate a low cost asteroid reconnaissance capability Key Spacecraft & Mission Parameters • 6U cubesat (20cm X 10cm X 30 cm) • ~86 m2 solar sail propulsion system • Manifested for launch on the Space Launch System (Artemis 1 / 2020) • 1 AU maximum distance from Earth Leverages: combined experiences of MSFC and JPL Close Proximity Imaging Local scale morphology, with support from GSFC, JSC, & LaRC terrain properties, landing site survey Target Reconnaissance with medium field imaging Shape, spin, and local environment NEA Scout Full Scale EDU Sail Deployment 6 Solar Cruiser Mission Concept Mission Profile Solar Cruiser may launch as a secondary payload on the NASA IMAP mission in October, 2024. -

Materials Challenges for the Starshot Lightsail
PERSPECTIVE https://doi.org/10.1038/s41563-018-0075-8 Materials challenges for the Starshot lightsail Harry A. Atwater 1*, Artur R. Davoyan1, Ognjen Ilic1, Deep Jariwala1, Michelle C. Sherrott 1, Cora M. Went2, William S. Whitney2 and Joeson Wong 1 The Starshot Breakthrough Initiative established in 2016 sets an audacious goal of sending a spacecraft beyond our Solar System to a neighbouring star within the next half-century. Its vision for an ultralight spacecraft that can be accelerated by laser radiation pressure from an Earth-based source to ~20% of the speed of light demands the use of materials with extreme properties. Here we examine stringent criteria for the lightsail design and discuss fundamental materials challenges. We pre- dict that major research advances in photonic design and materials science will enable us to define the pathways needed to realize laser-driven lightsails. he Starshot Breakthrough Initiative has challenged a broad nanocraft, we reveal a balance between the high reflectivity of the and interdisciplinary community of scientists and engineers sail, required for efficient photon momentum transfer; large band- Tto design an ultralight spacecraft or ‘nanocraft’ that can reach width, accounting for the Doppler shift; and the low mass necessary Proxima Centauri b — an exoplanet within the habitable zone of for the spacecraft to accelerate to near-relativistic speeds. We show Proxima Centauri and 4.2 light years away from Earth — in approxi- that nanophotonic structures may be well-suited to meeting such mately -

An Assessment of Aerocapture and Applications to Future Missions
Post-Exit Atmospheric Flight Cruise Approach An Assessment of Aerocapture and Applications to Future Missions February 13, 2016 National Aeronautics and Space Administration An Assessment of Aerocapture Jet Propulsion Laboratory California Institute of Technology Pasadena, California and Applications to Future Missions Jet Propulsion Laboratory, California Institute of Technology for Planetary Science Division Science Mission Directorate NASA Work Performed under the Planetary Science Program Support Task ©2016. All rights reserved. D-97058 February 13, 2016 Authors Thomas R. Spilker, Independent Consultant Mark Hofstadter Chester S. Borden, JPL/Caltech Jessie M. Kawata Mark Adler, JPL/Caltech Damon Landau Michelle M. Munk, LaRC Daniel T. Lyons Richard W. Powell, LaRC Kim R. Reh Robert D. Braun, GIT Randii R. Wessen Patricia M. Beauchamp, JPL/Caltech NASA Ames Research Center James A. Cutts, JPL/Caltech Parul Agrawal Paul F. Wercinski, ARC Helen H. Hwang and the A-Team Paul F. Wercinski NASA Langley Research Center F. McNeil Cheatwood A-Team Study Participants Jeffrey A. Herath Jet Propulsion Laboratory, Caltech Michelle M. Munk Mark Adler Richard W. Powell Nitin Arora Johnson Space Center Patricia M. Beauchamp Ronald R. Sostaric Chester S. Borden Independent Consultant James A. Cutts Thomas R. Spilker Gregory L. Davis Georgia Institute of Technology John O. Elliott Prof. Robert D. Braun – External Reviewer Jefferey L. Hall Engineering and Science Directorate JPL D-97058 Foreword Aerocapture has been proposed for several missions over the last couple of decades, and the technologies have matured over time. This study was initiated because the NASA Planetary Science Division (PSD) had not revisited Aerocapture technologies for about a decade and with the upcoming study to send a mission to Uranus/Neptune initiated by the PSD we needed to determine the status of the technologies and assess their readiness for such a mission. -

Analysis of Atmosphere-Breathing Electric Propulsion
Analysis of Atmosphere-Breathing Electric Propulsion IEPC-2013-421 Presented at the 33rd International Electric Propulsion Conference, The George Washington University, Washington, D.C., USA October 6{10, 2013 Tony Sch¨onherr,∗ and Kimiya Komurasakiy The University of Tokyo, Bunkyo, Tokyo, 113-8656, Japan and Georg Herdrichz University of Stuttgart, Stuttgart, Baden-W¨urttemberg, 70569, Germany To extend lifetime of commercial and scientific satellites in LEO and below (100-250 km of altitude) the recent years showed an increased activity in the field of air-breathing electric propulsion as well as beamed-energy propulsion systems. However, preliminary studies showed that the propellant flow necessary for electrostatic propulsion exceeds the mass intake possible within reasonable limits, and that electrode erosion due to oxygen flow might limit the lifetime of eventual thruster systems. Pulsed plasma thruster can be successfully operated with smaller mass intake, and operate at relatively small power demands which makes them an interesting candidate for air-breathing application in LEO, and their feasibility is investigated within this study. Further, to avoid electrode erosion, inductive plasma generator technology is discussed to derive a possible propulsion system that can handle gaseous propellant with no harmful effects. Nomenclature E = discharge energy per pulse FD = drag force imposed on satellite f = discharge frequency h = orbital altitude mbit = mass shot per pulse n = number density t = orbital lifetime I. Introduction Carrying propellant for attitude and orbit control on satellites in an Earth orbit results in an increased satellite mass, and, therefore, yields higher costs for manufacturing and launch of the spacecraft. Electric space propulsion helped in the past to reduce the mass requirements compared to standard chemical propul- sion as a result of the superior specific impulse, but limitations remain with regards to lifetime and lower ∗Assistant Professor, Department of Aeronautics and Astronautics, [email protected]. -

Download Paper
Feasibility study for a near term demonstration of laser-sail propulsion from the ground to Low Earth Orbit Edward E. Montgomery IV Nexolve/Jacobs ESSSA Group Les Johnson NASA Marshall Space Flight Center Herbert D. Thomas NASA Marshall Space Flight Center ABSTRACT This paper adds to the body of research related to the concept of propellant-less in-space propulsion utilizing an external high energy laser (HEL) to provide momentum to an ultra-lightweight (gossamer) spacecraft. It has been suggested that the capabilities of Space Situational Awareness assets and the advanced analytical tools available for fine resolution orbit determination make it possible to investigate the practicalities of a ground to Low Earth Orbit (LEO) demonstration at delivered power levels that only illuminate a spacecraft without causing damage to it. The degree to which this can be expected to produce a measurable change in the orbit of a low ballistic coefficient spacecraft is investigated. Key system characteristics and estimated performance are derived for a near term mission opportunity involving the LightSail 2 spacecraft and laser power levels modest in comparison to those proposed previously by Forward, Landis, or Marx. [1,2,3] A more detailed investigation of accessing LightSail 2 from Santa Rosa Island on Eglin Air Force Base on the United States coast of the Gulf of Mexico is provided to show expected results in a specific case. 1. BACKGROUND The design and construction of the Planetary Society’s LightSail 2 solar sail demonstration spacecraft has captured, in space flight hardware, the concept of small, yet capable spacecraft. The results of recent achievements in high power solid state lasers, adaptive optics, and precision tracking have also made it possible to access the effectiveness and reduced cost of an entry level laser power source. -

DESIGN and DEVELOPMENT of a 30-Ghz MICROWAVE ELECTROTHERMAL THRUSTER
The Pennsylvania State University The Graduate School College of Engineering DESIGN AND DEVELOPMENT OF A 30-GHz MICROWAVE ELECTROTHERMAL THRUSTER A Thesis in Aerospace Engineering by Erica E. Capalungan ©2011 Erica E. Capalungan Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Science August 2011 The thesis of Erica E. Capalungan was reviewed and approved* by the following: Michael M. Micci Professor of Aerospace Engineering Director of Graduate Studies Thesis Advisor Sven G. Bilén Associate Professor of Engineering Design, Electrical Engineering, and Aerospace Engineering George A. Lesieutre Professor of Aerospace Engineering Head of the Department of Aerospace Engineering *Signatures are on file in the Graduate School. ii ABSTRACT Research has been conducted on the microwave electrothermal thruster at The Pennsylvania State University since the 1980’s. Each subsequent thruster incorporated modifications that resulted in improvements in thruster performance compared to previous generations. Operational frequencies evaluated thus far include 2.45 GHz, 7.5 GHz, 8 GHz, and 14.5 GHz. As each thruster increased in operational frequency, plasmas have been ignited with successively lower amounts of input power. With higher frequency and lower power requirements, the physical sizes of the thruster and the power supply have been reduced. Decreased size results in a lighter propulsion system, which is ideal for space missions. This thesis concerns the design and development of a thruster operating at 30 GHz. Electromagnetic modeling was used in the design of the thruster to determine the optimal input antenna size and length. A 2.4-mm antenna size was chosen with a length that is flush with the bottom of the cavity. -

Herman IEPC-2019-651 PPE IPS Final
The Application of Advanced Electric Propulsion on the NASA Power and Propulsion Element (PPE) IEPC-2019-651 Presented at the 36th International Electric Propulsion Conference University of Vienna • Vienna • Austria September 15 – 20, 2019 Daniel A. Herman,1 Timothy Gray,2 NASA Glenn Research Center, Cleveland, OH, 44135, United States and Ian Johnson,3 Taylor Kerl,4 Ty Lee,5 and Tina Silva6 Maxar, Palo Alto, CA, 94303, United States Abstract: NASA is charGed with landinG the first American woman and next American man on the South Pole of the Moon by 2024. To meet this challenGe, NASA’s Gateway will develop and deploy critical infrastructure required for operations on the lunar surface and that enables a sustained presence on and around the moon. NASA’s Power and Propulsion Element (PPE), the first planned element of NASA’s cis-lunar Gateway, leveraGes prior and ongoing NASA and U.S. industry investments in high-power, long-life solar electric propulsion technoloGy investments. NASA awarded a PPE contract to Maxar TechnoloGies to demonstrate a 2,500 kg xenon capacity, 50 kW-class SEP spacecraft that meets Gateway’s needs, aligns with industry’s heritage spacecraft buses, and allows extensibility for NASA’s Mars exploration Goals. Maxar’s PPE concept desiGn, is based on their hiGh heritaGe, modular, and highly reliable 1300-series bus architecture. The electric propulsion system features two 13 kW Advanced Electric Propulsion (AEPS) strings from Aerojet Rocketdyne and a Maxar- developed system comprised of four Busek 6 kW Hall-effect thrusters mounted in pairs on larGe ranGe of motion mechanisms pointing arms with four 6 kW-class, Maxar-built PPUs derived from Geostationary Earth Orbit (GEO) heritage. -

The Development of a Pulsed Plasma Thruster As a Solid Fuel Plasma Source for a High Power Helicon
The Development of a Pulsed Plasma Thruster as a Solid Fuel Plasma Source for a High Power Helicon Ian Kronheim Johnson A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science The University of Washington 2011 Program authorized to offer degree: Aeronautics and Astronautics University of Washington Graduate School This is to certify that I have examined this copy of a master’s thesis by Ian Kronheim Johnson and have found that is it complete and satisfactory in all respects, and that any and all revisions required by the final examining committee have been made. Committee Members: Professor Robert Winglee, Department of Earth and Space Sciences, Chair Professor Tom Jarboe, Department of Aeronautics and Astronautics Date: The University of Washington ii In presenting this thesis in partial fulfillment of the requirements for a master’s degree at the University of Washington, I agree that the Library shall make its copies freely available for inspection. I further agree that extensive copying of this thesis is allowable only for scholarly purposes, consistent with “fair use” as prescribed in the U.S. Copyright Law. Any other reproduction for any purposes or by any means shall not be allowed without my written permission. Signature: Date: The University of Washington iii University of Washington Abstract The Development of a Pulsed Plasma Thruster as a Solid Fuel Plasma Source for a High Power Helicon Ian Kronheim Johnson Chair of the Supervisory Committee: Professor Robert Winglee Earth and Space Sciences As space exploration shifts to lower mass and lower cost missions, the need for improved on-board propulsion systems is growing. -
Application for Designation As an Eligible
STATE OF ILLINOIS ILLINOIS COMMERCE COMMISSION Starlink Services, LLC : : Application for Designation as an Eligible : Telecommunications Carrier for the : 21-0005 Purpose of Receiving Federal Universal : Service Support pursuant to Section : 214(e)(2) of the Telecommunications Act : of 1996. : PROPOSED ORDER I. PROCEDURAL HISTORY On January 4, 2021, Starlink Services, LLC (“Applicant” or “Starlink”) filed with the Illinois Commerce Commission (“Commission”) a verified Application pursuant to Section 214(e)(2) of the Telecommunications Act of 1996 (“1996 Act”), 47 U.S.C. §151 et seq., and Section 54.201 of the Federal Communications Commission (“FCC”) rules requesting designation as an eligible telecommunications carrier (“ETC”) in the census blocks in which it was awarded Rural Digital Opportunities Fund (“RDOF”) support (the “Service Area”) under the provisions of Section 54.201(d) of the FCC rules. Applicant seeks an ETC designation in the Service Area in order to receive Universal Service Fund (“USF”) support from the federal RDOF. Pursuant to notice as required by law and the rules and regulations of the Commission, hearings were held in this matter before a duly authorized Administrative Law Judge (“ALJ”) of the Commission on January 27, 2021, March 18, 2021, April 7, 2021, April 12, 2021, April 15, 2021, and April 26, 2021. Applicant and Commission Staff (“Staff”) were each represented by counsel. There were no petitions to intervene. The evidentiary hearing took place on April 26, 2021. Applicant presented the testimony of Matthew Johnson, a Senior Business Operations Analyst employed by Space Exploration Technologies Corp. (“SpaceX”), the parent company of Applicant. Staff presented the testimony of David Sackett, an Economic Analyst in the Policy Division of the Public Utilities Bureau. -

Espinsights the Global Space Activity Monitor
ESPInsights The Global Space Activity Monitor Issue 1 January–April 2019 CONTENTS SPACE POLICY AND PROGRAMMES .................................................................................... 1 Focus .................................................................................................................... 1 Europe ................................................................................................................... 4 11TH European Space Policy Conference ......................................................................... 4 EU programmatic roadmap: towards a comprehensive Regulation of the European Space Programme 4 EDA GOVSATCOM GSC demo project ............................................................................. 5 Programme Advancements: Copernicus, Galileo, ExoMars ................................................... 5 European Space Agency: partnerships continue to flourish................................................... 6 Renewed support for European space SMEs and training ..................................................... 7 UK Space Agency leverages COMPASS project for international cooperation .............................. 7 France multiplies international cooperation .................................................................... 7 Italy’s PRISMA pride ................................................................................................ 8 Establishment of the Portuguese Space Agency: Data is King ................................................ 8 Belgium and Luxembourg -

Espinsights the Global Space Activity Monitor
ESPInsights The Global Space Activity Monitor Issue 2 May–June 2019 CONTENTS FOCUS ..................................................................................................................... 1 European industrial leadership at stake ............................................................................ 1 SPACE POLICY AND PROGRAMMES .................................................................................... 2 EUROPE ................................................................................................................. 2 9th EU-ESA Space Council .......................................................................................... 2 Europe’s Martian ambitions take shape ......................................................................... 2 ESA’s advancements on Planetary Defence Systems ........................................................... 2 ESA prepares for rescuing Humans on Moon .................................................................... 3 ESA’s private partnerships ......................................................................................... 3 ESA’s international cooperation with Japan .................................................................... 3 New EU Parliament, new EU European Space Policy? ......................................................... 3 France reflects on its competitiveness and defence posture in space ...................................... 3 Germany joins consortium to support a European reusable rocket......................................... -

Since Our Last SIA Member News Summary, Press Releases and Posts
SIA PRESIDENT’S REPORT – MEMBER NEWS FOR FEB 2021 Since our last SIA Member News Summary, press releases and posts from many SIA Members including ABS, Boeing, Hawkeye 360, Inmarsat, Omnispace, OneWeb, Planet, SES, SpaceX, Spire Global, ULA and Viasat have released news. Please see the summary of stories and postings below and click on the COMPANY LINK for more details. Above: The ULA Vulcan Centaur launch platform (VLP) and Pathfinder Tanking Test (PTT) booster nears the ULA Spaceflight Operations Control Center located at the Cape Canaveral Space Force Station. For more details, see the information below. Photo credit: Image courtesy of ULA. ULA On Feb 22nd, ULA posted the following blog announcement. “At ULA's Vertical Integration Facility (VIF) on Monday, Feb. 15, the Vulcan Centaur program achieved a significant milestone when the Pathfinder Tanking Test (PTT) booster was hoisted into place aboard the Vulcan Launch Platform (VLP). PTT is a flight configuration core stage that will complete validations of the launch site and later be used on a Vulcan Centaur launch into space.” Earlier in the month, a pathfinder first stage that will pave the way for Vulcan Centaur's inaugural launch arrived at Cape Canaveral from ULA's factory in Decatur, Alabama, to begin launch site testing of the next-generation rocket. The Pathfinding Tanking Test (PTT) booster, a flight configuration Vulcan Centaur core fitted with a pair of BE-4 development engines, was produced using the advanced automation and tooling in Decatur that is designed for maximum efficiency and reliability. INMARSAT On Feb 24th, Inmarsat announced the appointment of Rajeev Suri as CEO replacing Rupert Pearce.